







背景
所有驱动开发都是基于全志T507(Android 10)进行开发,用于记录驱动开发过程。
简介
定时器是比较常用的一个功能,用来执行周期性任务。一般不太精确的定时可以用系统提供的延时函数进行。如果需要进行较为精确的延时,就要考虑使用系统内核提供的定时器中断。
在linux中ktime可以实现ms级定时,如果需要us、ns级就没法使用这个了(这个我们后续在讨论)。
驱动实现
首先在Linux驱动开发1 - Platform设备中已经实现了Platform设备驱动的编写,本文是基于这个驱动进行的定时器功能开发。
步骤1、配置时钟频率
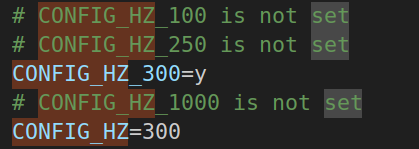
首先在内核中可以配置定时器中断周期,T507中默认配置为300HZ,即最大精度为3.33ms。如上图所示,timer最大支持的精度为1ms,可以通过启用CONFIG_HZ_1000进行设置。本文就以默认的300HZ频率为例。
也可以用make menuconfig在图形化界面进行配置。
配置文件路径为/kernel/linux-4.9/arch/arm64/configs/xxx
步骤2、实现platform_driver 结构体。
在longan/kernel/linux-4.9/drivers目录下创建自己的文件夹,定义一个timer_led_drv.c文件。
这里可以不用修改,只修改了驱动名称
/* platform驱动结构体 */
static struct platform_driver led_timer_driver = {
.driver = {
.name = "devledtimer", // 无设备树时,用于设备和驱动间的匹配
.of_match_table = led_timer_of_match, // 有设备树后,利用设备树匹配表
},
.probe = led_timer_probe,
.remove = led_timer_remove,
};在设备数创建设备节点。这里以PI0为例
led_timer {
compatible = "devledtimer";
pinctrl-names = "default";
status = "okay";
//pinctrl-0 = <&timer_led_pin_a>;
ledtimer {
gpios = <&pio PI 0 1 2 0 1>;
state = "on";
};
};在PIO节点下定义pinctrl_led_test节点,主要用于配置IO口。
soc@03000000 {
pio: pinctrl@0300b000 {
...
timer_led_pin_a: led_timer_grp@0 {
allwinner,pins = "PI0";
allwinner,function = "led_timer_grp";
allwinner,muxsel = <0x01>;
allwinner,drive = <0x00>;
allwinner,pull = <0x01>;
allwinner,data = <0x01>;
};
...
}
}步骤3、定义设备节点
主要定义一下led_timer_priv,用来存放节点信息,用于生成/dev/xxx节点。
这里用到了定时器,因此增加了timer_list和timeperiod用来启用定时器及控制定时器周期。
另外还用到了自旋锁,作用自己查资料,这里就不详述了。
/* 存放led信息的结构体 */
struct led_timer_data
{
char name[16]; // 设备名字
int pin; // gpio编号
int active; // 控制亮灭的标志
int enable; // 定时器使能标志位
};
/* 存放led的私有属性 */
struct led_timer_priv
{
struct cdev cdev; // cdev结构体
struct class *dev_class; // 自动创建设备节点的类
int num_leds; // led的数量
struct led_timer_data led; // 存放led信息的结构体数组
int timeperiod; // 定时周期
struct timer_list timer; // 定义一个定时器
spinlock_t lock; // 定义一个自旋锁
};步骤4、初始化设备
定义一个初始化方法gpio_led_probe,并绑定到步骤2中的.probe
static int led_timer_probe(struct platform_device *pdev)这个函数和 Linux驱动开发1 - Platform设备中gpio_led_probe一样。
parser_init_led_timer用于获取设备树中的节点信息,并进行初始化。
步骤5、移除设备
常规操作,将所有设备依次注销回收。
增加del_timer_sync(&priv->timer);用于在移除设备时删除定时器。
static int led_timer_remove(struct platform_device *pdev)
{
struct led_timer_priv *priv = platform_get_drvdata(pdev);
int i;
dev_t devno = MKDEV(dev_major, 0);
/* 注销设备结构体,class结构体和cdev结构体 */
for(i=0; i<priv->num_leds; i++)
{
devno = MKDEV(dev_major, i);
device_destroy(priv->dev_class, devno);
}
class_destroy(priv->dev_class);
cdev_del(&priv->cdev);
unregister_chrdev_region(MKDEV(dev_major, 0), priv->num_leds);
/* 将led的状态设置为灭 */
for (i = 0; i < priv->num_leds; i++)
{
gpio_set_value(priv->led.pin, 0);
}
del_timer_sync(&priv->timer);
printk("led_timer_ioctl success to remove driver[major=%d]!\n", dev_major);
return 0;
} 步骤6、字符设备描述file_operations
static struct file_operations led_fops =
{
.owner = THIS_MODULE,
.open = led_open,
.release = led_release,
.unlocked_ioctl = led_ioctl,
