







 本文详细介绍了遥感技术的各个方面,包括遥感平台的分类(地面、航空、航天)及其特点,如气象卫星和人造地球卫星等。讨论了遥感平台的姿态及其测定方法,以及遥感卫星的轨道类型。此外,还深入探讨了遥感传感器的类型、组成和性能,如摄影型、扫描型和微波成像类传感器。内容涵盖了传感器的工作原理、波谱分辨率、辐射分辨率和时间分辨率等关键参数。最后,提到了微波传感器在全天候、全天时工作和穿透能力方面的优势。
本文详细介绍了遥感技术的各个方面,包括遥感平台的分类(地面、航空、航天)及其特点,如气象卫星和人造地球卫星等。讨论了遥感平台的姿态及其测定方法,以及遥感卫星的轨道类型。此外,还深入探讨了遥感传感器的类型、组成和性能,如摄影型、扫描型和微波成像类传感器。内容涵盖了传感器的工作原理、波谱分辨率、辐射分辨率和时间分辨率等关键参数。最后,提到了微波传感器在全天候、全天时工作和穿透能力方面的优势。
遥感原理与应用读书笔记
遥感平台
遥感平台的类型
- 分为地面平台、航空平台、航天平台
- 高度最高的平台是气象卫星GMS(geostationary meteorological satellite,地球静止气象卫星)索塞表的静止卫星;其次是高度为700~900km的 Landsat, SPOT, MOS等地球观测卫星
地面平台
- 置于地面或水上的装在传感器的固定或移动装置,高度在100m以下
- 近距离测量地物波谱和摄取供试验研究用的地物细节影响
- 为航空遥感和航天遥感定标、校准和信息提取提供基础数据
航空平台
- 主要指高度在30km以内的遥感平台,包括飞机和气球两种类型
- 飞机
- 低空平台(飞行高度小于2000m),获得大比例尺、中等比例尺航空遥感影像,直升机是最常用的低空遥感平台;侦察飞机可以进行300—500m的低空遥感;一般的遥感试验通常在1000一1500m高度范围内进行
- 中空平台(飞行高度在2000—6000m)为轻型飞机;较大比例尺遥感影像,为区域资源勘察、环境监测和制图等提供遥感数据
- 高空平台(飞行高度在12000—30000m)
- 气球
- 最早用于航空摄影的低空平台
- 携带照相机、摄像机、红外辐射计
- 低空气球(发送到对流层【12km以下】),最高高度达到5km
- 高空气球(发送到平流层),能在一恒定的气压高度漂浮,所以又称自由式遥感气球
- 无人机
- 固定翼型无人机(矿山资源监测、林业和草场监测、海洋环境监测、污染源及扩散态势监测
) - 无人驾驶直升机【起降场地的要求不高,但结构复杂,操控难度大】(突发事件的调查,如单体滑坡勘查、火山环境的监测)
- 固定翼型无人机(矿山资源监测、林业和草场监测、海洋环境监测、污染源及扩散态势监测
航天平台
