







关于DS18B20温度传感器的时序详解及代码分析
简要说明测温工作**:**DS18B20的核心功能是它的直接读数字的温度传感器。温度传感器的精度为用户可编程的9,10,11或12位,分别以0.5℃,0.25℃,0.125℃和0.0625℃增量
递增。在上电状态下默认的精度为12位(所以最后获取的数据要乘以0.0625得到实际温度)。DS18B20启动后保持低功耗等待状态;
当需要执行温度测量(和AD转换)时,总线控制器必须发出[44h]命令。在那之后,
产生的温度数据以两个字节的形式被存储到高速暂存器的温度寄存器中(所以后期获取数据时,必须连续读取两次数据),下面介绍时序及相应代码(以12MHz的晶振为例,数据线定义为DQ)
,其中DS18B20的所有通信都是以由复位脉冲组成的初始化序列开始的,并采用的是单总线协议。
操作顺序:初始化——>写相应的控制指令(用写数据函数完成)——>读取DS18B20所采集到的数据(用读数据函数完成)———>把采集的数据转化成实际的温度。
延时函数: (15+15*z)us 的延时
void delay_us(uint z)
{
for(z;z>0 ; z--)
{
_nop_(); _nop_();
_nop_(); _nop_();
}
_nop_(); _nop_();
}*时序图及代码分析如下:*
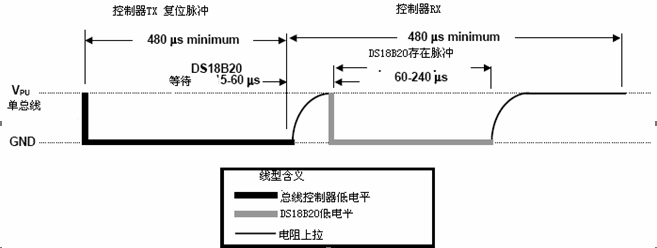
一、初始化(见下图)
在初始化序列期间,总线控制器拉低总线并保持480us(改延时可以在480~960us之间,但需要在480us以内释放总线)以发出一个复位脉
冲,然后释放总线,进入接收状态(等待DS18B20应答)。总线释放后,单总线由上拉电阻拉到高电平。当DS18B20探测到I/O引脚上的上升沿后,等待15-60us,然后其以拉低总线60-240us的方式发出存在脉冲。至此,初始化时序完毕。
初始化代码:
带返回值,有利于检验。
bit DS18B20_init()
{
bit ack = 1;
DQ = 0; //主机拉低总线
delay_us(32); //延时495us
DQ = 1; //释放总线,同时IO口产生的上升沿能被DS18B20所检测到
delay_us(4); //延时大于60us,确保接下来DS18B20能发出60~240us的存在脉冲应答
ack = DQ; //在此60~240us之内DQ被DS18B20所占用,若存在,则其会发送一个低电平信号,DQ被DS18B20拉低,则ack为0,反之为1
delay_us(15); //延时达240us,让DS18B20释放总线
DQ = 1;
return(ack);
}初始化代码写至此,其实我们便可以用数码管显示来检验初始化是否成功(即DS18B20有应答),数码管显示”0“,初始化失败,显示”1“,则初始化成功。
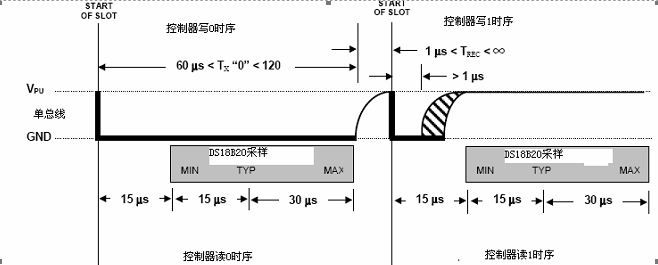
二、DS18B20的写时序(见下图):
主机在写时隙向DS18B20写入数据,其中分为写”0”时隙,和写”1”时隙。总线主机使用写“1”时间隙向DS18B20写入逻辑1,使用写“0”时间隙向DS18B20写入逻辑0.所有的写时隙必须有最少60us的持续时间,相邻两个写时隙必须要有最少1us的恢复时间。两种写时隙都通过主机拉低总线产生(见下图)为了产生写1时隙。
在拉低总线后主机必须在15μs内释放总线。在总线被释放后,由于上拉电阻将总线恢复为高电平。为了产生写”0”时隙,在拉低总线后主机必须继续拉低总线以满足时隙持续时间的要求(至少60μs)。
在主机产生写时隙后,DS18B20会在其后的15~60us的一个时间段内采样单总线(DQ)。在采样的时间窗口内,如果总线为高电平,主机会向DS18B20写入1;如果总线为低电平,主机会向DS18B20写入0。
综上所述,所有的写时隙必须至少有60us的持续时间。相邻两个写时隙必须要有最少1us的恢复时间。所有的写时隙(写0和写1)都由拉低总线产生。
DS18B20的写时序代码
写字节函数、由低位至高位,向DS18B20写入一个字节的数据。
无返回值。