.compat_ioctl = led_timer_ioctl,
};实现led_open、led_release、led_ioctl。
在led_open中初始化自旋锁及初始化定时器timer。修改ioctl逻辑,增加定时器控制命令。
static int led_open(struct inode *inode, struct file *file)
{
struct led_timer_priv *priv;
priv = container_of(inode->i_cdev, struct led_timer_priv, cdev);
file->private_data = priv;
priv->timeperiod = 1000;
/* 初始化自旋锁 */
spin_lock_init(&priv->lock);
/* 初始化timer */
setup_timer(&priv->timer, timer_do_in_time, &priv->timer);
return 0;
}
static int led_release(struct inode *inode, struct file *file)
{
return 0;
}
static long led_timer_ioctl(struct file *file, unsigned int cmd, unsigned long arg)
{
struct led_timer_priv *priv;
priv = file->private_data;
unsigned int flags;
printk(">>>>> led_timer_ioctl command=%d arg=%ld\n", cmd, arg);
switch (cmd)
{
case 10:/* 关闭定时器 */
del_timer_sync(&priv->timer);
priv->led.enable = 0;
gpio_set_value(priv->led.pin, 0);
priv->led.active = 0;
printk(">>>>> led_timer_ioctl del_timer_sync\n");
break;
case 11:/* 打开定时器 */
del_timer_sync(&priv->timer);
mod_timer(&priv->timer, jiffies + msecs_to_jiffies(priv->timeperiod));
priv->led.enable = 1;
printk(">>>>> led_timer_ioctl mod_timer = %ld\n", jiffies);
break;
case 12:/* 设置定时器周期 */
spin_lock_irqsave(&priv->lock, flags);
priv->timeperiod = arg;
spin_unlock_irqrestore(&priv->lock, flags);
if (priv->led.enable == 0)
{
del_timer_sync(&priv->timer);
mod_timer(&priv->timer, jiffies + msecs_to_jiffies(priv->timeperiod));
priv->led.enable = 1;
}
printk(">>>>> led_timer_ioctl period = %d\n", priv->timeperiod);
break;
default:
printk("Ioctl command=%d can't be supported\n", cmd);
break;
}
return 0;
}实现定时器中断处理函数
void timer_do_in_time(unsigned long arg)
{
struct timer_list *mytimer = (struct timer_list *)arg;
struct led_timer_priv *priv = container_of(mytimer, struct led_timer_priv, timer);
// TODO 在这里处理需要做的事情
// 根据标志位处理是否重启定时器
if (priv->led.enable == 1)
{
mod_timer(&priv->timer, jiffies + msecs_to_jiffies(priv->timeperiod));
}
}步骤7、编译环境MakeFile
在自定义目录下创建Makefile文件。这里默认加载设备。
obj-y += timer_led_drv.o遇到的问题
问题1、中断函数中获取led_timer_priv结构体信息。
主要用container_of获取到内存中struct led_timer_priv *priv类型指针,然后使用priv中的led_timer_data或者timer进行操作。
源码
#include <linux/init.h>
#include <linux/module.h>
#include <linux/errno.h>
#include <linux/types.h>
#include <linux/kernel.h>
#include <linux/timer.h>
#include <linux/jiffies.h>
#include <linux/fs.h>
#include <linux/cdev.h>
#include <linux/device.h>
#include <linux/of_gpio.h>
#include <linux/platform_device.h>
#include <linux/gpio.h>
#include <linux/of_device.h>
#include <linux/slab.h>
#define LED_OFF 0
#define LED_ON 1
static int dev_major = 0;
/* 存放led信息的结构体 */
struct led_timer_data
{
char name[16]; // 设备名字
int pin; // gpio编号
int active; // 控制亮灭的标志
int enable; // 定时器使能标志位
};
/* 存放led的私有属性 */
struct led_timer_priv
{
struct cdev cdev; // cdev结构体
struct class *dev_class; // 自动创建设备节点的类
int num_leds; // led的数量
struct led_timer_data led; // 存放led信息的结构体数组
int timeperiod; // 定时周期
struct timer_list timer; // 定义一个定时器