- 定义:指高度在150km以上的人造地球卫星、宇宙飞船、空间轨道站、高空探测火箭、航天飞机等遥感平台
- 高空探测火箭:火箭上升时冲击强烈,易损坏仪器,且成本高、所获资料少,不是理想的遥感平台
- 人造地球卫星:不需要供给燃料和其他物资,费用低廉
- 低高度、短寿命卫星:以军事侦察为主要目的(分辨率高,资源详查、军事侦察)
- 中高度、长寿命卫星:大部分遥感对地卫星(陆地卫星、海洋卫星、气象卫星),目前遥感卫星的主体(资源调查、环境监测)
- 高高度、长寿命卫星:也称为地球同步卫星,被用于通信、气象、地面动态监测(火山、地震、森林火灾、洪水)(重复探测,观测周期短,大范围动态监测)
- 宇宙飞船 (spaceship),缺点是飞行时间短,飞越同一地区上空的重复率少
- 航天飞机 (space shuttle)——目前只有美国真正用过,且整个航天飞机计划于2011年7月21日宣告结束,亚特兰蒂斯号是最后一次飞行的航天飞机
- 轨道空间站
遥感平台的姿态
遥感平台的姿态
- 三轴倾斜
- 指遥感平台在飞行过程中发生的滚动(rolling)、俯仰(nitching)和偏航(yawing)现象
- 振动
- 除滚动、俯仰与偏航以外的非系统性的不稳定振动现象
遥感平台姿态的测定
- 位置、倾斜等时间性变化对扫描图像有很大的影响 --> 必须在平台上搭载姿态测量传感器和记录仪。
- 飞机平台姿态测量仪器(速度表、高度表、陀螺罗盘、多普勒雷达、GPS、陀螺水平仪、飞行记录器等)
- 卫星平台姿态测量仪器
- 确定卫星姿态的常用方法–>测定姿态角
- 利用姿态测量传感器
- 两台姿态测量仪+测量偏航的陀螺仪
- 例如:AMS(红外姿态测量);IKONOS卫星上使用的恒星跟踪仪和激光陀螺
- 利用GPS测定姿态需要将3台GPS接收机装在成像仪上,且同时接受4颗以上的GPS卫星信号,解算出3个姿态角
- 利用星相机
- 星相机和地相机组装在一起,在对地成像的同时,星相机对恒星摄影,并精确记录卫星运行时刻,再根据星历表、相机标准光轴指向等数据解算姿态角,但要求每次至少要摄取3颗以上的恒星。
- 利用姿态测量传感器
- 确定卫星姿态的常用方法–>测定姿态角
遥感卫星轨道及其类型
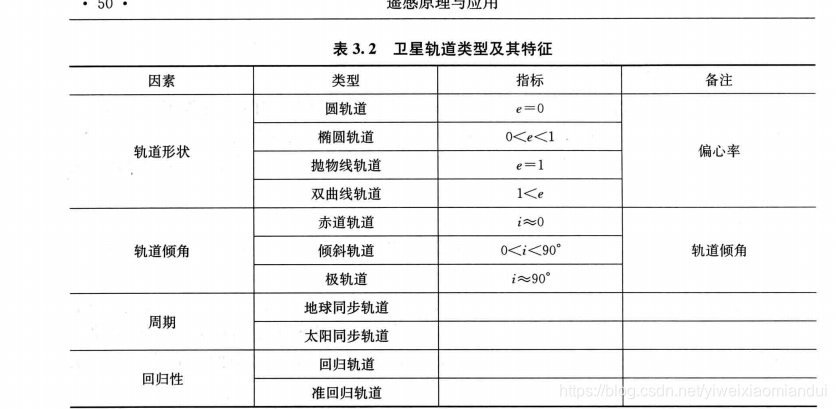
地球同步轨道
太阳同步轨道
- 太阳同步轨道指卫星轨道面绕地球的自转轴旋转,旋转方向及其周期与地球的公转方向及其周期相等的转道
- 近极轨卫星、采用近级轨道、近圆轨道
- 在一段时间内获取包括南北极在内的覆盖全球的遥感影像
- 太阳光入射角几乎固定,对于利用太阳反射光的被动式传感器来说,可以在近似相同的光照条件下,获取同一地区不同时间的遥感影像,对监测同一地区的地表变化非常有益(例如获取北京2000年12月11日和2020年12月11日的绿化情况进行比较)
