









0 背景介绍
很多没有激光雷达设备的用户,也想生成地形数据,这时我们可以想到目前各个行业都普遍在使用的设备----无人机。
伴随着无人机倾斜摄影技术的普及和发展,不仅让我们能够快速获取城市三维模型,还能提供高精度DSM和DOM数据。进而通过DSM转换成DEM数据已经不成问题,毕竟去除DSM数据里面的建筑、植被等人工地物,就可以得到DEM。
点云数据一般用于构建DEM数据、三维建模、农林普查、土方计算以及地质灾害监测等。较为常见的是用激光雷达点云数据提取地形,殊不知,用点云大师基于照片的航测成果也能构建DEM数据!
1. DEM结果展示
一般需要通过2-3个专业软件多步操作将点云数据处理成DEM和等高线数据,但我只需要1个!先看看我处理后的结果:
施工工地处理后的地形效果
原始数据效果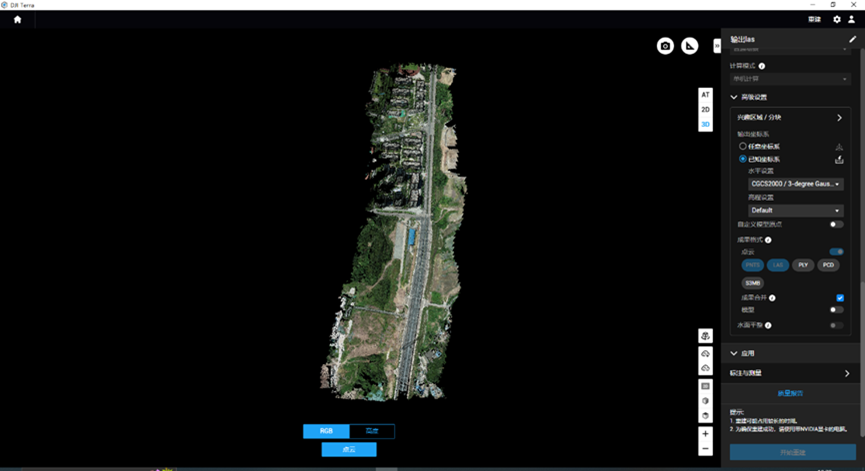
2.操作过程
2.1 无人机生成点云数据
使用无人机航测成果生成点云数据
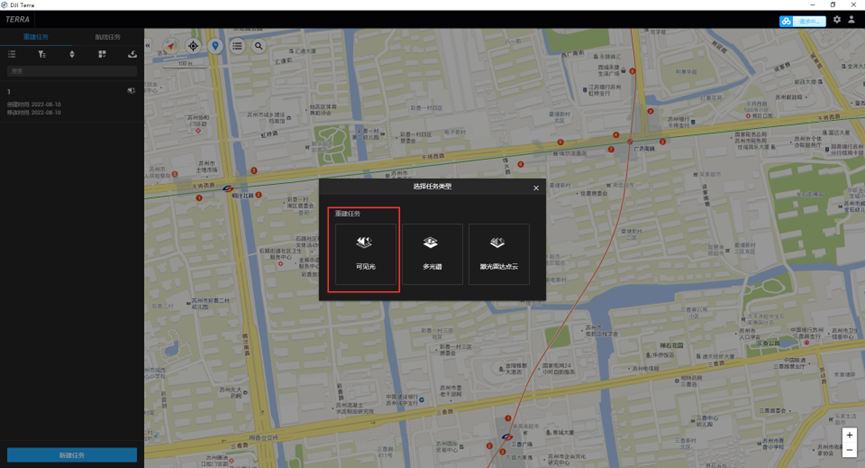