spinlock_t lock; // 定义一个自旋锁
};
void timer_do_in_time(unsigned long arg)
{
struct timer_list *mytimer = (struct timer_list *)arg;
struct led_timer_priv *priv = container_of(mytimer, struct led_timer_priv, timer);
/* 每次都取反,实现LED灯反转 */
priv->led.active = !priv->led.active;
gpio_set_value(priv->led.pin, priv->led.active);
/* 重启定时器 */
if (priv->led.enable == 1)
{
mod_timer(&priv->timer, jiffies + msecs_to_jiffies(priv->timeperiod));
}
}
static inline int sizeof_led_timers_priv(int num_leds)
{
return sizeof(struct led_timer_priv) + (sizeof(struct led_timer_priv) * num_leds);
}
int parser_init_led_timer(struct platform_device *pdev)
{
struct device_node *np = pdev->dev.of_node; // 当前设备节点
struct device_node *child; // 当前设备节点的子节点
struct led_timer_priv *priv; // 存放私有属性
int num_leds, gpio; // led数量和gpio编号
num_leds = 1;
if(num_leds <= 0)
{
dev_err(&pdev->dev, "fail to find child node\n");
return -EINVAL;
}
priv = devm_kzalloc(&pdev->dev, sizeof_led_timers_priv(num_leds), GFP_KERNEL);
if (!priv)
{
return -ENOMEM;
}
priv->num_leds = 1;
/* 找到子节点并传给child */
child = of_get_child_by_name(np, "ledtimer");
/* 解析dts并且获取gpio口,函数返回值就得到gpio号,并且读取gpio现在的标志 */
gpio = of_get_named_gpio(child, "gpios", 0);
/* 将子节点的名字,传给私有属性结构体中的led信息结构体中的name属性 */
strncpy(priv->led.name, child->name, sizeof(priv->led.name));
printk(">>>>> led_timer_ioctl gpio=%d name=%s\n", gpio, priv->led.name);
/* 将gpio编号和控制亮灭的标志传给结构体
* active属性,1代表亮,0代表灭,初始属性为亮
*/
priv->led.active = 1;
priv->led.pin = gpio;
/* 申请gpio口,相较于gpio_request增加了gpio资源获取与释放功能 */
gpio_request(priv->led.pin, "ledtimer");
/* 设置gpio为输出模式,并设置初始状态 */
gpio_direction_output(priv->led.pin, 1);
/* 将led的私有属性放入platform_device结构体的device结构体中的私有数据中 */
platform_set_drvdata(pdev, priv);
return 0;
}
static int led_open(struct inode *inode, struct file *file)
{
struct led_timer_priv *priv;
priv = container_of(inode->i_cdev, struct led_timer_priv, cdev);
file->private_data = priv;
priv->timeperiod = 1000;
/* 初始化自旋锁 */
spin_lock_init(&priv->lock);
/* 初始化timer */
setup_timer(&priv->timer, timer_do_in_time, &priv->timer);
return 0;
}
static int led_release(struct inode *inode, struct file *file)
{
return 0;
}
static long led_timer_ioctl(struct file *file, unsigned int cmd, unsigned long arg)
{
struct led_timer_priv *priv;
priv = file->private_data;
unsigned int flags;
switch (cmd)
{
case 10:/* 关闭定时器 */
del_timer_sync(&priv->timer);
priv->led.enable = 0;
gpio_set_value(priv->led.pin, 0);
priv->led.active = 0;
break;
case 11:/* 打开定时器 */
del_timer_sync(&priv->timer);
mod_timer(&priv->timer, jiffies + msecs_to_jiffies(priv->timeperiod));
priv->led.enable = 1;
break;
case 12:/* 设置定时器周期 */
spin_lock_irqsave(&priv->lock, flags);
priv->timeperiod = arg;
spin_unlock_irqrestore(&priv->lock, flags);
if (priv->led.enable == 0)
{
del_timer_sync(&priv->timer);
mod_timer(&priv->timer, jiffies + msecs_to_jiffies(priv->timeperiod));
priv->led.enable = 1;
}
break;
default:
printk("Ioctl command=%d can't be supported\n", cmd);
