






传感器 时空对齐(标定)
部署
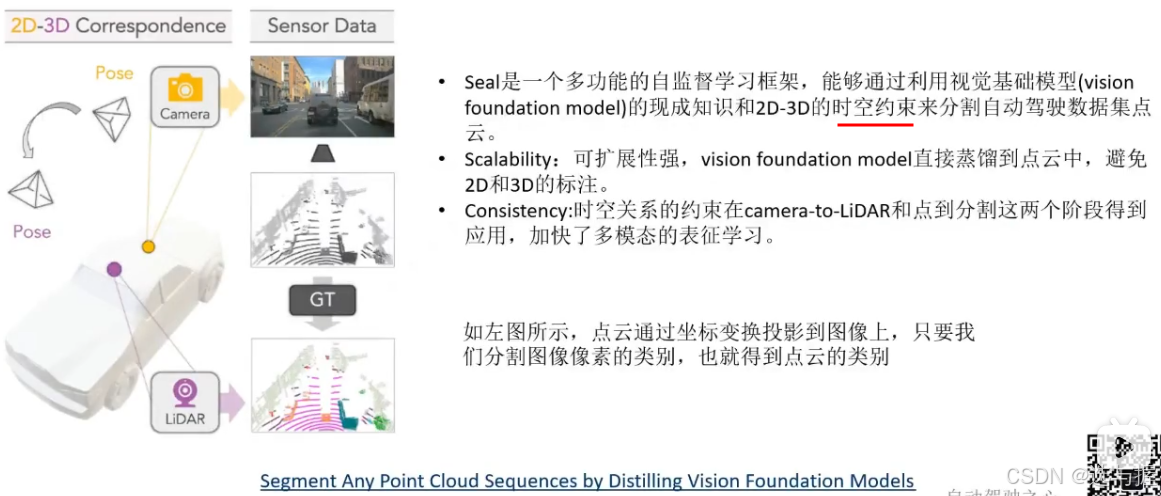
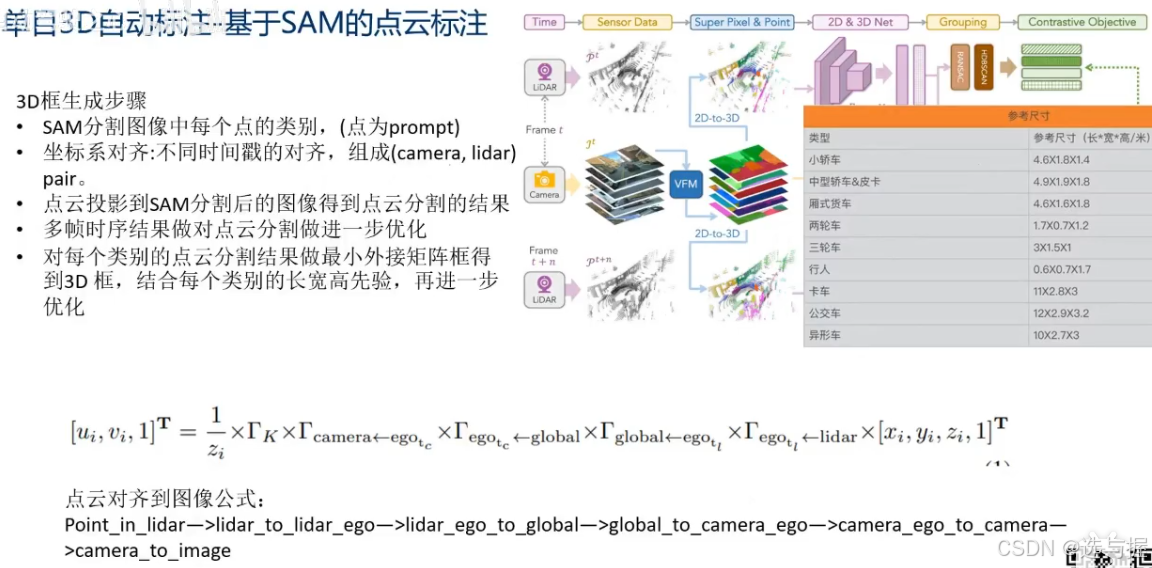
基于sam的点云分割
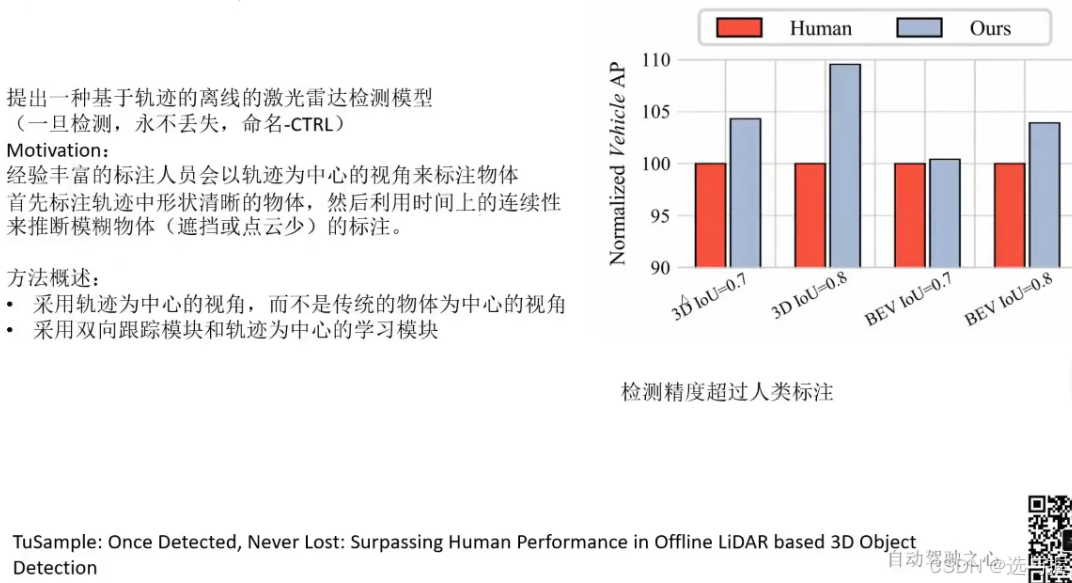
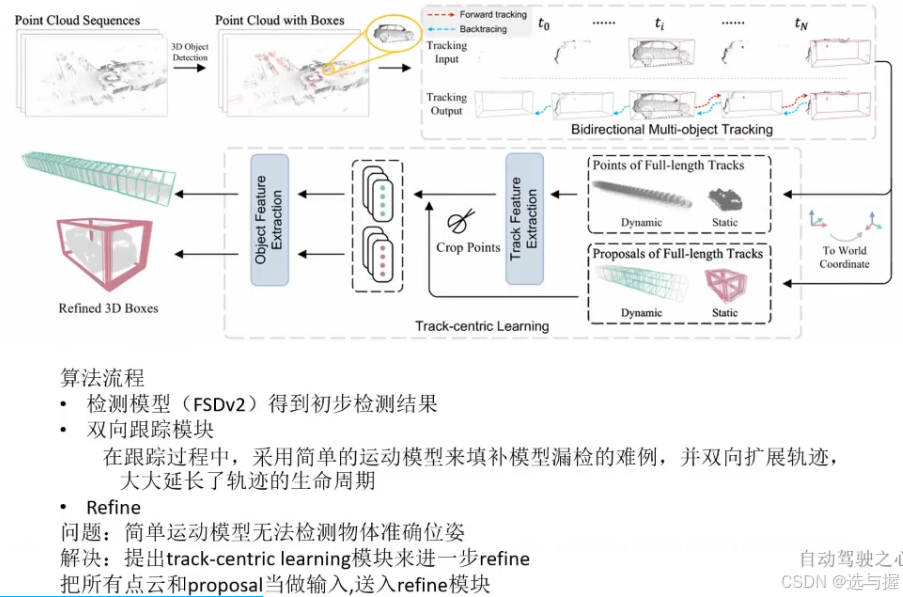
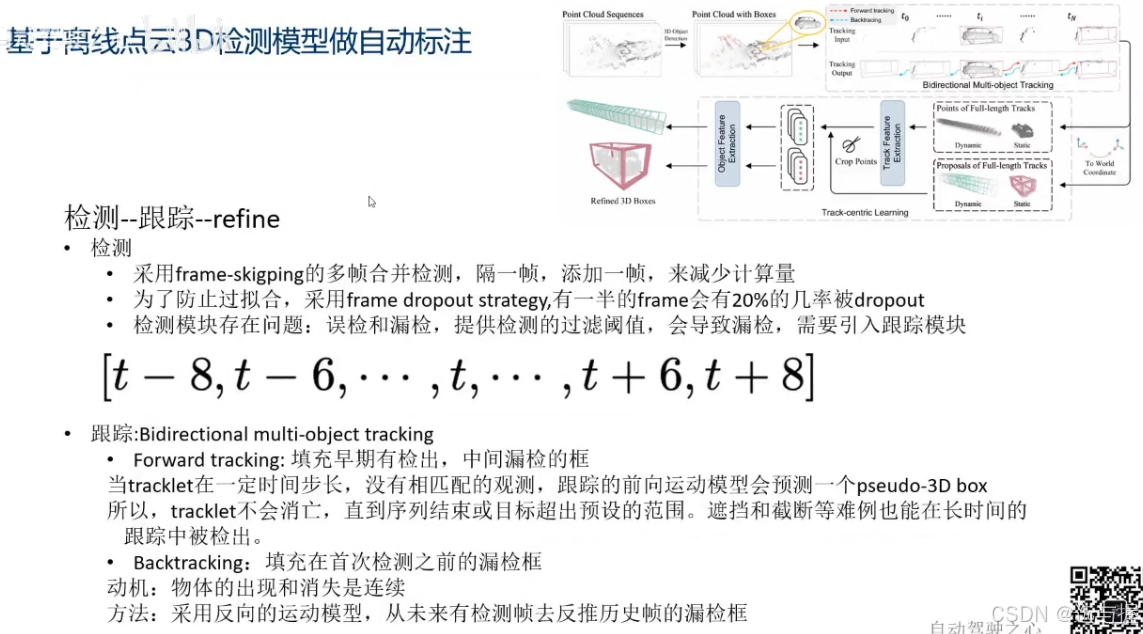
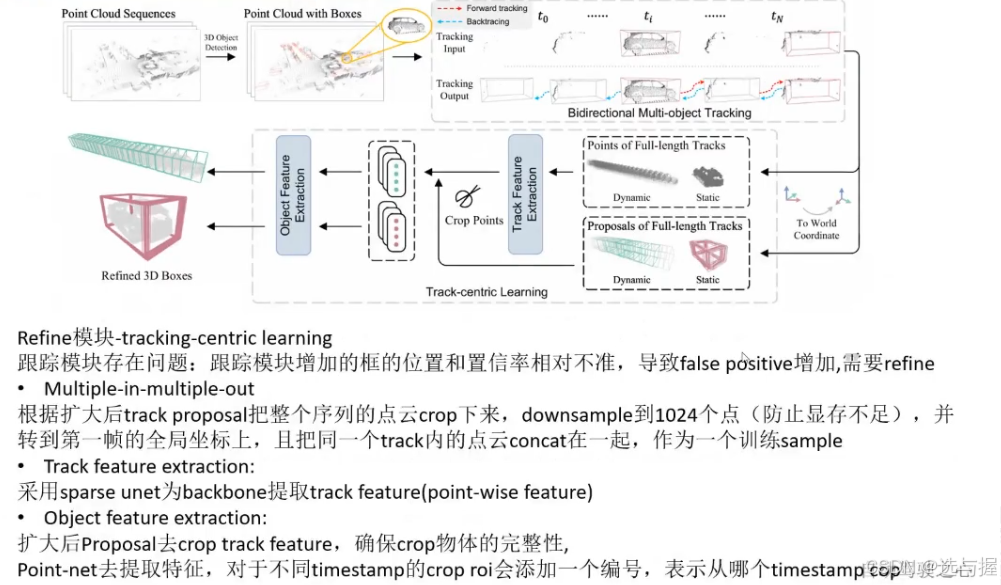
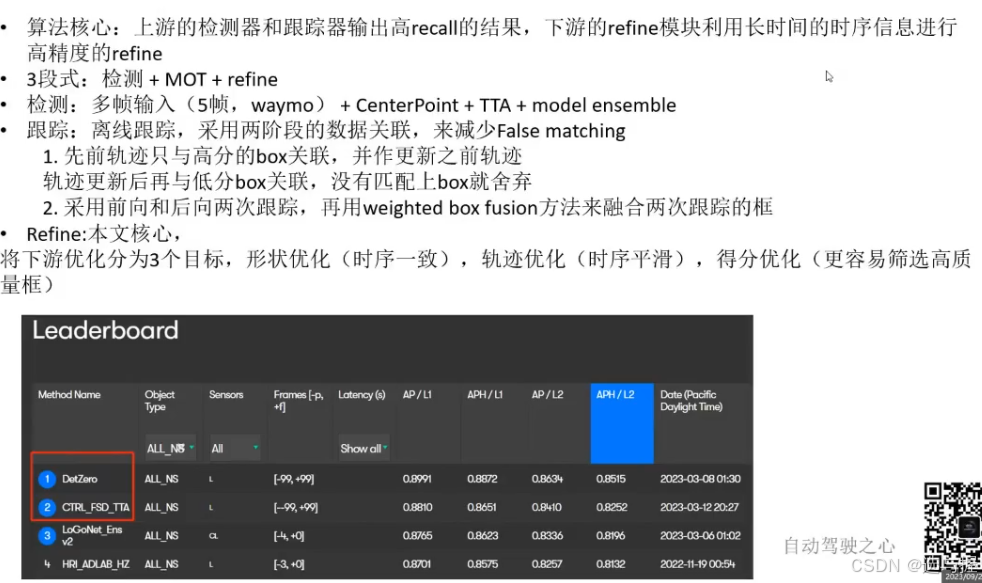