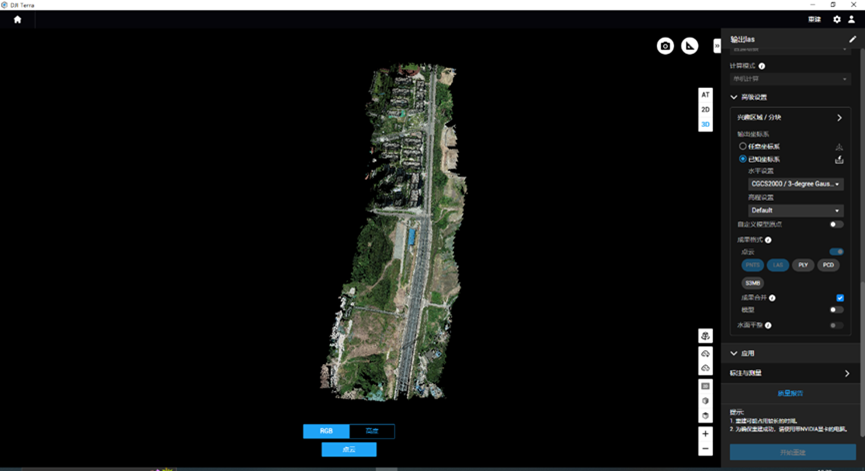
2.1.1 大疆智图构建点云
在大疆智图中可以用无人机采集的倾斜摄影照片数据构建las点云数据。
新建任务 → 可见光 →导入照片 → 配置参数 →选择生成点云 →勾选LAS格式
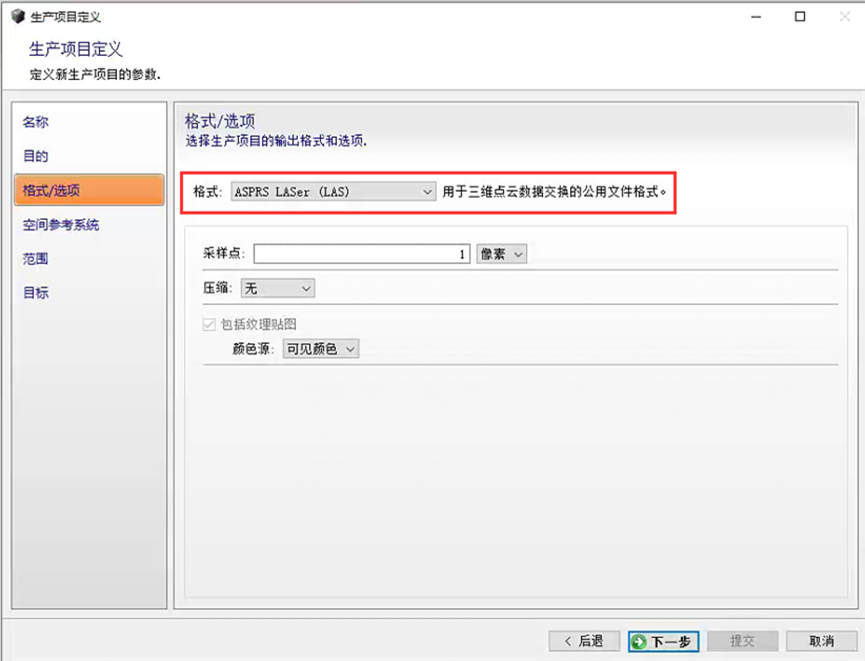
2.1.2 CC(ContextCapture/Smart3D)构建点云
