







在vscode中Debug ros c++程序
1 在Debug模式下编译
如果用命令行catkin_make,在输入catkin_make时加上一个参数:
catkin_make -DCMAKE_BUILD_TYPE=Debug
或者直接修改CMakelist.txt,添加以下代码:
SET(CMAKE_BUILD_TYPE "Debug")
SET(CMAKE_CXX_FLAGS_DEBUG "$ENV{CXXFLAGS} -O0 -Wall -g -ggdb")
SET(CMAKE_CXX_FLAGS_RELEASE "$ENV{CXXFLAGS} -O3 -Wall")
2 编写launch文件
rosrun package node 改为roslaunch package xxx.launch
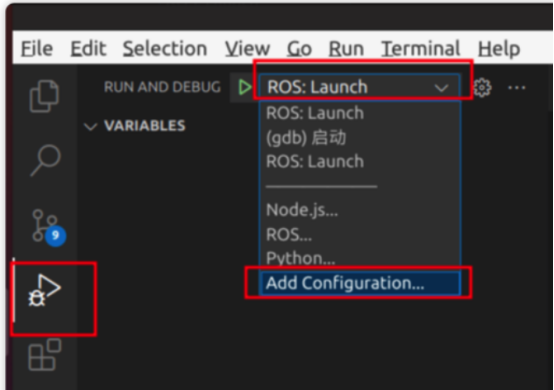
3 vscode debug配置
"version": "0.2.0",
"configurations": [
{
"name": "ROS: Launch",
"type": "ros",
"request": "launch",
"target": "/home/aaa/mycompany/15weeding/infer/yolov8/yolov8_ws_4/src/instance_seg/launch/instance_seg.launch"
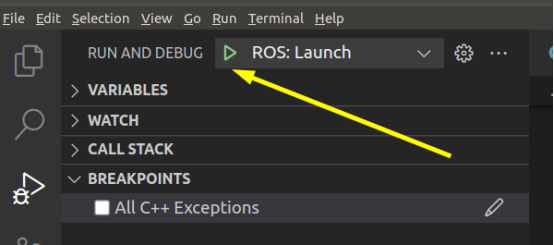
},4 Debug
打断点
启动roscore,点击绿色三角
调试方法
一种是调试coredump文件,另一种是在线调试。
大多使用在线调试,而在线调试又分为 roslaunch 调试和 rosrun node调试
使用gdb命令行在线调试
1安装xterm
sudo apt install xterm
2 在Debug模式下编译
如果用命令行catkin_make,在输入catkin_make时加上一个参数:
catkin_make -DCMAKE_BUILD_TYPE=Debug
或者直接修改CMakelist.txt,添加以下代码:
SET(CMAKE_BUILD_TYPE "Debug")
SET(CMAKE_CXX_FLAGS_DEBUG "$ENV{CXXFLAGS} -O0 -Wall -g -ggdb")
SET(CMAKE_CXX_FLAGS_RELEASE "$ENV{CXXFLAGS} -O3 -Wall")
launch文件添加GDB调试指令
在node标签中添加参数
launch-prefix="xterm -e gdb -ex run --args"
<launch>
<node pkg="learning_topic" type="person_subscriber" name="talker" output="screen" launch-prefix="xterm -e gdb -ex run --args"/>
<node pkg="learning_topic" type="person_publisher" name="listener" output="screen" />
</launch>
The launch-prefix attribute of the tag that, among other things, makes it easy to debug a ROS node process. Here are some example launch-prefixes you might find useful:
launch-prefix=“xterm -e gdb --args” : run your node in a gdb in a separate xterm window, manually type run to start it
launch-prefix=“gdb -ex run --args” : run your node in gdb in the same xterm as your launch without having to type run to start it
launch-prefix=“stterm -g 200x60 -e gdb -ex run --args” : run your node in gdb in a new stterm window without having to type run to start it
launch-prefix=“valgrind” : run your node in valgrind
这个valgrind工具可以用于检测内存泄露,并执行性能分析
launch-prefix=“xterm -e” : run your node in a separate xterm window
launch-prefix=“nice” : nice your process to lower its CPU usage
launch-prefix=“screen -d -m gdb --args” : useful if the node is being run on another machine; you can then ssh to that machine and do screen -D -R to see the gdb session
launch-prefix=“xterm -e python -m pdb” : run your python node a separate xterm window in pdb for debugging; manually type run to start it
rosrun node 的方式进行调试
rosrun --prefix 'gdb -ex run --args' [package_name] [node_name]
gdb core dump 调试
在Linux下可通过core文件来获取当程序异常退出(如异常信号SIGSEGV, SIGABRT等)时的堆栈信息。core dump叫做核心转储,当程序运行过程中发生异常的那一刻的一个内存快照,操作系统在程序发生异常而异常在进程内部又没有被捕获的情况下,会把进程此刻内存、寄存器状态、运行堆栈等信息转储保存在一个core文件里,叫core dump。core文件是程序非法执行后core dump后产生的文件,该文件是二进制文件,可以使用gdb、elfdump、objdump打开分析里面的具体内容。
产生core dump的可能原因:
(1) 内存访问越界;
(2) 多线程程序使用了线程不安全的函数;
(3) 多线程读写的数据未加锁保护;
(4) 非法指针;
(5) 堆栈溢出。
在Debug模式下编译
如果用命令行catkin_make,在输入catkin_make时加上一个参数:
catkin_make -DCMAKE_BUILD_TYPE=Debug
或者直接修改CMakelist.txt,添加以下代码:
SET(CMAKE_BUILD_TYPE "Debug")
SET(CMAKE_CXX_FLAGS_DEBUG "$ENV{CXXFLAGS} -O0 -Wall -g -ggdb")
SET(CMAKE_CXX_FLAGS_RELEASE "$ENV{CXXFLAGS} -O3 -Wall")
1、查看core dump是否打开,如果返回0代表没有打开,返回 unlimited 表示已经打开
ulimit -c
2、打开core dump
ulimit -c unlimited
执行这行命令之后,只针对当前终端有效。
如果想对所有终端都有效则在 .bashrc 末尾添加这行代码:
ulimit -c unlimited
3、生成可执行文件,要加-g选项,以获取到具体的行号信息,否则没有
g++ -g -o main main.c
4、执行程序后生成core文件,core文件默认放在可执行文件相同目录下,且文件名固定为core
./main
5、使用gdb调试core
gdb main core
6、查看程序堆栈信息
bt


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