- 近极轨卫星每天在同一地方时同一方向通过处于同一纬度地区
- 太阳同步轨道有回归轨道和准回归轨道之分。回归轨道是指卫星星下点的轨迹每天通过同一地点的轨道;而每N天通过的情况称为准回归轨道。要覆盖整个地球适于采用准回归轨道
遥感传感器
传感器概述
传感器类型
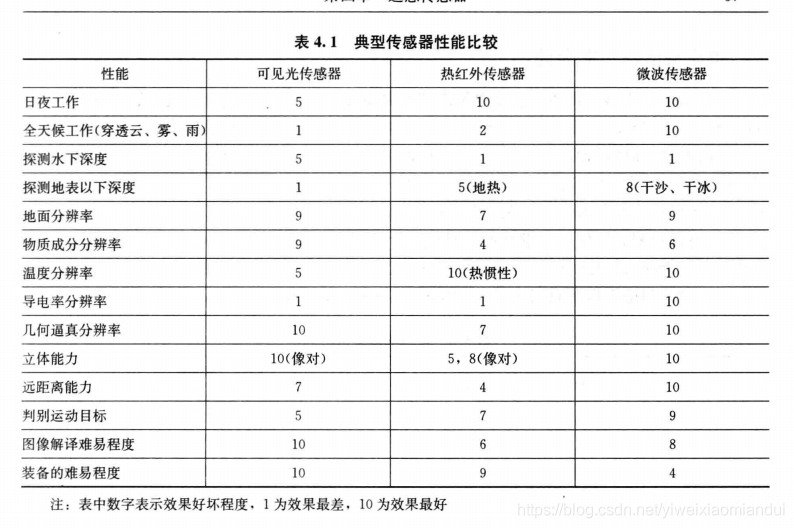
基本传感器的三种类型:可见光传感器(摄影机、扫描仪)、热红外传感器(扫描仪)和微波传感器(合成孔径雷达)
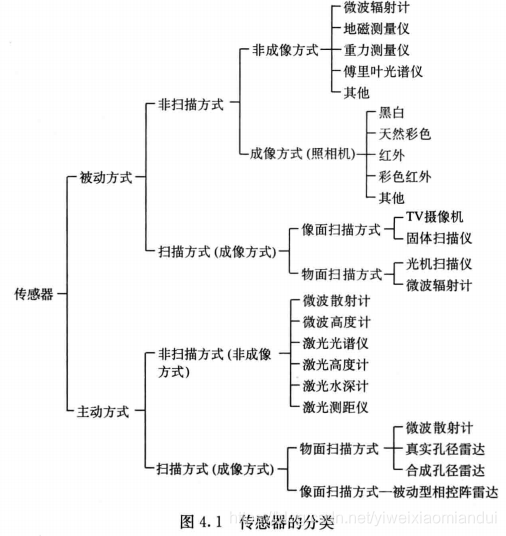
- 按电磁波辐射来源分类
- 主动式传感器和被动式传感器
- 按传感器的成像原理和所获取图像的性质
- 摄影机 (框幅式,缝隙式,全景式), 扫描仪 (光机扫描仪,推帚式扫描仪) 和雷达(真实孔径雷达、合成孔径雷达)
- 按传感器对电磁波信息的记录方式分类
- 成像方式、非成像方式的传感器
- 按传感器相应波长的不同分类
- 光场传感器【可见光】、热场传感器【中红外、热红外波段】、微波传感器【微波波段】
传感器的组成
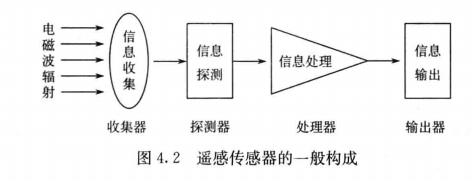
- 收集器(收集来自地物的辐射能量)
- 最基本的收集元件:透镜组(摄影机)、反射镜组(扫描仪)、天线(雷达)
- 如果是多波段遥感,其收集系统中包含按波段分波束的元件,如滤色镜、棱镜、光栅、分光镜、滤光片等
- 探测器
- 实现能量转换,测量和记录接收到的电磁辐射能量
- 举例:感光胶片(近紫外到近红外)、光电敏感元件(紫外到红外,电磁波信息转化为电信号)、热探测器(利用辐射的热效应工作,灵敏度和响应速度低,仅在热红外波段应用多)、波导(雷达探测器探测微波的元件)
- 处理器(输出电信号)
- 处理器的转化系统一般都是电光转化器
- 输出器
- 直接
- 摄影分幅胶片、扫描航带胶片、合成孔径雷达的波带片
- 间接
- 模拟磁带:回放出来的电信号可通过电光转化显示图像
- 数字磁带:带记录时要经过模数转换,回放时要经过数模转换,最后仍通过光电转化才能显示图像
- 直接
传感器的性能
- 获取信息:目标地物的大小、形状及空间分布特点;目标地物的属性特点和变化特点
- 即为:目标地物的几何特征、物理特征和时间特征
- 空间分辨率
- 遥感影像上能够详细区分的最小单元的尺寸或大小
- 直接表述方式
- 地面分辨率、像素分辨率、地面采样间隔
- 间接表述方式
- 瞬时视场角(IFOV)、影像分辨率 - 注意:其他表述方式都可以归化为地面分辨率
- 波谱分辨率
- 传感器探测器件接收电磁波辐射所能区分的最小波长范围,或接收目标辐射时能分辨的最小波长间隔
