






基于lqr的主动悬架控制与被动悬架的性能仿真表现(matlabsimulink)对比,模型为四分之一模型。
扰动输入,有简单视频讲解,配套的本程序对应内容资料(伦纹)
YID:95100677788484940
mpc跟踪控制
标题:基于LQR的主动悬架控制与被动悬架的性能仿真表现对比
摘要:本文针对车辆悬架系统的控制问题展开研究,以四分之一模型为基础,使用MATLAB Simulink进行性能仿真比较。具体比较了基于线性二次调节器(LQR)的主动悬架控制与传统的被动悬架系统在面对扰动输入时的表现。同时,附带简明视频讲解和配套的本程序对应内容资料,为技术研究和应用提供参考。
-
引言
车辆悬架系统是车辆控制中的重要组成部分,它的性能直接影响了车辆的操控性、驾驶舒适性以及安全性等方面。传统的被动悬架系统存在着扰动输入时响应不及时、对路面不同类型的适应性差等问题。随着控制理论的发展,基于LQR的主动悬架控制被广泛应用于车辆悬架系统中,以提升车辆性能和驾乘舒适度。 -
方法介绍
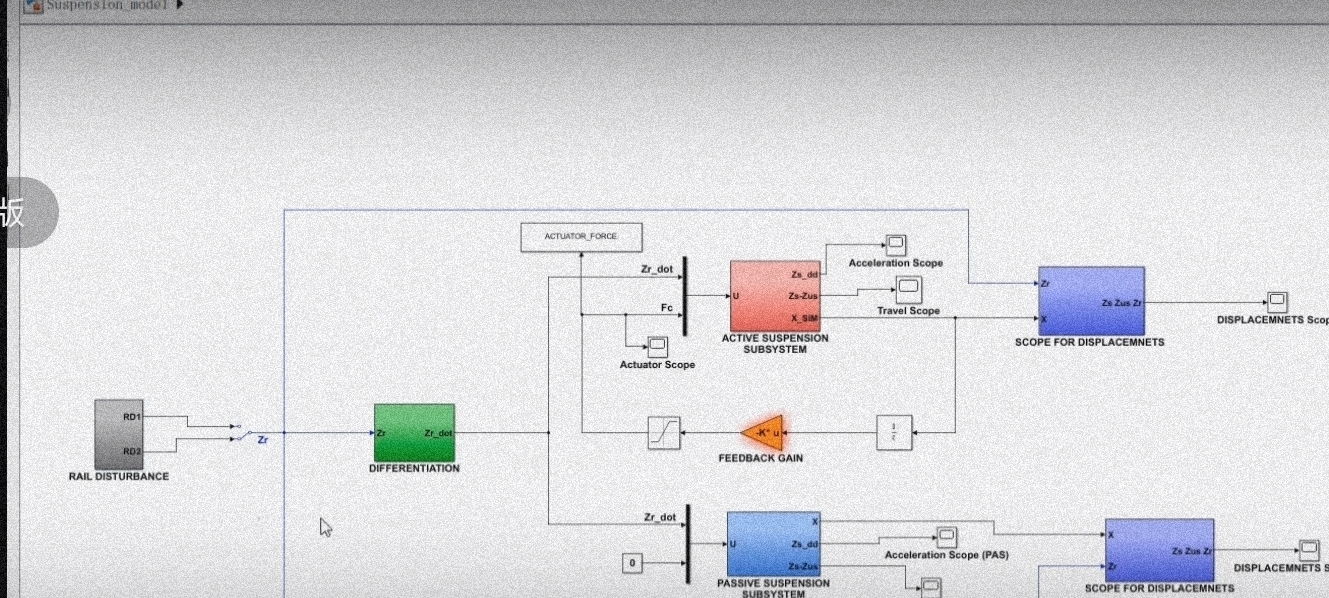