形参byte是待写入的字节数据,读取8次,移位8次,保证每位都传输至DQ
void DS18B20_write_byte(uchar byte)
{
uchar i;
for(i=0 ; i<8 ; i++)
{
DQ = 0; //拉低总线,产生写时隙
_nop_();
_nop_(); //大于1us的延时
DQ = 1; //15us之内释放总线
_nop_();
_nop_(); //适当延时
DQ = byte & 0x01; //将字节低位写入单总线
delay_us(3); //在15~60us内等待DS18B20来采集信号
DQ = 1; //释放总线
byte >>= 1; //每次讲要读取的数据位移至最低位,
}
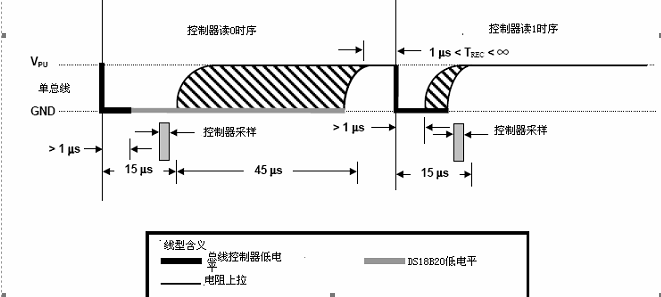
}三、DS18B20的读时序(见下图)
主机发起读时序时,DS18B20仅被用来传输数据给控制器。因此,总线控制器在发出读暂存器指令[0xBE]或读电源模式指令[0xB4]后必须立刻开始读时序,DS18B20可以提供请求信息。除此之外,总线控制器在发出发送温度转换指令[0x44] (或召回EEPROM指令[0xB8])之后读时序,详见DS18B20 的芯片手册上的功能指令。
所有读时序必须最少60us,包括两个读周期间至少1us的恢复时间。当总线控制器把数据线从高电平拉到低电平时,读时序开始,数据线必须至少保持1us,然后总线被释放。DS18B20 通过拉高或拉低总线上来传输”1”或”0”。当传输逻辑”0”结束后,总线将被释放,通过上拉电阻回到上升沿状态。从DS18B20输出的数据在读时序的下降沿出现后15us 内有效。因此,总线控制器在读时序开始后必须停止把I/O口驱动为低电15us,以读取I/O口状态。
DS18B20的读时序的代码
读字节函数、由低位至高位,读取DS18B20所采集到的数据。
带返回值,可结合前面的写时序,对写、读数据函数进行检验(后面会提到检验过程及效果)
byte 是读取到的字节数据。其中,此函数读取8次,移位7次(实际移位8次)
uchar DS18B20_read_write()
{
uchar i;
uchar byte; //byte为要接收到的数据
for(i=0 ; i<8 ; i++)
{
DQ = 0; //产生读时序
_nop_();
_nop_(); //简单延时
DQ = 1; //释放总线,有从机DS18B20占用
byte >>= 1; //先进行移位
if(DQ) //让DS18B20占用总线,发出采集到的信号
byte |= 0x80; //若DQ=1,则让当前byte最高位为1,在下次循环中移位至次高位,最后达到从低位到高位接收的目的;若DQ=0,则可跳过此语句,直接在下次循环对byte进行移位补0。以上操作15us以内完成
delay_us(3); //延时60us
DQ = 1; //释放总线
_nop_();
}
}下面简单说说如何检验写、读时序的程序:
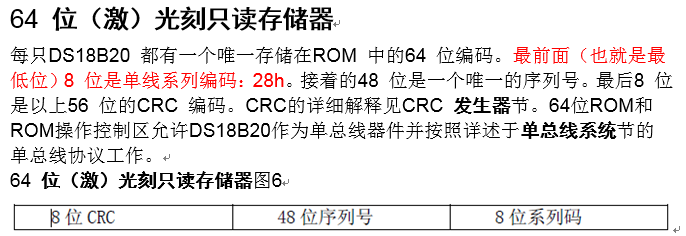
检验写、读的程序,本人采用DS18B20中特有的64位光刻ROM存储器(其中涉及一些指令,具体请见芯片的数据手册)。数据手册上说明,“64位光刻ROM的排列是:开始(最低)8位是产品类型标号,对于DS18B20来说都是(28H),接着的48位是该DS18B20自身的序列号,最后8位是前面56位的循环冗余校验码(CRC=X8+X5+X4+1)。光刻ROM的作用是使每一个DS18B20都各不相同,这样就可以实现一根总线上挂接多个DS18B20的目的。
因为写函数刚好是从最低位开始读,所以我们先:
调用函数:DS18B20_write_byte(0xcc);
接着再调用函数:DS18B20_read_byte();
用数码管,或者液晶,将读函数的返回值显示出来,正确的显示应该为:40。
这样,我们便能确定我们的写,读函数的正误了。

















 1979
1979

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









