







 超级会员免费看
超级会员免费看
用PC端client接收roll.pitch和yaw的值,发现yaw的值会一直漂移,如下图:
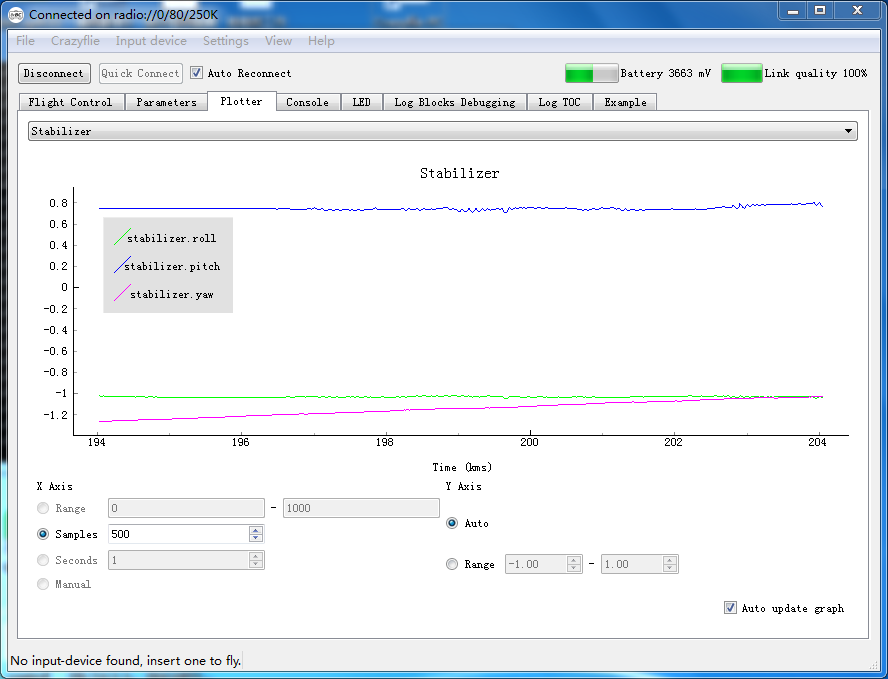
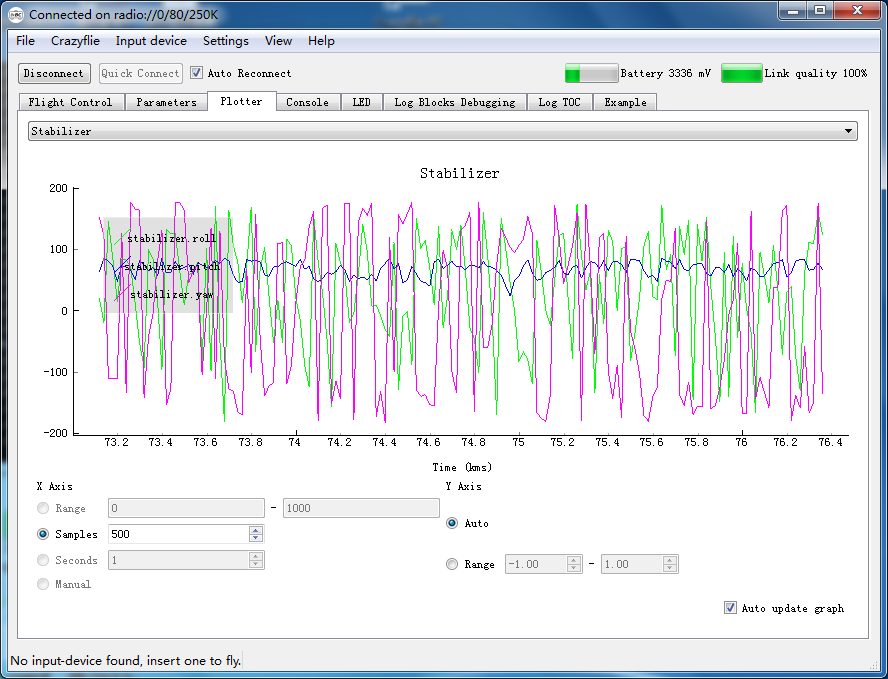
明显yaw的值一直在增大,虽然增加的不多,但是时间久了,方向就完全不对了;其实磁力计是可以弥补这样的漂移,目前crazyflie2.0中并没有融合磁力计,但是MPU9250已经支持磁力计了,所以就用Madgwick的算法尝试了下,但是看上去姿态解算更不对了,如下图,先记录下来以后接着研究。
 博客探讨了在使用crazyflie2.0无人机时,通过PC客户端观察到yaw角度存在持续漂移的问题。尽管MPU9250传感器理论上支持磁力计融合以校正这种漂移,但应用Madgwick算法后,姿态解算结果反而变得更不准确。作者计划对此进行进一步研究。
博客探讨了在使用crazyflie2.0无人机时,通过PC客户端观察到yaw角度存在持续漂移的问题。尽管MPU9250传感器理论上支持磁力计融合以校正这种漂移,但应用Madgwick算法后,姿态解算结果反而变得更不准确。作者计划对此进行进一步研究。
用PC端client接收roll.pitch和yaw的值,发现yaw的值会一直漂移,如下图:
明显yaw的值一直在增大,虽然增加的不多,但是时间久了,方向就完全不对了;其实磁力计是可以弥补这样的漂移,目前crazyflie2.0中并没有融合磁力计,但是MPU9250已经支持磁力计了,所以就用Madgwick的算法尝试了下,但是看上去姿态解算更不对了,如下图,先记录下来以后接着研究。

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




















 597
597







