







大家好,机器人视觉用的越来越普遍了,搬运,拆垛,涂胶,焊接等等应用都在使用视觉系统。
不少网友也在问我机器人和视觉系统怎么配合?程序怎么写?
这一期就简单来说说我所使用过的视觉系统。

目前我使用过的视觉系统基本有两大类:
1,拍摄图片,然后分析图片成像中的数据。
2,激光扫描,然后根据点云分析。
图片拍摄成像:如康耐视、基恩士等品牌的2D视觉。
有工业相机,也要工业镜头等等。这种视觉系统是通过标定将相机坐标系和机器人坐标系设置在同一位置,然后以此坐标系分析每次拍照的特征点对比学习点产生的偏差。
2D相机一般可以给出X,Y,A 三个方向数据,和一些用于检测结果判定的数据。并且X,Y,A一般为偏移值。其缺点是容易受到光线影响,镜头畸变、和景深也是对应用有效范围的限制 。

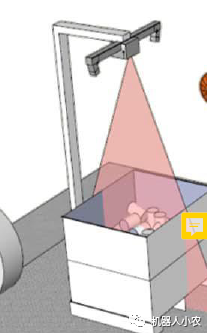
激光扫描点云分析:如康耐视,ISRA,等品牌的3D视觉。
这类视觉系统有更高的运算能力,它可以通过激光扫描出视野范围内的物体轮廓,识别出预先设定的物体的位置(绝对值)甚至能计算出机器人抓取所需要的tcp运动。
其价格要高于普通2D相机几倍。
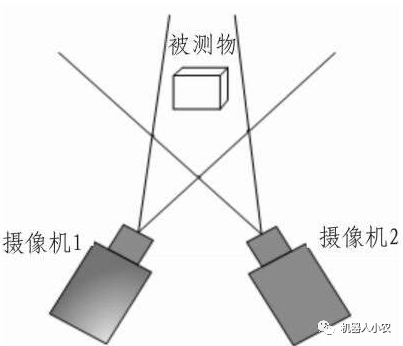
假3D:目前有很多利用两个单镜头来实现人眼3D效果。
这需要有很好的运算逻辑。并且这种3D不是非常的准确,精度要求不高的可以实现,但它的优点是价格相对3D便宜很多
以上是我所使用过的视觉种类,当今市场上各种各样的视觉系统,其原理也各不相同,所以我只能用我的经验来分享了,没用过的也不知道怎么用。

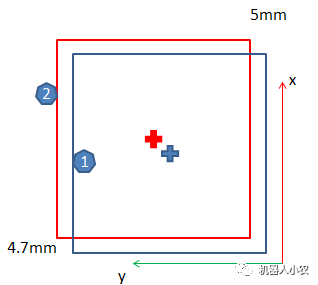
这一期我们先来说下2D的工作原理,先看下下面这张图
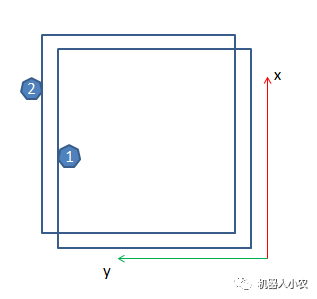
假如这是两次拍照的图片,1是用于标定学习的的图片,2为工作图片。两张图产生了位置变化,那么视觉系统会计算两个图片之间的误差。并且发送给机器人

如图经过视觉系统运算,在x方向比标定学习图偏差了4.7mm,
在y方向比标定学习图偏差了5mm
机器人接收到此数据后需要调整抓件点的位置,在x方向上+4.7,y方向上+5.
那么机器人的原始抓件位置在哪呢?
这个位置就是我没做好标定后需要进行的试教来完成的
如图:
蓝色+为最原始的试教抓件点
红色+为进行偏移补偿后的抓件点。
理解了吧,但是有人说,角度呢,2D视觉不是还可以识别出角度吗
2D相机一般是采集产品上的特征点,比如一个孔+一条边,或者十字线
我们把图上的+号作为相机采集的特征点。
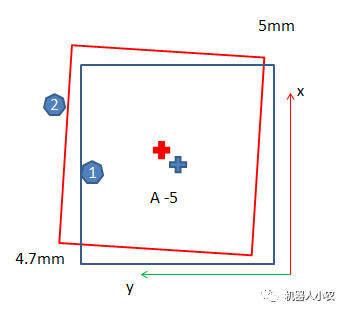
如图a旋转了-5度那么这个a的值我们可以加在点位上,也可以加在我们的基座标上。
但是很多人发现只要产生了角度就不能准确的抓取。这到底是为什么呢??
这个角度数据基本上是2D视觉成功与否的关键所在。
这里留着下期再继续写吧!!!!
长按二维码关注我,机器人小农。。。大家可以用微信关注这个公众号

个人的手机号不敢公布啊,怕被骚扰。还是发微信公众号吧,哈哈哈哈。经常会发技术文出来,大家共勉啊!!!
要买KUKA机器人也可以找我啊。。。我会转发给内部销售的。。。

















 1902
1902

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