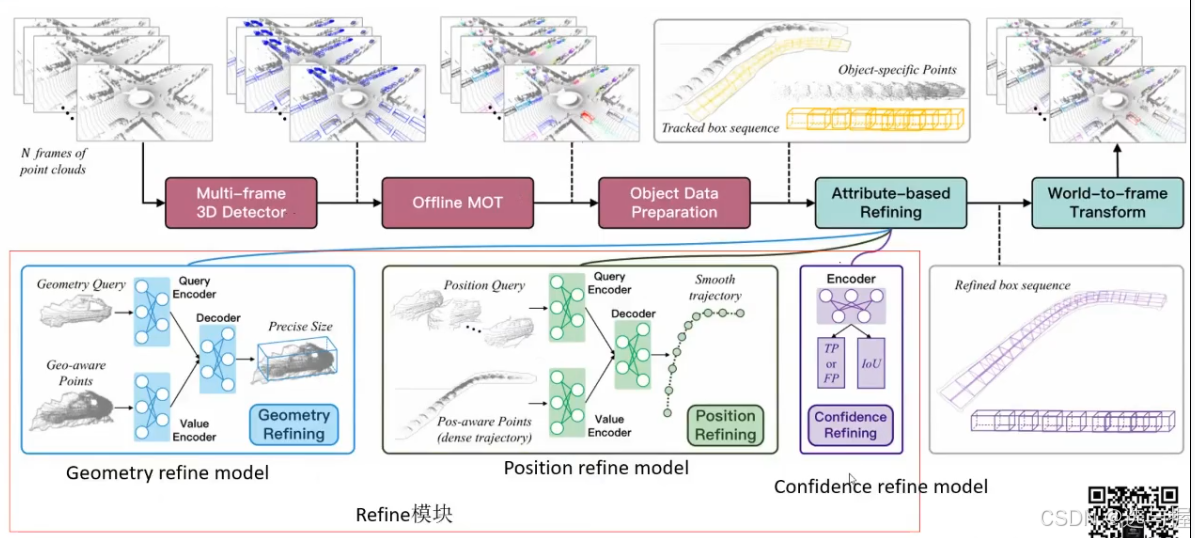
基于检测和跟踪对离线点云3D bbox自动标注
2D检测分割工具
labelme
labelimg
CVAT
VOTT
EISeg
RITM
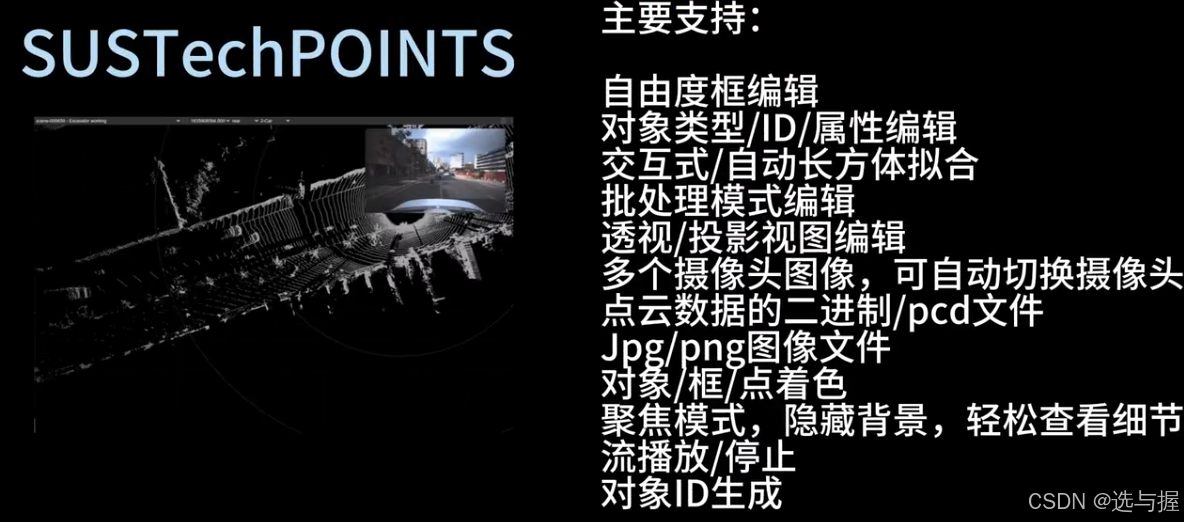
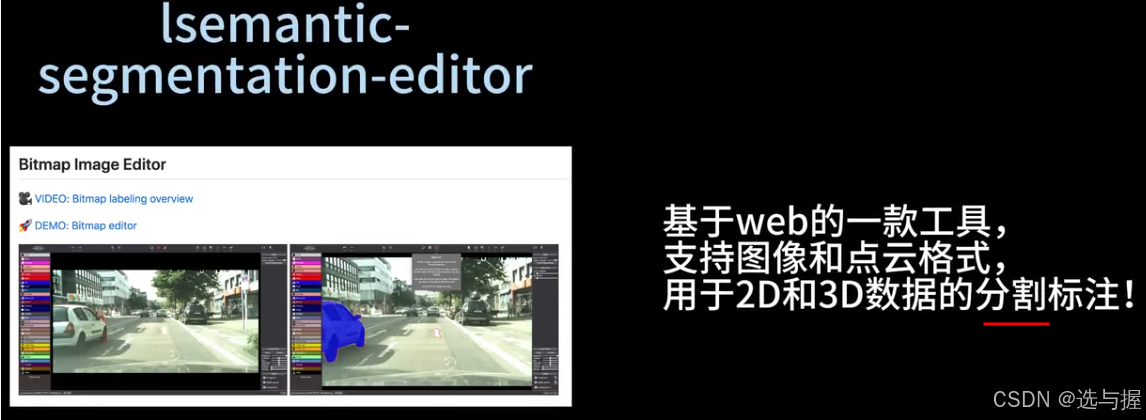
3D 检测分割标注工具


多传感器标定
OpenCalib

上海AI Lab维护,传感器标定是任何自主系统及其组成传感器的基础,在实现传感器融合之前必须正确执行。