







最近在公司实习,都说跨入职场是让人进步最快的方式,记录一下我自学加同学指点学到新知识。
一、PCA9685简介
PCA9685是一个基于IIC通信的16路PWM输出模块,可以在单片机资源不足的情况下进行扩展使用。
i2c通信,只需要2根i2c线就可以控制16路pwm,周期和占空比都可控。
可以多个模块级联。箭头部分可以更改设备id。
可以控制16路输出端的开、关、pwm以及占空比。
二、硬件
1、电压
数字电路电压范围可接受3.3和5v电平。此外还有一个v+引脚,这个引脚是给舵机供电用的,可以接稍微高一点的电压。
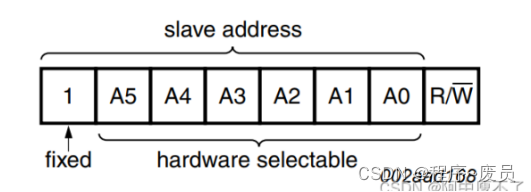
2、i2c地址
有6个地址控制脚,通过这些引脚可以控制设备的i2c地址。
7位的I2C地址为:0x40 + A5:A0,A5到A0如果不做任何处理的话是0,想要把哪一位置1就把那个引脚焊到一起。
另外用i2cdetect检测出还有一个0x70地址一直存在,这是一个通用地址,可以给所有从机下达指令。
3、使能脚
模块有一个OE反使能脚,这个引脚低电平使能,不接的话模块内部默认已经接地使能了,所以正常使用可以不接。
在使用PCA9685的时候需要注意以下几点:
1.PCA9685的分辨率是12位,即占空比控制时,0-4096对应的占空比为0-100,在控制舵机的时候,控制信号是0.5ms-2.5ms,周期20ms,所以控制舵机角度不会有太高的分辨率,对舵机控制精度较高的地方不建议使用。
PCA9685地址位和很多描述的不一样,根据芯片手册,地址位的寄存器一共8位,其中最高位固定是1,A0-A5这六位是用户可更改的,而其中最关键的一位是R/W位,这一位主要是决定了读还是写,置1时为读,置0时为写,所以我们在写程序的时候,PCA9685的地址应把R/W位加上,是0x80,而不是0x40,在写的时候,发送地址位是0x80,在读的时候,发送的地址位是0x81。
4. 频率
16路PWM 的频率都是一样的, 由prescale PWM 波长设定. 舵机控制所需的 PWM 周期为20 ms. 在用 PCA9685 作为多舵机控制器时,需要将 其 PWM 输出周期设定为20 ms,即PWM 波的频率设定为50 Hz,PCA9685 输出频率与振荡器有关,频率的 设置值
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 8398
8398

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









