






 本项目介绍了一个多波束前视声呐目标识别数据集UATD,包含9200张声呐图像及10类目标的标注。旨在解决水下目标检测研究中的数据集稀缺问题,并推动该领域的技术发展。
本项目介绍了一个多波束前视声呐目标识别数据集UATD,包含9200张声呐图像及10类目标的标注。旨在解决水下目标检测研究中的数据集稀缺问题,并推动该领域的技术发展。
鉴于水下实验的高成本,高专业性,高复杂度的情况,开源水下数据集一直较为稀少。拥有数据的研究机构基本上也只限于自身使用。虎鲸开源计划致力于构建一个开放的实验平台,实验场地、硬件、软件、数据均在开源开放的范畴内。虎鲸开源计划期望能改善当前水下研究的条件,降低水下研究的门槛,促进水下研究的发展。
目前我们团队在虎鲸开源计划中开源了一个多波束前视声呐目标识别数据集UATD(Underwater Acoustic Target Detection)。数据集含10类目标,共9200张带标注的声呐图像。同时,数据集相关文章已发表于《Scientific Data》杂志,欢迎广大研究爱好者关注使用。另外不得不吐槽一下,杂志排版工作是印度团队做的,实在是太丑了,三哥真的不靠谱。我个人在arXiv上的版本链接我也会一并列出。文章doi如下:
https://doi.org/10.48550/arXiv.2212.00352 https://doi.org/10.48550/arXiv.2212.00352
https://doi.org/10.48550/arXiv.2212.00352
在此简要说一下我们数据集的特色,详细情况还请直接阅读文章。
我们数据集最大的特色为提供前视声呐原始的回波强度数据。前视声呐输出的信息以距离和方位角为维度,为了满足人类的视觉习惯,厂商提供的前视声呐软件通常会对数据做一些处理,包括滤波和伪色彩等,最特殊的是输出图像是扇形处理后的。如下图:
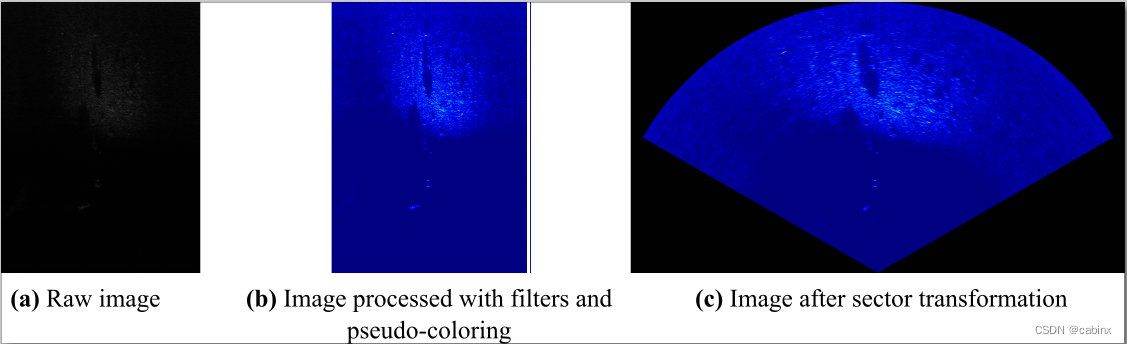
处理后的声呐图像更方便人类操作员辨认目标,但滤波和伪色彩处理可能会导致部分数据丢失,扇形的图像在标注时可能会引入多余的信息(扇形区域外),这对于计算机目标识别算法的研究来说都是不友好的。
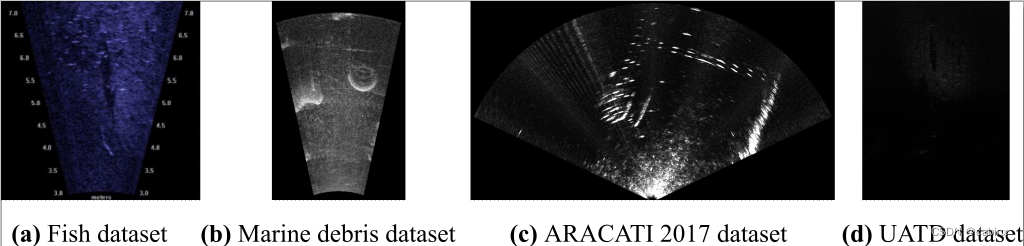
诚然,目前还是存在一些开源前视声呐数据集的,但这些数据集一来都是处理过的,二来数据集规模也较小,具体情况请参考文章。我们的数据与其它数据集数据对比如下图:
我们为历届全国水下机器人大赛(UPRC)线上赛目标识别赛声学赛道提供赛题数据。2022年的比赛地址如下:DC竞赛——领先的大数据与人工智能竞赛平台DataCastle(DC竞赛)是国内领先的大数据与人工智能竞赛平台,提供在线编程工具DCLab、数据集、开源分享和在线课程,积累20万数据科学领域用户。https://challenge.datacastle.cn/v3/cmptDetail.html?id=680
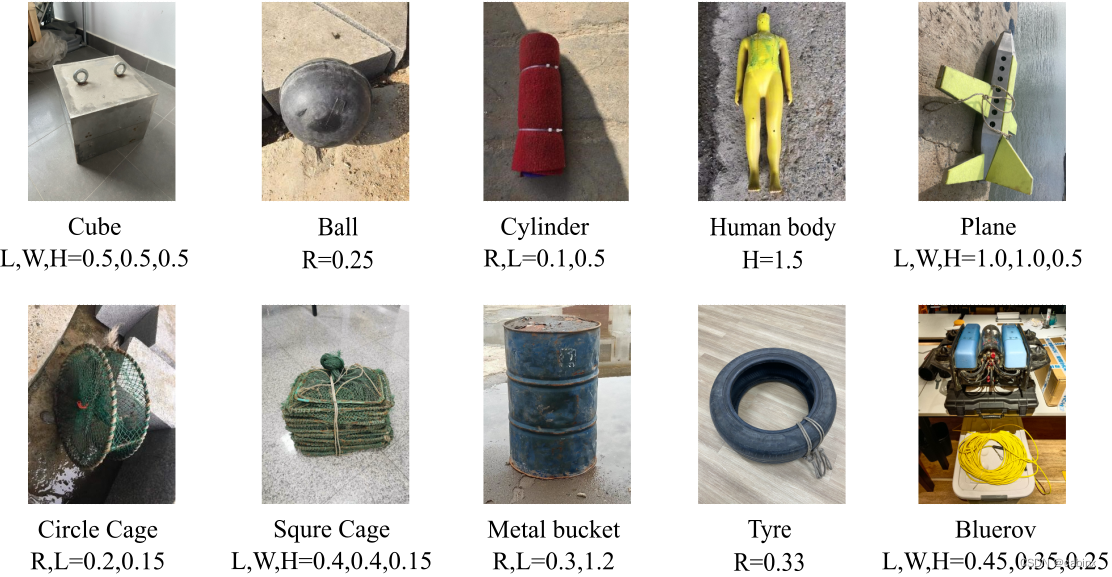
我们在大连金石滩和茂名好心湖等地采集了10类目标的数据,从中筛选质量较好的数据进行标注,最终选取9200张形成数据集。10类目标及其尺寸(m)如下图:
数据集分3个压缩文件:"UATD_Training.zip", "UATD_Test_1.zip", "UATD_Test_2.zip"。每个压缩文件内有两个文件夹,image文件夹存声呐图像,annotation文件夹存标注文件。Trainning压缩文件内含7600对数据(图像加标注),其余两个压缩文件内含800对数据。