在Context Capture软件中加载倾斜摄影照片数据,先进行空三计算,在提交项目生产,在生产配置参数过程中:
· 目的:三维点云
· 格式:LAS
· 空间参考系统:选用正确的投影信息

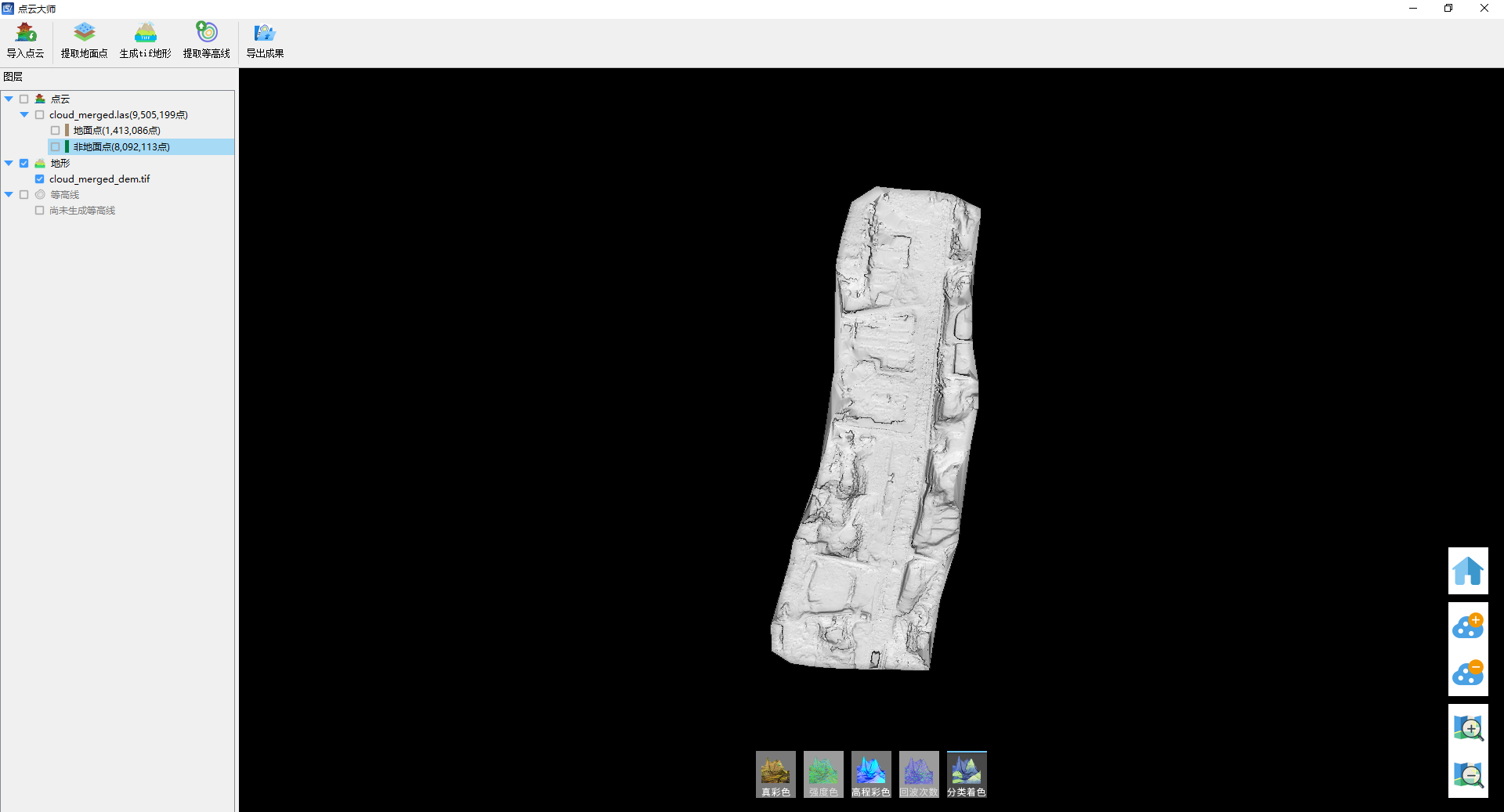
2.2 点云大师剔除地表、树木构建DEM
倾斜摄影结果 + 图新地球可达到没有激光雷达的航测成果,也能快速提取地面点构建DEM。
图新地球·桌面版实验室模块中包括强大的点云大师功能,可提供大量点云查看、分类和提取工具。