







原创文章,欢迎转载。转载请注明:转载自 祥的博客
原文链接: http://blog.csdn.net/humanking7/article/details/45037239
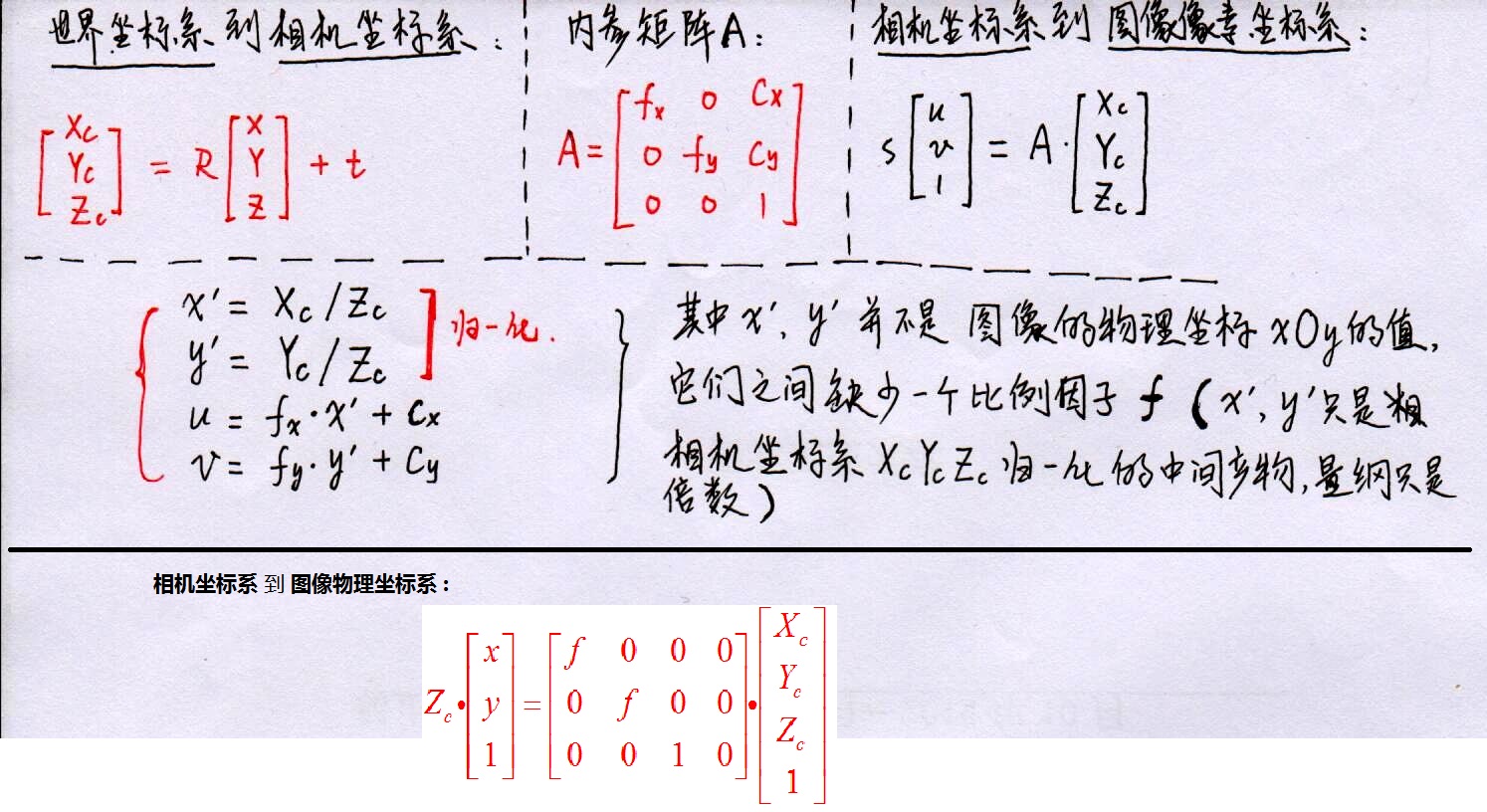
.摄像机成像原理简述
成像的过程实质上是几个坐标系的转换。首先空间中的一点由 世界坐标系 转换到 摄像机坐标系 ,然后再将其投影到成像平面 ( 图像物理坐标系 ) ,最后再将成像平面上的数据转换到图像平面 ( 图像像素坐标系 ) 。
详细的可以参考我之前的博客[图像]摄像机标定(1) 标定中的四个坐标系
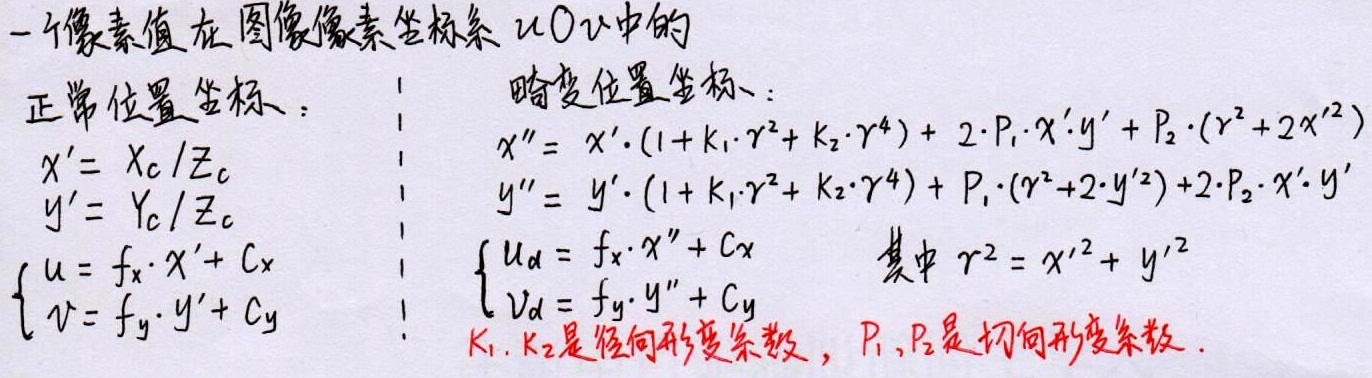
图像像素坐标系 (uOv坐标系) 下的无畸变坐标 (U, V),经过 经向畸变 和 切向畸变 后落在了uOv坐标系 的 (Ud, Vd) 上。