- 对扫描型传感器来说,波谱分辨率的提高不仅取决于探测器性能的改善,还受空间分辨率的制约
- 辐射分辨率(radiometric resolution)
- 表征传感器所能探测到的最小辐射功率的指标或指遥感影像记录灰度值的最小差值
- 表现:每一像元的辐射量化级
- 也称灰度分辨率
- 热红外传感器:也成为温度分辨率
- 时间分辨率
- 对同一目标进行遥感采样的时间间隔
- 也成为重访周期;对轨道卫星成为覆盖周期
- 取决于卫星轨道的类型和传感器的视场角范围与床干起的侧视能力
- 视场角(FOV)
- 传感器对地扫描或成像的总角度
- 决定了一幅图像对地面的覆盖范围
- 还决定了某些传感器的基高比,基高比越大,高程测量精度就越高
对于特定的地物,并不是波段越多、分辨率越高就越好;在某些情况下,波段太多、分辨率太高,接收到的信息量太大,形成海量数据,反而会“掩盖”地物电磁辐射特性,不利于快速探测和识别地物。因此,选择最佳工作波段与波段数,并具有最适当的分辨率的传感器是非常重要的,如感测人体选择8一12um,探测森林火灾等应选择3一5um,才能取得好的效果。
摄影型传感器
用光学系统成像并用胶片记录影像的传感器称为摄影型传感器,所得到的图像称为摄影图像。
- 分为框幅式摄影机、缝隙式摄影机、全景摄影机和多光谱摄影机
- 由摄影机、滤光片和感光材料组成
- 共同特点:由物镜收集电磁波,通过滤光片过滤,并聚焦到感光胶片,通过感光材料的探测与记录,在胶片上留下目标的潜像,经过摄影处理得到可见图像
- 工作在可见光波段,较多应用于航空遥感
- 单镜头框幅式摄影机:整幅图像同时曝光成像,获得一张完整且具有中心投影特征的分幅像片
- 缝隙式摄影机(航带式或推扫式摄影机):安装在飞机或卫星上,摄影瞬间所获取的影像是与航线垂直,且与缝隙等宽的一条地面影像带

- 全景摄影机(全景扫描相机、扫描摄像机、摇头摄像机):利用焦平面上一条平行飞行方向的狭缝来限制瞬时视场,在摄影瞬间获得地面上平行于航迹线的一条很窄的影像,当物镜沿垂直航线方向摆动时,就得到一幅全景像片,其特点是焦距长【但由于全景相机在成像过程中焦距保持不变,而物距随扫描角的增大而增大,因此在影像上会出现两边比例尺逐渐缩小的现象,称为“全景畸变” 】
- 多光谱摄影机:对同一地区、同一瞬间摄取多个波段影像的摄影机,获取的图像为多光谱图像,这增加了目标地物的信息量,提高影响的判读和识别能力
- 单镜头:利用分光装置滤光片,将收集的光束分离成不同的光谱部分,并使它们分别在不同的胶片上曝光,形成同一地物不同波段的影响【注意光束分离过程中能量的损失】
- 多镜头:利用多个物镜获取地面在不同波段的反射信息(采用在不同镜头前加装不同滤光片的形式),并同时在不同胶片上曝光而得到地物的多光谱像片
