









python+opencv实现高斯平滑滤波
python+opencv实现阈值分割
(2016-5-10)到OpenCV-Python Tutorials’s documentation可以下载
功能:
创建一个滑动条来控制检测直线的长度阈值,即大于该阈值的检测出来,小于该阈值的忽略
注意:这里用的函数是HoughLinesP而不是HoughLines,因为HoughLinesP直接给出了直线的断点,在画出线段的时候可以偷懒
代码:
# -*- coding: utf-8 -*-
import cv2
#两个回调函数
def HoughLinesP(minLineLength):
global minLINELENGTH
minLINELENGTH = minLineLength + 1
print "minLINELENGTH:",minLineLength + 1
tempIamge = scr.copy()
lines = cv2.HoughLinesP( edges, 1, cv2.cv.CV_PI/180, minLINELENGTH, 0 )
for x1,y1,x2,y2 in lines[0]:
cv2.line(tempIamge,(x1,y1),(x2,y2),(0,255,0),1)
cv2.imshow(window_name,tempIamge)
#临时变量
minLineLength = 20
#全局变量
minLINELENGTH = 20
max_value = 100
window_name = "HoughLines Demo"
trackbar_value = "minLineLength"
#读入图片,模式为灰度图,创建窗口
scr = cv2.imread("G:\\homework\\building.bmp")
gray = cv2.cvtColor(scr,cv2.COLOR_BGR2GRAY)
img = cv2.GaussianBlur(gray,(3,3),0)
edges = cv2.Canny(img, 50, 150, apertureSize = 3)
cv2.namedWindow(window_name)
#创建滑动条
cv2.createTrackbar( trackbar_value, window_name, \
minLineLength, max_value, HoughLinesP)
#初始化
HoughLinesP(20)
if cv2.waitKey(0) == 27:
cv2.destroyAllWindows()调用:
>>> import os
>>> os.chdir("g:\homework")
>>>
>>> import HoughLines
minLINELENGTH: 20
minLINELENGTH: 21
minLINELENGTH: 22
minLINELENGTH: 23
minLINELENGTH: 25
minLINELENGTH: 26
minLINELENGTH: 27
minLINELENGTH: 28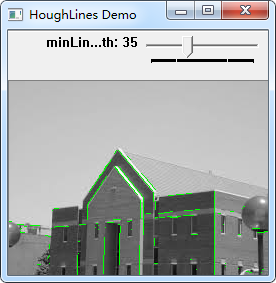















 518
518

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









