









matlab仿真-卡尔曼滤波与扩展卡尔曼滤波
近期由于毕设需要,学习推导了卡尔曼滤波和扩展卡尔曼滤波(KF,EKF),在此做一个记录,不做理论上的推导,只做仿真记录。
一、卡尔曼滤波器
(一)理论简述
卡尔曼滤波简单来说就是使用测量到的量测结果对本地预测结果,根据一定比例,进行修正的过程,其基本公式包含五个:
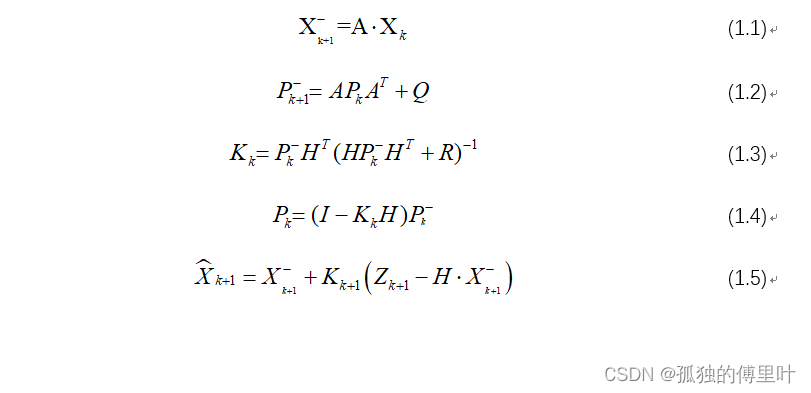
对这个过程进行一遍详细解读:卡尔曼滤波分为两个部分——时间更新和状态更新。
- 1、时间更新过程就是根据本地信息进行预测,参见式1和式2。 Xk表示上一时刻系统状态,A称为状态转移矩阵, Xk+1表示本地对当前时刻状态的预测。在这个基础上,我们计算先验估计的协方差矩阵Pk+1- ,它只和状态转移矩阵A、上一时刻协方差矩阵Pk 、过程激励噪声协方差矩阵Q有关。
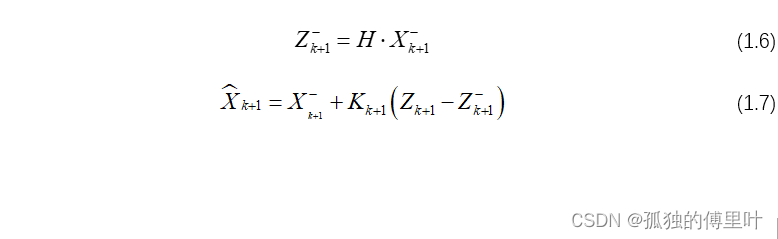
PS,(1)k+1时刻的先验估计协方差Pk+1-,这个协方差矩阵只要确定了一开始的P0,后面都可以递推出来,而且初始协方差矩阵P只要不是为0,它的取值对滤波效果影响很小,都能很快收敛;(2)过程激励噪声认为是状态转移矩阵与实际过程之间的误差,在仿真阶段一般可以把它看成一个简单的高斯噪声叠加上,也可以理解为对预测结果的信任程度,比如我的目标在y轴运动不太均匀,但是我把它简单看成匀速运动了,那么我对我在y轴的目标运动预测结果就不太信任,就可以把其对应的协方差值增大。 - 2、状态更新过程就是测到一个量测值了,即传感器传回来这时候的测量值后,对前面本地预测的结果进行修正。为了方便理解,可以把式5转换为两个式,如下。要结合预测的状态和量测,我们的状态要转换成量测的形式才能和量测比较,对预测的状态经过式6转换为预测的量测,再将差乘以卡尔曼增益K,用以修正先验估计Xk+1-,此时得到后验估计Xk+1 。
PS,(1)R表示观测噪声协方差矩阵,可以理解为仪器误差,同样可以看成对量测的信任程度,例如如果运动目标携带的速度传感器特别精准,可以将对应的协方差值减小;(2)卡尔曼增益K与先验估计协方差P-存在一定关系,如果先验估计误差特别大,那么估计不可信,模型应当加大对量测的信任程度,也就是增加K值;反之减小K值。
由于本篇只介绍其应用,就不仔细推导了。下面以仿真案例介绍其使用方法:
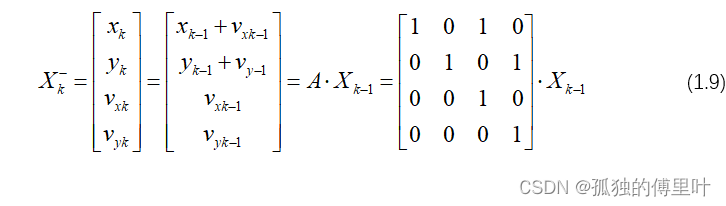
假设一个水下航行器,自身带有一个测量位置的传感器,预设该航行器在一个二维平面做直线运动:

设状态向量
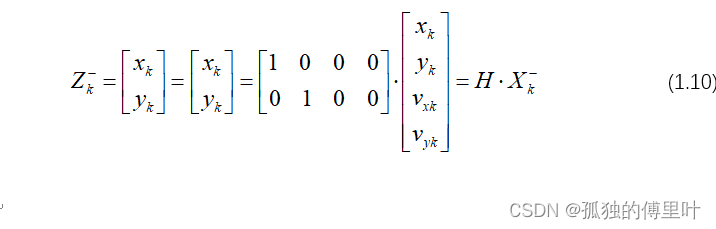
量测
(二)仿真:
%% CSDN_kf
clear all;clc; close all;
%% 初始化
tf = 500; %时刻
Q = diag(ones(4, 1) * 0.1);%预测噪声协方差矩阵Q:假设预测过程上叠加一个高斯噪声,协方差矩阵为Q
R = diag(ones(2, 1) * 0.2);%观测噪声协方差矩阵R:假设观测过程上存在一个高斯噪声,协方差矩阵为R
P =eye(4);
X=zeros(4,tf); %X表示目标现在的实际状态X=[X,Y,VX,VY]
Xnew=zeros(4,tf); %Xnew表示目标状态的后验估计值
X(:,1)=[1;7;1;2]; %按照y=2x+5初始化
Xnew(:,1)=X(:,1);
Z=zeros(2,tf); %Z表示测得的量测值Z=[X,Y]
Z(:,1)=[1;7];
z_=zeros(2,tf);
z_(:,1)=Z(:,1); %z_表示预测的量测,即从估计的状态转换过来的量测
%%
for k = 2 : tf
%% %%%%%%%%%%%%%%%%模拟系统%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
w=sqrt(0.1)*randn(4,tf);%模拟航行器在水下航行受到的扰动
X(:,k) =[k;2*k+5;1;2]+w(:,k);
v=sqrt(0.2)*randn(2,tf);%模拟量测在测量中受到的扰动
Z(:,k) =[k;2*k+5]+v(:,k);%模拟的测得的量测
%% %%%%%%%%%%%%%%%%EKF开始%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
A=[1,0,1,0;0,1,0,1;0,0,1,0;0,0,0,1];%状态转移矩阵,xk对xk-1求导
Xpre =A*Xnew(:,k-1); %先验估计,即预测值
H =[1,0,0,0;0,1,0,0];%量测矩阵
z_ =H*Xpre; %预测的量测
PP=A*P*A'+Q; %先验估计协方差矩阵
Kk=PP*H'*inv(H*PP*H'+R); %卡尔曼增益
Xnew(:,k)=Xpre+Kk*(Z(:,k)-z_); %后验估计
P=PP-Kk*H*PP; %后验估计误差协方差矩阵
end
t = 2 : tf;
figure;
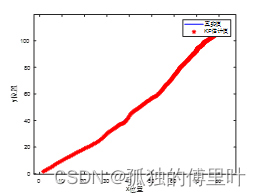
plot(X(1,t),X(2,t),'b',Xnew(1,t),Xnew(2,t),'r*');
xlabel('x位置');ylabel('y位置');
legend('真实值','KF估计值');
仿真结果 :

二、扩展卡尔曼滤波器
(一)理论简述
在此基础上,做扩展卡尔曼滤波的仿真。在上面我们可以发现,k+1时刻状态与k时刻状态必须呈现线性关系,量测与状态之间也是,但是目标呈线性关系还是较少的,我们以抛物线运动为例,仿真一下扩展卡尔曼滤波(EKF)。
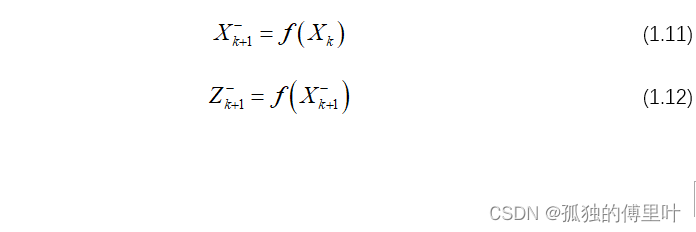
扩展卡尔曼是将这种非线性的函数使用泰勒展开,并只保留其一次项,以作近似。