- 滤光片:摄取全色像片和彩色像片时,为了减少大气散射光的影响,增加影像反差和防止偏色,在摄影机的镜头前加浅黄色滤光片来限制蓝光的通过
- 具有很高的灵敏度和分辨率,但是响应波段短(0.4~1.1um),不便于信息的实时传输和数字处理,很难较长时间的连续工作
扫描型传感器(光机扫描仪、推帚式扫描仪、成像光谱仪)
探测范围从可见光到整个红外区,并采用专门的光敏或热敏探测器把收集到的地物电磁波能量变成电信号记录下来,然后通过无线电频道向地面发送
- 光机扫描仪
- 借助传感器本身沿着垂直于遥感平台飞行方向的横向光学机械 扫描,获取覆盖地面条带图像的成像装置
- 分为红外扫描仪和多光谱扫描仪
- 推帚式扫描仪(线性阵列传感器,linear array sensor,CCD固体扫描仪)
- 将固体光电转换元件排成一排作为探测器的扫描仪
- 成像光谱仪
- 使扫描仪在获取地物影像的同时也获取该地物的光谱组成。这种既能成像又能获取目标光谱曲线的“谱像合一”技术,称为成像光谱技术
微波成像类传感器
- 特点
- 全天候、全天时工作
- 瑞利散射衰减少
- 可见光遥感只能在白天工作,红外遥感不能穿透云雾
- 对地物有一定的穿透能力
- 波长越长,地表湿度越低,穿透深度越深
- 微波对地物具有特殊的波谱特征
- 微波辐射特征差异变大
- 例如,在微波波段中,水的比辐射率为0.4,而冰的比辐射率为0.99,其亮度温差相差100K,容易进行区分;而在红外波段,水的比辐射率为0.96,冰的比辐射率为0.92
- 雷达遥感图像包含相位信息和极化信息
- 不仅可以记录电磁波振幅信号,而且可以记录电磁波相位信息和极化信息
- 干涉测量:由数次观测得到的数据可以计算出针对地面上每一点的相位差,进而计算该点的高程
- 极化测量可以大大提高成像雷达对目标各种信息的获取能力
- 提供不同于可见光和红外遥感的信息
- 微波高度计具有测量距离的能力,可用于测定大地水准面
-由于海洋表面对微波的散射作用,可利用微波探测海面风力场,有利于提取海面的动态信息
- 微波高度计具有测量距离的能力,可用于测定大地水准面
- 全天候、全天时工作
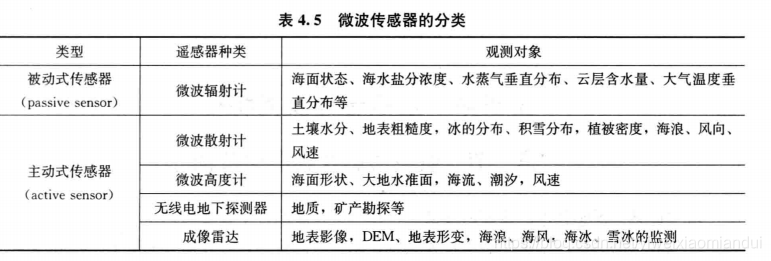
注意:以上5种微波传感器中,只有微波辐射计和成像雷达可用于成像
- 微波温度计:记录目标的亮度温度
- 雷达(RADAR, radio detection and ranging)无线电探测与测距:由发射极天线在很短时间内,向目标地物发射一束很窄的大功率电磁波脉冲,然后再由天线接收目标地物的回波信号而进行显示的传感器

















 7569
7569

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