包括三维视图、点云赋色、自动地面点检测和分类和点大小控制;地形表面生成,以及更多。

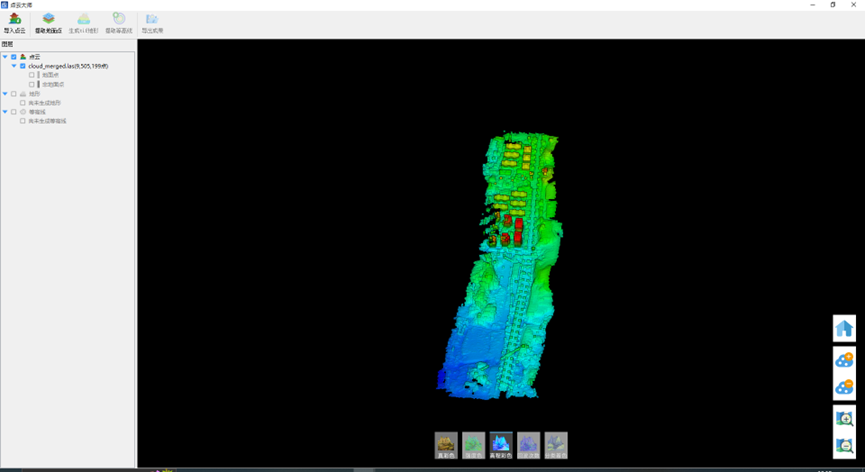
2.2.1 点云大师导入点云数据
用图新地球的点云大师模块导入las格式数据。(PS:点云大师提供为点云数据赋予不同颜色信息功能,可以更直观的展示真实世界)
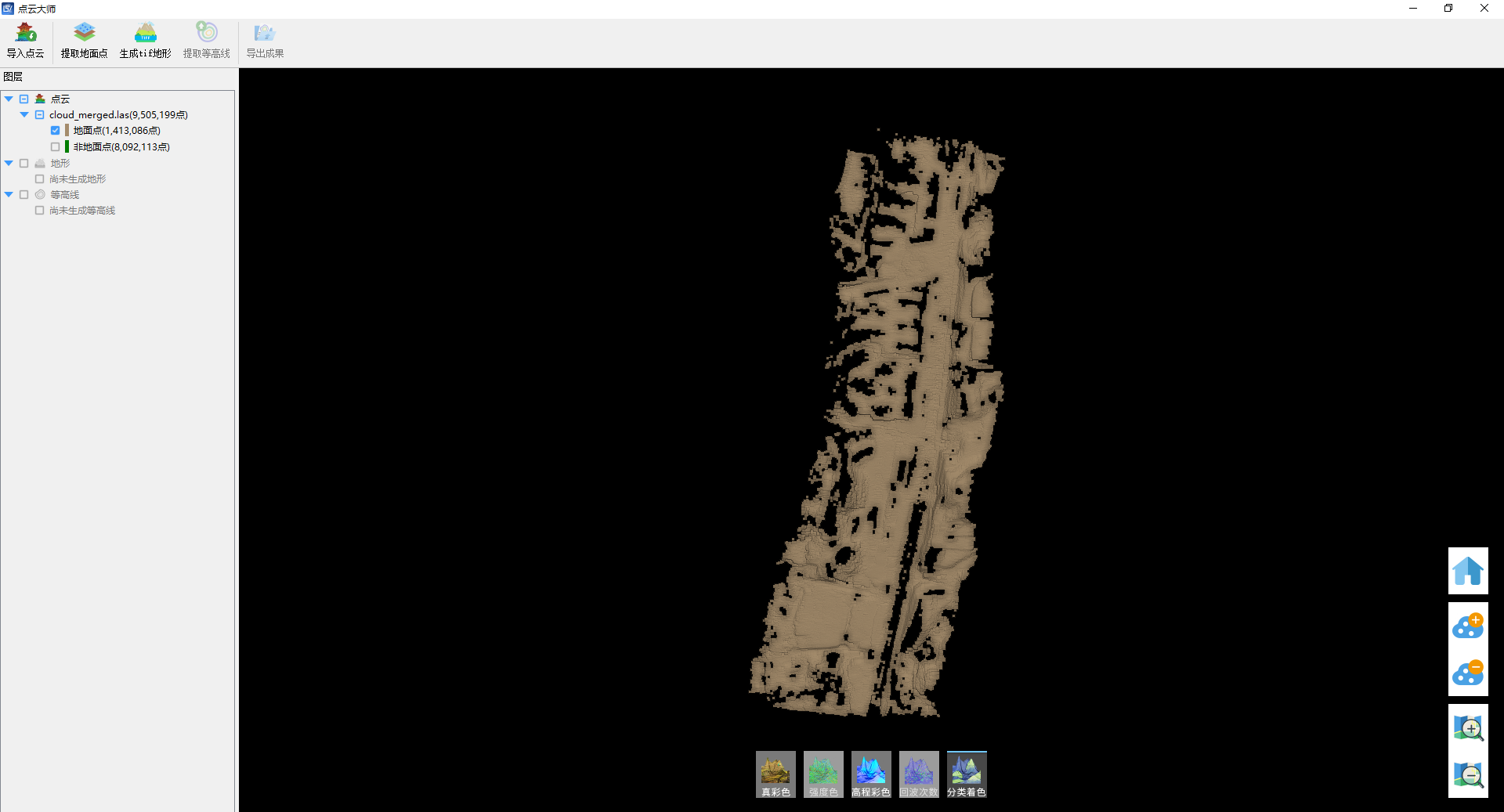
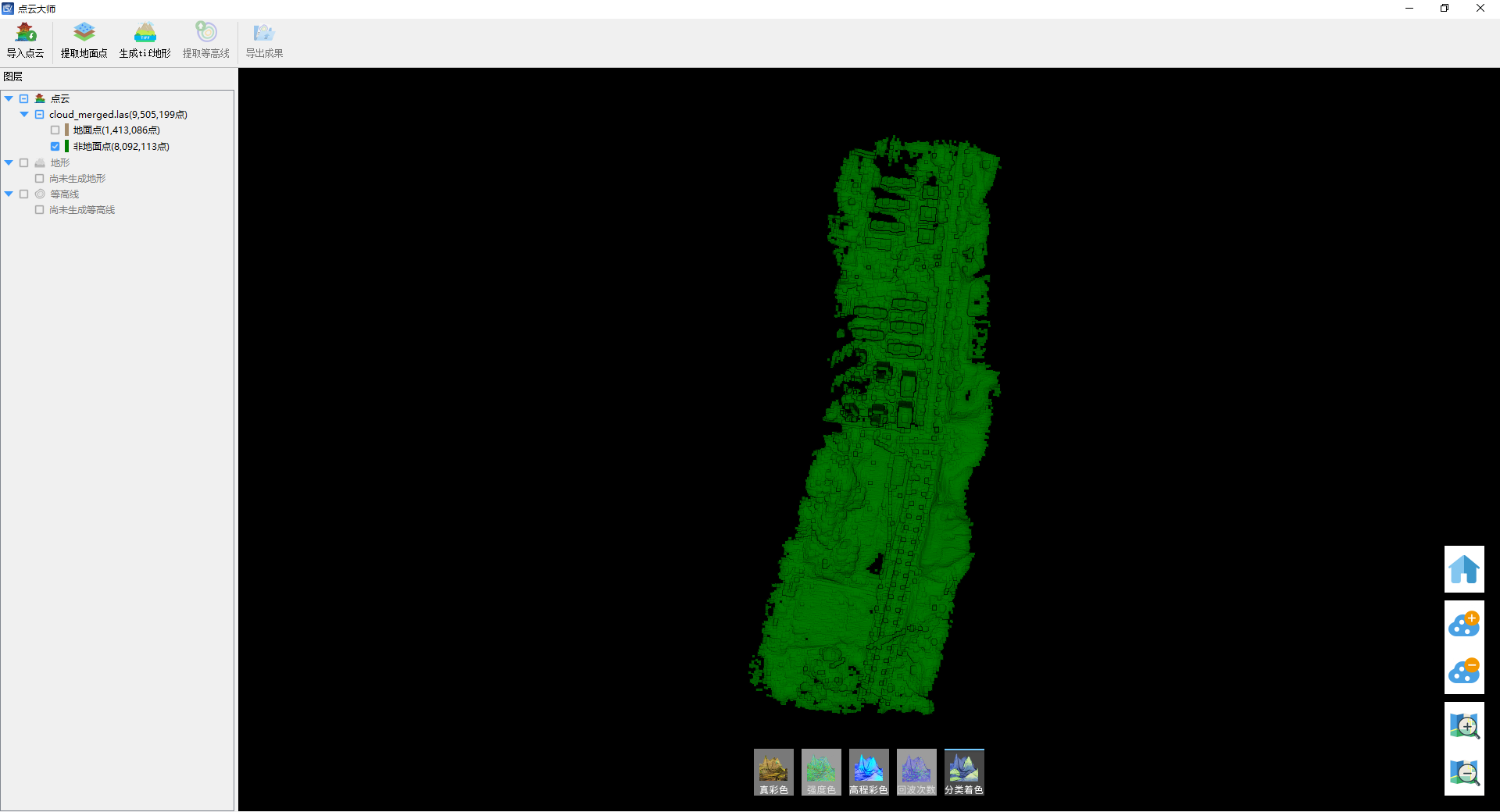
