







1、安装usb_cam包
pip install pydantic==1.10.14
sudo apt install ros-humble-usb-cam
# 测试打开相机
ros2 launch usb_cam camera.launch.py
# 显示图像
ros2 run image_view image_view image:=/camera1/image_raw2、安装 camera_calibration
sudo apt install ros-humble-camera-calibration3、执行标定程序
ros2 run camera_calibration cameracalibrator --size 9x6 --square 0.026 image:=/camera1/image_raw camera:=/usb_cam参数说明:
- --size 当前标定板大小
- --square 每个小棋盘格的边长,单位米
- image:=/camera1/image_raw 图像来源主题
- camera:=/usb_cam 相机名称
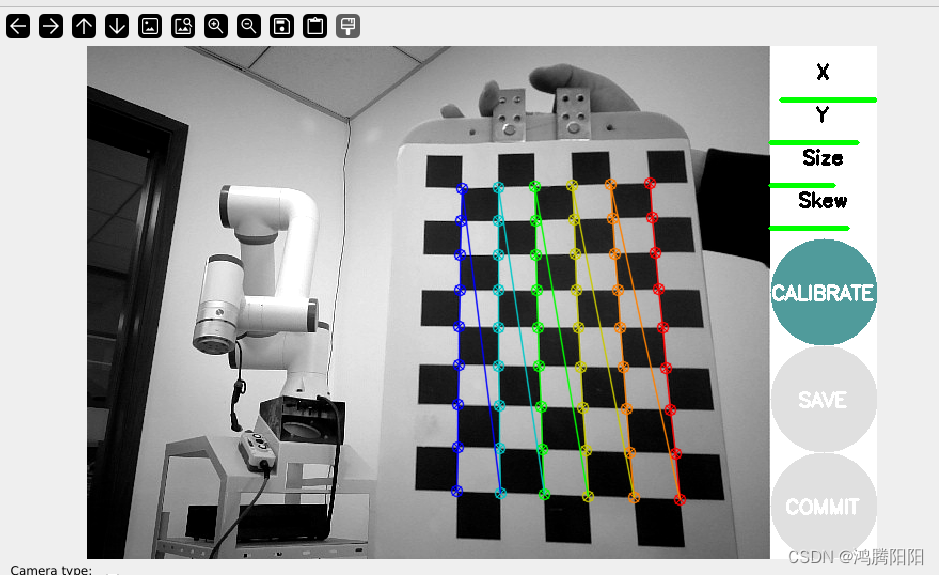
4、通过不停的移动标定板:直到X、Y、Size、Skew四个都变成绿色,点击CALIBRATE按钮;
完成后可点击“save”进行保存,文件保存路径在终端里有显示。再次将标定板放在视野里时,右上角会出现一个数值,代表标定误差。
5、点击SAVE按钮
结果以压缩包形式保存在:/tmp/calibrationdata.tar.gz中。
image_width: 640
image_height: 480
camera_name: narrow_stereo
camera_matrix:
rows: 3
cols: 3
data: [620.78764, 0. , 301.03635,
0. , 623.18712, 249.98162,
0. , 0. , 1. ]
distortion_model: plumb_bob
distortion_coefficients:
rows: 1
cols: 5
data: [0.156418, -0.248802, 0.003859, -0.003760, 0.000000]
rectification_matrix:
rows: 3
cols: 3
data: [1., 0., 0.,
0., 1., 0.,
0., 0., 1.]
projection_matrix:
rows: 3
cols: 4
data: [635.97443, 0. , 298.43981, 0. ,
0. , 638.92316, 251.00522, 0. ,
0. , 0. , 1. , 0. ]image_height、image_width:图片的高、宽
camera_name:摄像头名
camera_matrix:摄像头的内部参数矩阵
distortion_model:畸变模型
distortion_coefficients:畸变模型的系数
rectification_matrix:为矫正矩阵,一般为单位阵
projection_matrix:为外部世界坐标到像平面的投影矩阵

















 8887
8887

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