一对数据范例如下图所示:
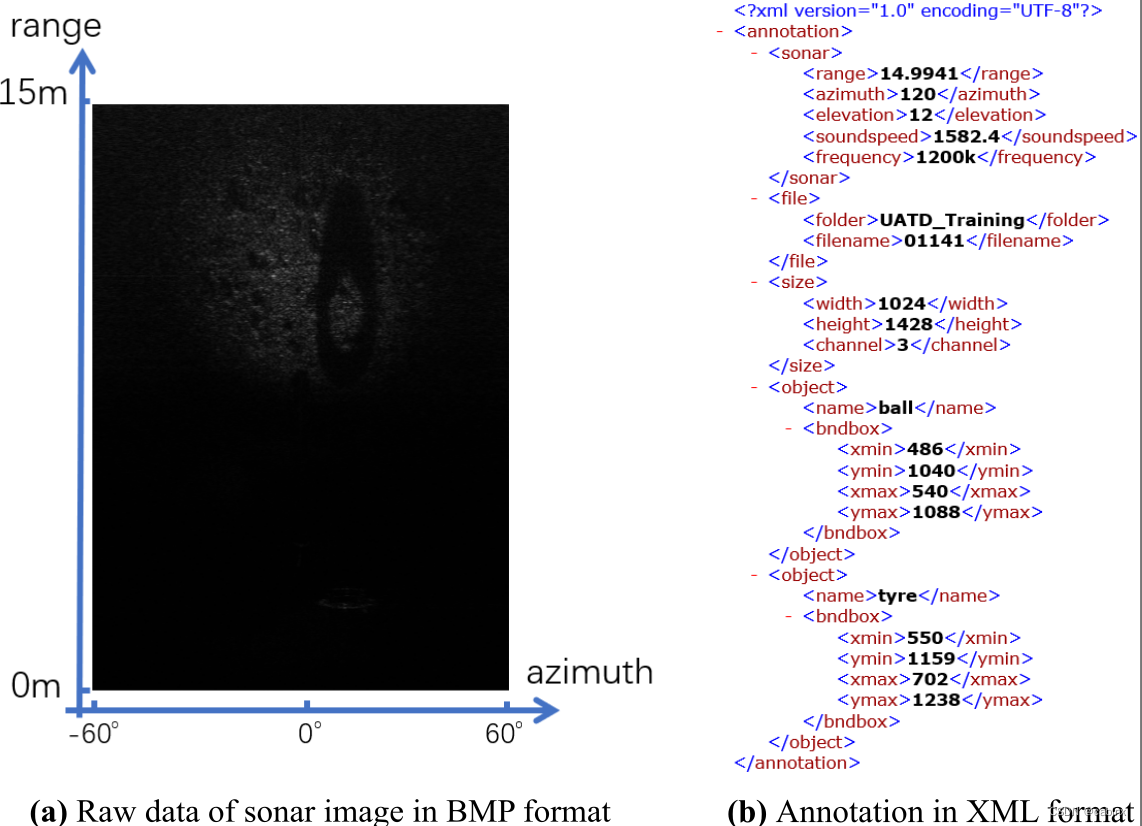
我们给出了采集数据时声呐的工作状态信息,包括量程,开角,声速,工作频率等,因为我们认为这些信息对声呐目标识别是有帮助的。具体标注文件中各参数请参考文章。
由于声呐数据的特殊性,我们还开发了一款用于声呐图像标注软件OpenSLT。软件的具体信息请参考文章。软件也打包为"UATD_OpenSLT.zip"和数据集一起开源了,里面的README.md可视为用户手册。
数据集经历了三次大赛的验证,当然我们也用一些通用的识别算法框架对数据集进行了验证。
文章中的数据集的链接地址是在figshare上,对国内平台不太友好。我们也将数据集上传到了虎鲸开源平台,但平台上的数据集是我们的早期版本,不是文章的配套版本,但差异不大,仅删除了一些无用的标注的参数项,以及一些参数名称的修正使之更准确。平台地址:
海洋空间环境感知(虎鲸)开源计划 - OpenI - 启智AI开源社区提供普惠算力!OpenI启智开源社区旗下的一站式AI开发协作平台,汇聚人工智能开源项目;提供代码托管、数据共享、模型训练等AI开发流水线功能;用户可在线使用鹏城实验室搭建的鹏城云脑、中国算力网的普惠算力,包含GPU、NPU等多样化加速资源。https://openi.pcl.ac.cn/OpenOrcinus_orca项目名为URPC2022_sonar_images_dataset,在项目的Dataset界面可以下载。
我们也将数据集上传到了百度云上,链接: 百度网盘 请输入提取码。
提取码:znug

















 3670
3670

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