2.2.2 点云大师提取地面点
不同点可能落在不同的对象表面,提取落在地面上的点,过滤掉没有落在地面上的点,将两者用不同颜色进行区分,进而就能得到地面的真正高度。并且可以单独显隐某个分类的点。

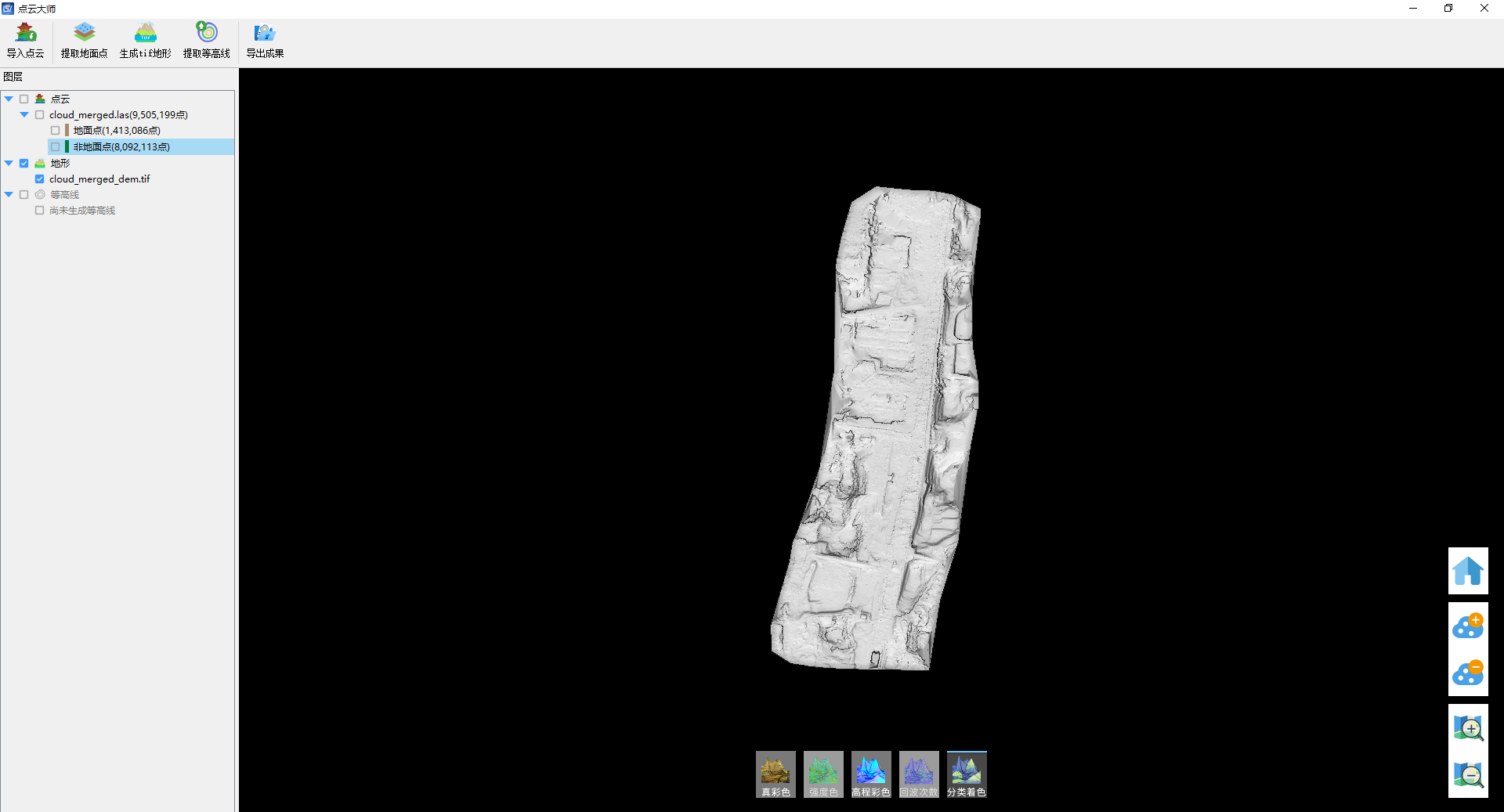
2.2.3 生成DEM
点云数据完成地面点提取后,可以得到精准的地面点高程信息,通过这些高程值生成数字高程模型(DEM)。