本文选择四分之一模型作为研究对象,并使用MATLAB Simulink进行系统建模与仿真。主动悬架控制系统和被动悬架系统在同一输入条件下进行仿真对比。其中,主动悬架系统采用基于LQR的控制策略,而被动悬架系统则由传统阻尼元件构成。 -
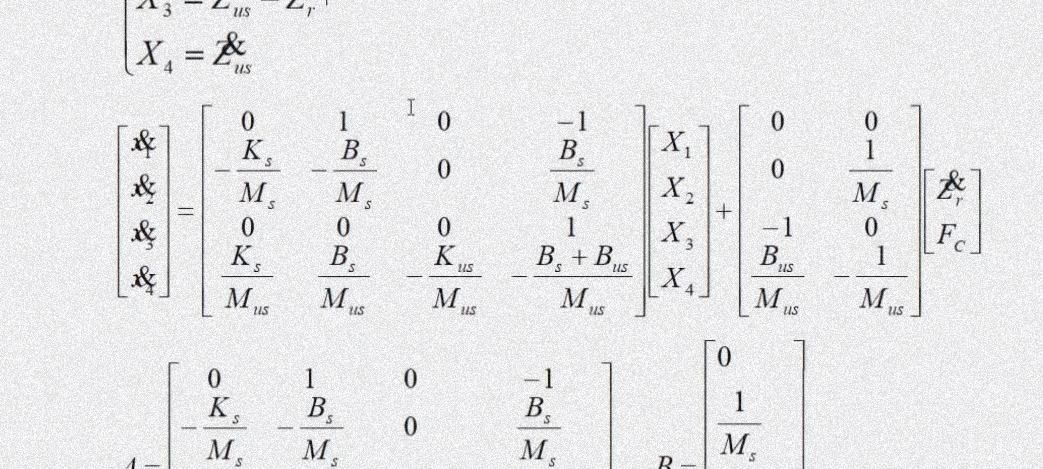
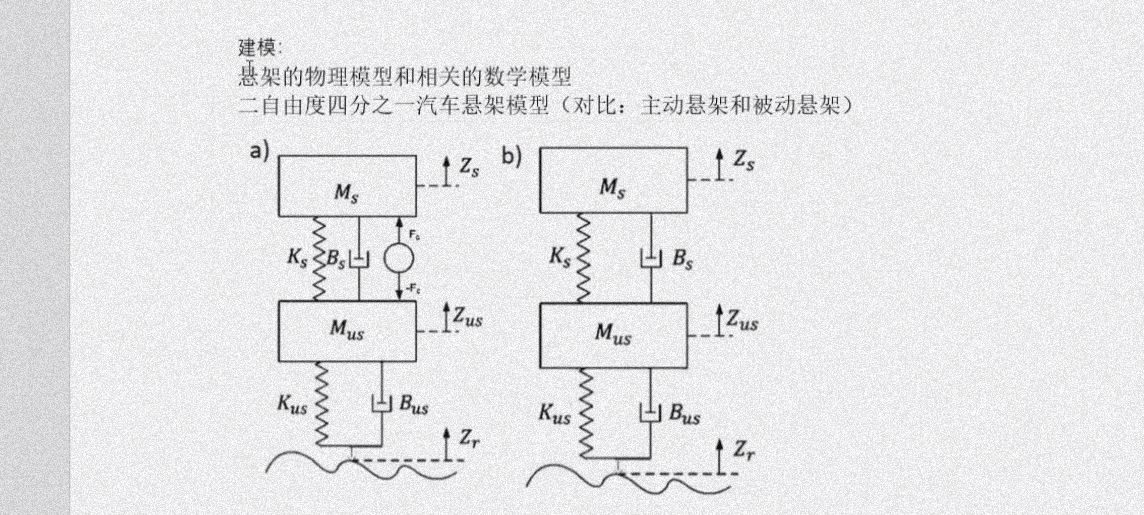
模型建立
在四分之一模型中,考虑了车辆的质量、弹簧、减振器等元件,并根据实际情况进行参数设定。通过建立各个元件之间的数学关系,构建了系统的数学模型。 -
LQR控制器设计
LQR控制器作为一种最优控制方法,通过线性化系统模型并定义性能指标,得到满足最优性能的状态反馈控制器。在仿真中,我们根据系统特点和需求设计了适用于主动悬架系统的LQR控制器,并使用Simulink进行验证和调整。 -
性能仿真对比
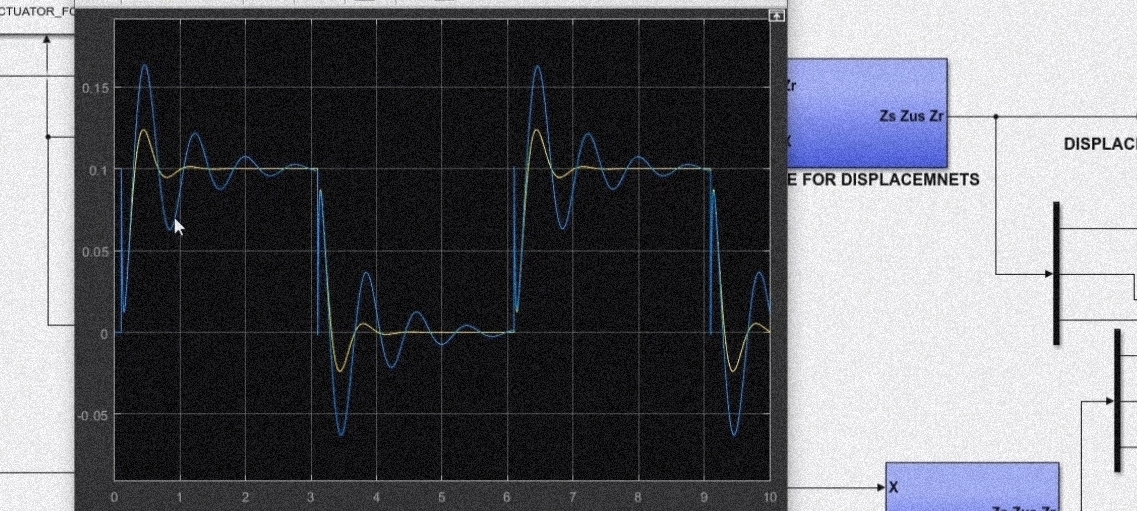
基于LQR的主动悬架控制系统和传统的被动悬架系统在同一扰动输入下进行了性能仿真对比。通过对比系统的减振效果、车辆的悬架位移、车身加速度等指标,评估了两种系统在提升悬架响应速度和舒适度方面的差异。 -
结果分析与讨论
通过对仿真结果的分析,我们发现基于LQR的主动悬架控制系统在面对扰动输入时具有更好的响应速度和调节能力。相较于传统的被动悬架系统,主动悬架系统能够更快地调整悬架刚度和阻尼,以实现更好的悬架位移和车身加速度控制效果。 -
实验验证与应用前景展望
为了验证仿真结果的可靠性,我们计划进行实际车辆的实验验证。此外,基于LQR的主动悬架控制技术在车辆工程领域具有广泛应用前景,在提升乘坐舒适度、驾驶稳定性和安全性等方面有着重要作用。
结论:本文通过基于LQR的主动悬架控制与传统的被动悬架系统的性能仿真对比,发现基于LQR的主动悬架控制系统在响应速度和调节能力方面具有优势。该研究为车辆悬架系统的控制提供了新的思路和技术支持,有望在实际应用中提升车辆性能和驾乘舒适度。
关键词:主动悬架控制、被动悬架、LQR、四分之一模型、MATLAB Simulink、性能仿真、扰动输入、舒适度、响应速度、调节能力
相关的代码,程序地址如下:http://matup.cn/677788484940.html
















 2485
2485











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