精确的校准对于进一步的处理步骤至关重要,例如传感器融合和障碍物检测、定位和mapping以及控制算法的实施。此外,传感器融合是自动驾驶应用中的重要任务之一,它融合从多个传感器获得的信息,以减少与单独使用传感器时相比的不确定性。为了解决自动驾驶汽车的传感器校准问题,OpenCalib提供了一个传感器标定工具箱。标定工具箱可用于标定IMU、激光雷达、相机和雷达等传感器。
https://github.com/PJLab-ADG/SensorsCalibration
ApolloCalib
Apollo推出的标定工具箱,支持在HMI模式下选择不同的车型:
- kitti_140 - KITTI dataset collection vehicle
- mkz_121 - vehicle for test
- mkz_example - vehicle for simulation
- mkz_lgsvl_321 - vehicle for lgsvl simulation
- nuscenes_165 - nuScenes dataset collection vehicle
https://github.com/ApolloAuto/apollo/tree/master/modules/calibration
AutowareCalib
autoware工具包自带的标定工具箱!
LivoxCalib
该解决方案提供了一种手动标定Livox LiDAR和相机之间外部参数的方法,该方法已在Mid-40、Horizon和Tele-15系列上进行了验证。其中包括相机固有参数的标定、标定数据的获取、相机与激光雷达之间固有参数的计算,以及相机与激光DAR融合应用的一些实例。在该解决方案中,板角被用作标定目标。Livox激光雷达具有不重复扫描的特点,可以更容易地在高密度点云中找到角点的准确位置。同时,我们可以获得更好的校准结果和更好的激光雷达相机融合。
https://github.com/Livox-SDK/livox_camera_lidar_calibration


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









