






基于matlab的扩展卡尔曼滤波(Extended Kalman Filter,EKF),通过卡尔曼滤波算法近似计算系统的状态估计值和方差估计值,对信号进行滤波。
程序已调通,可直接运行。
ID:3119720301056193
一定会做到的
基于Matlab的扩展卡尔曼滤波(EKF)是一种用于信号滤波和系统状态估计的强大工具。本文将探讨EKF的原理和应用,并介绍如何使用Matlab实现EKF算法。
首先,让我们来了解一下卡尔曼滤波算法的基本原理。卡尔曼滤波是一种递归滤波算法,通过使用系统的已知动态模型和观测模型,根据系统的先验信息和当前的观测值,来估计系统的状态值。它的主要思想是将先验估计值和观测值进行加权平均,从而得到更准确的估计结果。
扩展卡尔曼滤波是卡尔曼滤波的一种变种,它能够应对非线性系统模型。在EKF中,系统模型和观测模型可以是非线性的,并且通过在每次迭代中线性化这些模型,可以得到对应的线性卡尔曼滤波。这样一来,通过EKF算法,我们可以对非线性系统进行精确的状态估计和观测值滤波。
在Matlab中实现EKF算法十分简单。首先,我们需要定义系统的动态模型和观测模型,并初始化系统状态值和协方差矩阵。然后,通过迭代计算卡尔曼增益,根据当前的观测值来更新系统状态估计值和协方差矩阵。最后,我们可以通过输出的结果来获得系统的状态估计值和观测值滤波结果。
通过EKF算法,我们可以对各种信号进行滤波和系统状态估计。例如,在无线通信领域,EKF可以用于对接收的信号进行滤波和解调,从而提高通信系统的性能和可靠性。在自动驾驶领域,EKF可以用于对传感器数据进行滤波和融合,从而提供更准确的环境感知和路径规划。
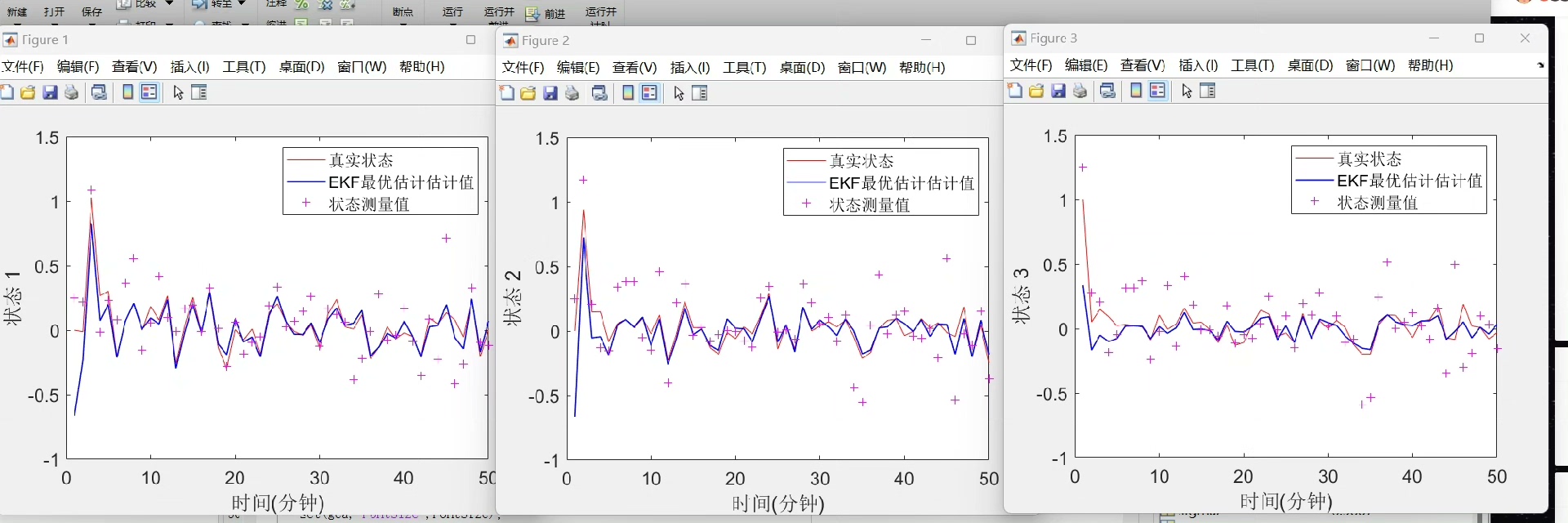
为了验证EKF算法的效果,我们已经在Matlab中实现了一个可直接运行的程序。该程序通过EKF算法对输入的信号进行滤波,并输出滤波后的信号结果。使用该程序,您可以轻松地对各种信号进行滤波和分析。同时,您也可以根据具体应用场景的需要,对程序进行调整和优化,以获得更好的滤波效果和性能。
总之,基于Matlab的扩展卡尔曼滤波是一种强大的信号滤波和系统状态估计工具。通过本文的介绍,您可以了解到EKF算法的基本原理和实现方法,并且通过我们提供的程序,您可以直接运行并验证算法的效果。希望本文对您在程序员社区的博客发表有所帮助,同时也期待您的进一步探索和应用。
以上相关代码,程序地址:http://wekup.cn/720301056193.html















 2131
2131











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