即就是说,真实图像 imgR 与 畸变图像 imgD 之间的关系为: imgR(U, V) = imgD(Ud, Vd) 。
-
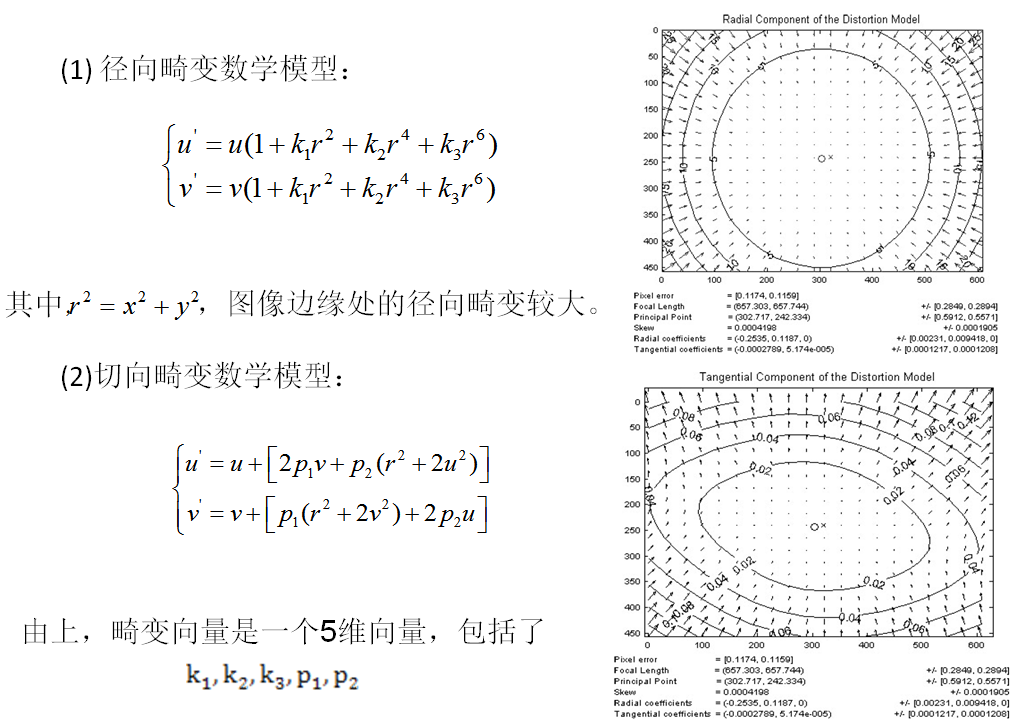
2.成像畸变
2.1. 畸变数学模型
摄像头成像畸变的数学模型
(符合的对应关系有问题,可能会造成一些干扰,公式主要看后面推导的过程)2.2. 公式推导
公式推导:
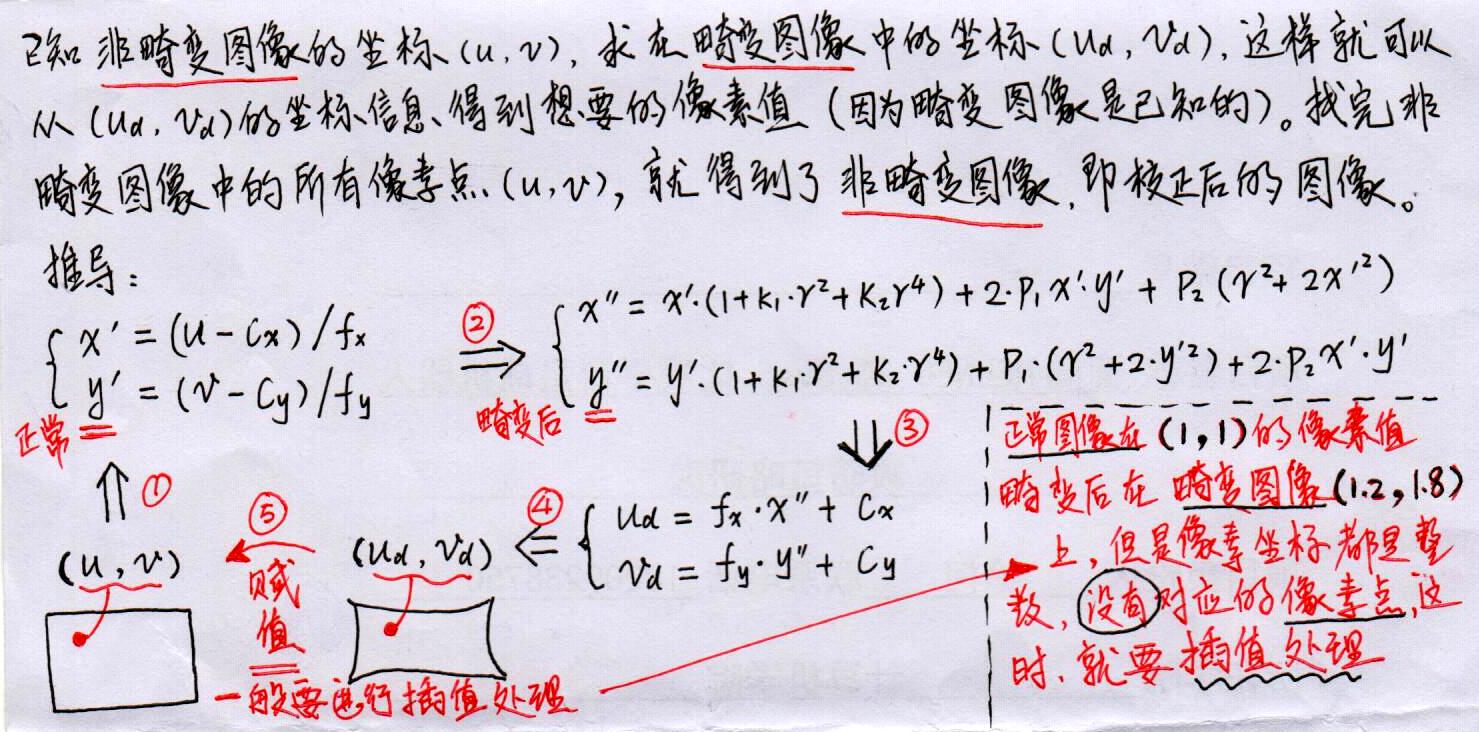
3.畸变校正
3.1. 理论推导
我们已知的是畸变后的图像,要得到没有畸变的图像就要通过畸变模型推导其映射关系。 真实图像 imgR 与畸变图像 imgD 之间的关系为:
imgR(U, V) = imgD(Ud, Vd)。通过这个关系,找出所有的imgR(U, V)。