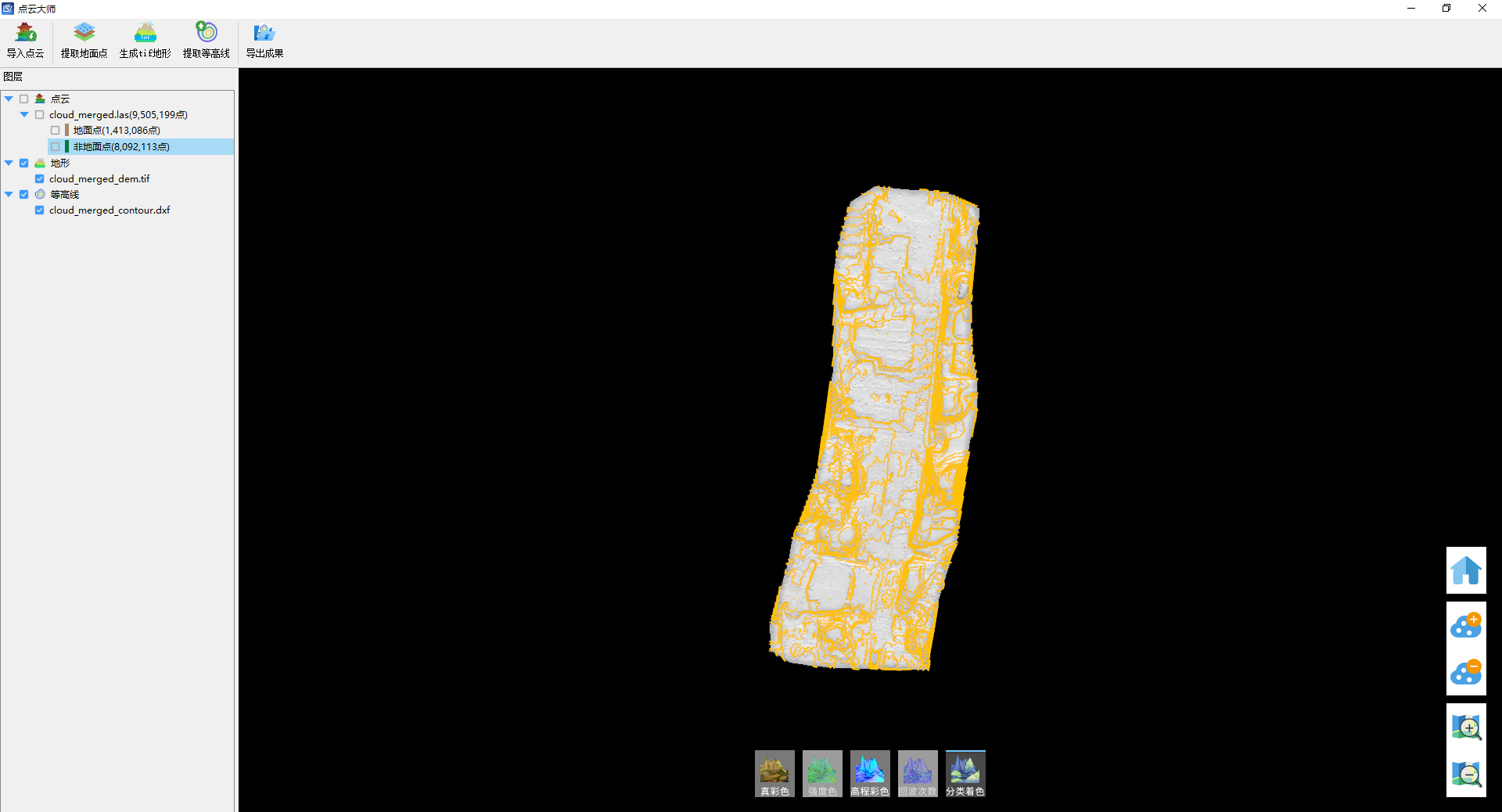
2.2.4 点云大师生成等高线
通过点云生成了地形后,再基于地形提取高精度的等高线。
整体操作下来,我们只用到了图新地球·桌面端这一个软件,就可以将倾斜摄影数据生成DEM数据。通过点云数据提取的高精度地形(DEM)和等高线数据,都可以通过图新地球导出,并随时应用到你的其他工作环节中。

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