break;
}
return 0;
}
static struct file_operations led_fops =
{
.owner = THIS_MODULE,
.open = led_open,
.release = led_release,
.unlocked_ioctl = led_timer_ioctl,
.compat_ioctl = led_timer_ioctl,
};
static int led_timer_probe(struct platform_device *pdev)
{
struct led_timer_priv *priv; // 临时存放私有属性的结构体
struct device *dev; // 设备结构体
dev_t devno; // 设备的主次设备号
int i, rv = 0;
/* 1)解析设备树并初始化led状态 */
rv = parser_init_led_timer(pdev);
if( rv < 0 )
return rv;
/* 将之前存入的私有属性,放入临时的结构体中 */
priv = platform_get_drvdata(pdev);
/* 2)分配主次设备号 */
if (0 != dev_major)
{
/* 静态分配主次设备号 */
devno = MKDEV(dev_major, 0);
rv = register_chrdev_region(devno, priv->num_leds, "devledtimer");
}
else
{
/* 动态分配主次设备号 */
rv = alloc_chrdev_region(&devno, 0, priv->num_leds, "devledtimer");
dev_major = MAJOR(devno);
}
if (rv < 0)
{
dev_err(&pdev->dev, "major can't be allocated\n");
return rv;
}
/* 3)分配cdev结构体 */
cdev_init(&priv->cdev, &led_fops);
priv->cdev.owner = THIS_MODULE;
rv = cdev_add (&priv->cdev, devno , priv->num_leds);
if( rv < 0)
{
dev_err(&pdev->dev, "struture cdev can't be allocated\n");
goto undo_major;
}
/* 4)创建类,实现自动创建设备节点 */
priv->dev_class = class_create(THIS_MODULE, "ledtimer");
if( IS_ERR(priv->dev_class) )
{
dev_err(&pdev->dev, "fail to create class\n");
rv = -ENOMEM;
goto undo_cdev;
}
/* 5)创建设备 */
for(i=0; i<priv->num_leds; i++)
{
devno = MKDEV(dev_major, i);
dev = device_create(priv->dev_class, NULL, devno, NULL, "ledtimer");
if( IS_ERR(dev) )
{
dev_err(&pdev->dev, "fail to create device\n");
rv = -ENOMEM;
goto undo_class;
}
}
printk("led_timer_ioctl success to install driver[major=%d]!\n", dev_major);
return 0;
undo_class:
class_destroy(priv->dev_class);
undo_cdev:
cdev_del(&priv->cdev);
undo_major:
unregister_chrdev_region(devno, priv->num_leds);
return rv;
}
static int led_timer_remove(struct platform_device *pdev)
{
struct led_timer_priv *priv = platform_get_drvdata(pdev);
int i;
dev_t devno = MKDEV(dev_major, 0);
/* 注销设备结构体,class结构体和cdev结构体 */
for(i=0; i<priv->num_leds; i++)
{
devno = MKDEV(dev_major, i);
device_destroy(priv->dev_class, devno);
}
class_destroy(priv->dev_class);
cdev_del(&priv->cdev);
unregister_chrdev_region(MKDEV(dev_major, 0), priv->num_leds);
/* 将led的状态设置为灭 */
for (i = 0; i < priv->num_leds; i++)
{
gpio_set_value(priv->led.pin, 0);
}
del_timer_sync(&priv->timer);
printk("led_timer_ioctl success to remove driver[major=%d]!\n", dev_major);
return 0;
}
/* 匹配列表 */
static const struct of_device_id led_timer_of_match[] = {
{ .compatible = "devledtimer" },
{}
};
MODULE_DEVICE_TABLE(of, led_timer_of_match);
/* platform驱动结构体 */
static struct platform_driver led_timer_driver = {
.driver = {
.name = "devledtimer", // 无设备树时,用于设备和驱动间的匹配
.of_match_table = led_timer_of_match, // 有设备树后,利用设备树匹配表
},
.probe = led_timer_probe,
.remove = led_timer_remove,
};
module_platform_driver(led_timer_driver);
MODULE_LICENSE("GPL");
















 726
726

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