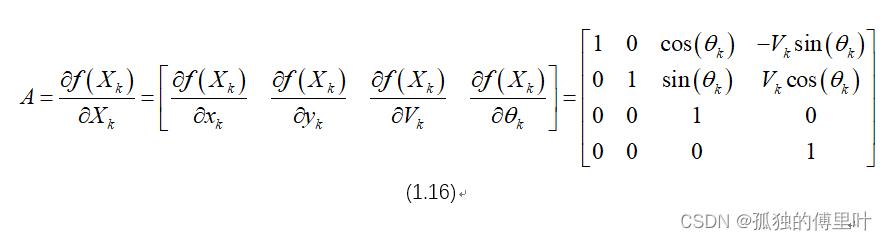
所以,将式1换为式11,式6换为式12,并将状态转换矩阵A和量测矩阵H换为以下:
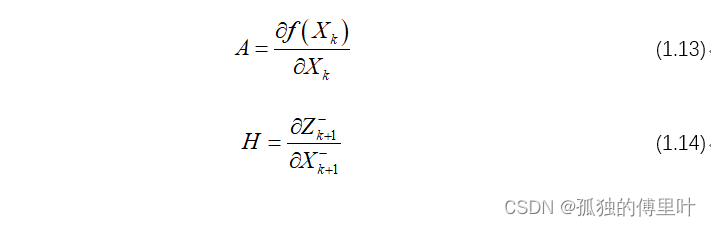
仿真:设状态向量如下
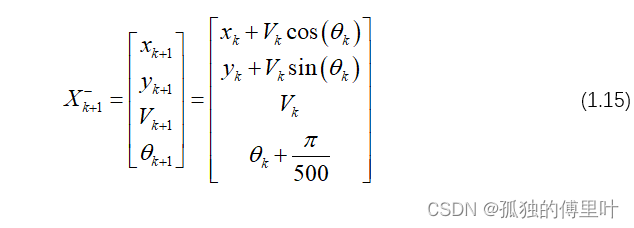
所以状态转移矩阵
量测(这里为了使用EKF,一时没想到合适的量测,胡乱设置的量测,没有什么物理意义)


(二)仿真:
仿真代码如下:
%% CSDN_ekf
clear all;clc; close all;
%% 初始化
tf = 500; %时刻
Q = diag(ones(4, 1) * 0.001);%预测噪声协方差矩阵Q:假设预测过程上叠加一个高斯噪声,协方差矩阵为Q
R = diag(ones(2, 1) * 0.02);%观测噪声协方差矩阵R:假设观测过程上存在一个高斯噪声,协方差矩阵为R
P =eye(4);
X=zeros(4,tf); %X表示目标现在的实际状态X=[X,Y,VX,VY]
Xnew=zeros(4,tf); %Xnew表示目标状态的后验估计值
X(:,1)=[1;1;1;pi/4]; %按照y=2x+5初始化
Xnew(:,1)=X(:,1);
Z=zeros(2,tf); %Z表示测得的量测值Z=[f(X,V),f(Y,theta)]
Z(:,1)=[1/10+1;1+pi/4];
z_=zeros(2,tf);
z_(:,1)=Z(:,1); %z_表示预测的量测,即从估计的状态转换过来的量测
%%
for k = 2 : tf
%% %%%%%%%%%%%%%%%%模拟系统%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
w=sqrt(0.001)*randn(4,tf);%模拟航行器在水下航行受到的扰动
X(:,k) =[X(1,k-1)+X(3,k-1)*cos(X(4,k-1));X(2,k-1)+X(3,k-1)*sin(X(4,k-1));X(3,k-1);X(4,k-1)]+w(:,k);
v=sqrt(0.02)*randn(2,tf);%模拟量测在测量中受到的扰动
Z(:,k) =[X(1,k)^2/10+X(3,k);X(2,k)+X(4,k)]++v(:,k);%模拟的测得的量测
%% %%%%%%%%%%%%%%%%EKF开始%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
Xpre =[Xnew(1,k-1)+X(3,k-1)*cos(Xnew(4,k-1));Xnew(2,k-1)+Xnew(3,k-1)*sin(Xnew(4,k-1));Xnew(3,k-1);Xnew(4,k-1)]; %先验估计,即预测值
A=[1,0,cos(Xnew(4,k-1)),-Xnew(3,k-1)*sin(Xnew(4,k));0,1,-sin(Xnew(4,k-1)),Xnew(3,k-1)*cos(Xnew(4,k));0,0,1,0;0,0,0,1];%状态转移矩阵,xk对xk-1求导
H =[Xpre(1)/5,0,1,0;0,1,0,1];%量测矩阵
z_ =[Xpre(1)^2/10+Xpre(3);Xpre(2)+Xpre(4)]; %预测的量测
PP=A*P*A'+Q; %先验估计协方差矩阵
Kk=PP*H'*inv(H*PP*H'+R); %卡尔曼增益
Xnew(:,k)=Xpre+Kk*(Z(:,k)-z_); %后验估计
P=PP-Kk*H*PP; %后验估计误差协方差矩阵
end
t = 2 : tf;
figure;
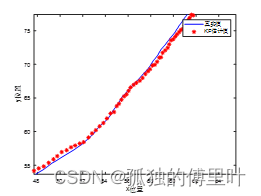
plot(X(1,t),X(2,t),'b',Xnew(1,t),Xnew(2,t),'r*');
xlabel('x位置');ylabel('y位置');
legend('真实值','KF估计值');
仿真结果:
















 2144
2144











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