(U, V) 映射到 (Ud, Vd)中的(Ud, Vd)往往不是整数 (U和V是整数,因为它是我们要组成图像的像素坐标位置,以这正常图像的坐标位置去求在畸变图像中的坐标位置,取出对应的像素值,这也是正常图像的像素值)。 但是畸变的像素往往不是整数,所以需要通过插值来进行求解,详细见我之前的博客 [图像]图像缩放算法-双线性内插法 。3.2. 代码实现
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
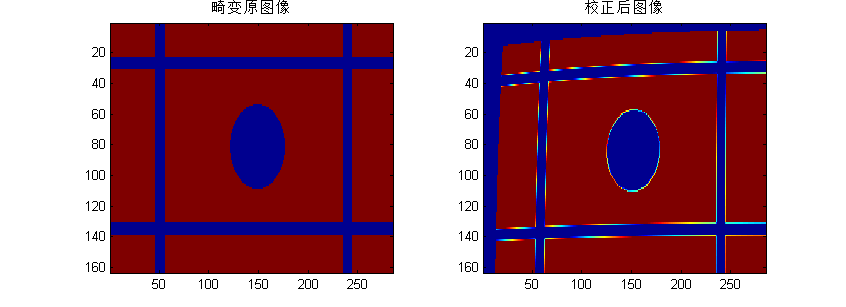
运行效果(摄像机内参是取网上的,图也是自己画的,图像本身没有参考价值):
版权声明:本文为博主原创文章,未经博主允许不得转载。

















 422
422

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









