







Ubuntu 18.04 引导策略搜索 Guided policy search 环境安装,复现
根据官网教程步骤往下走,在安装过程中,遇到的坑点会提出来
step1 安装依赖:
python 2.7 依赖包:numpy1.16.4;matplotlib1.5.3;科学计算函数库scipy0.11.0;boost0.1;protobuf3.9.1;tensorflow0.12.1
step 2 setup :
1: 安装 protobuf
sudo apt-get install libprotobuf-dev protobuf-compiler libboost-all-dev
sudo pip install protobuf==3.9.1 #注意版本,高版本的 protobuf 不支持 2.7了
2: 下载源码:
git clone https://github.com/cbfinn/gps.git
3: 编译 proto文件:
cd gps
./compile_proto.sh
Box2D Setup:
- 安装 Wig 和 Pygame:
sudo apt-get install build-essential python-dev swig python-pygame git
-
下载 Pybox2d 源码:
git clone https://github.com/pybox2d/pybox2d #将版本切回到 2.3.2, 现在的 master是较高版本, 需要 python3支持 git checkout 2.3.2
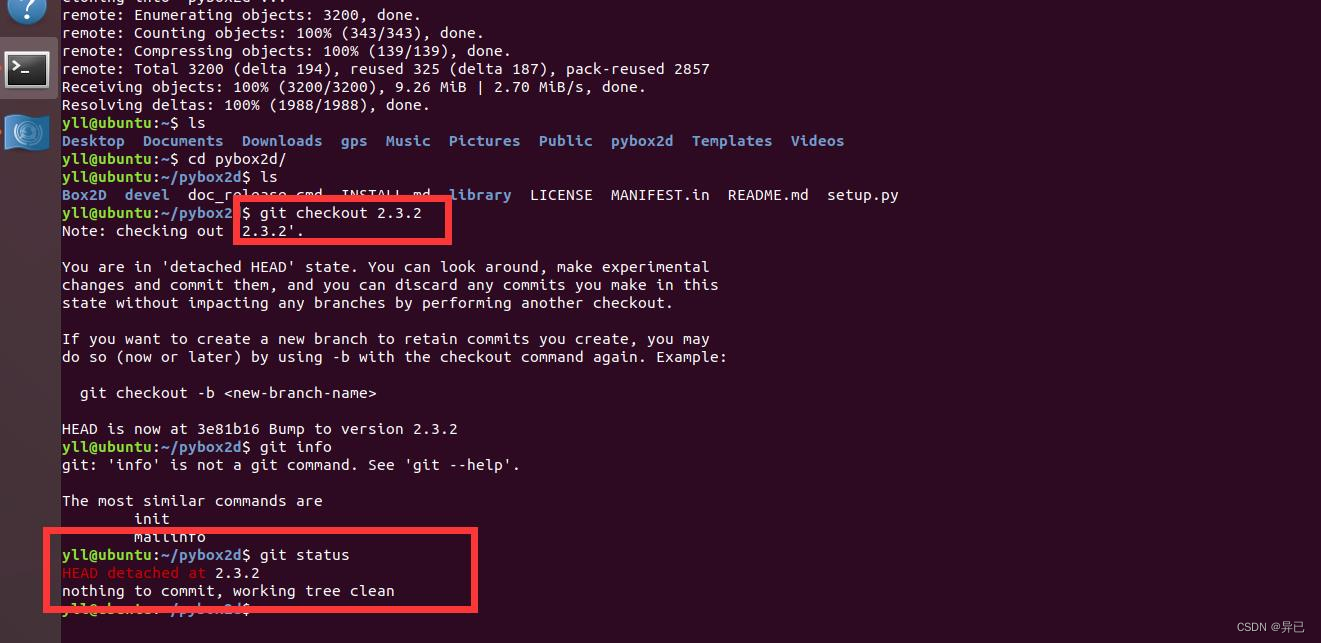
-
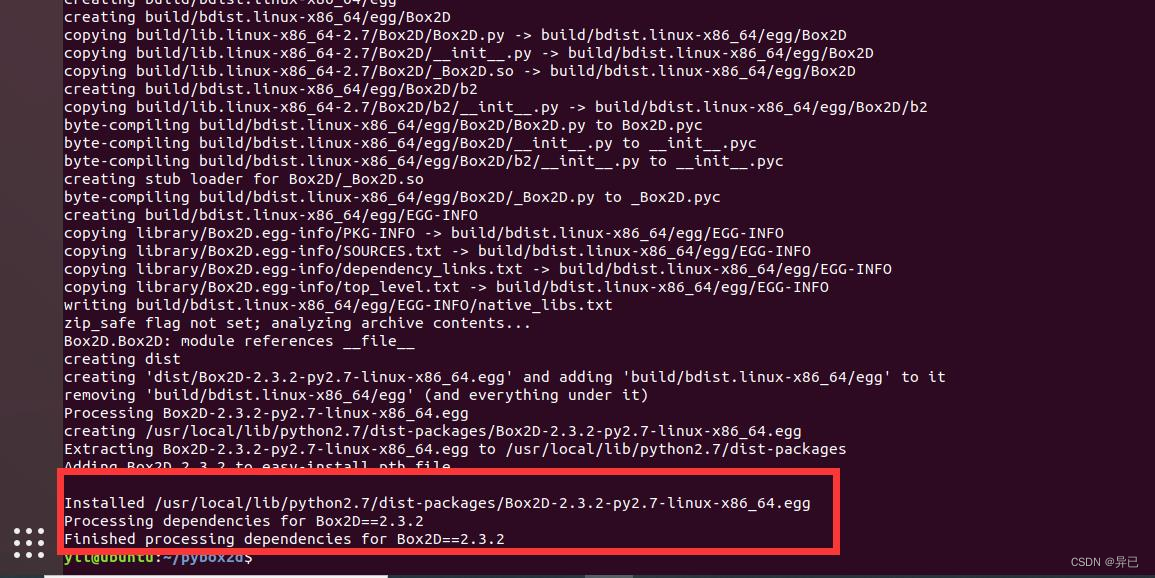
安装:
python setup.py build sudo python setup.py install出现下面框框文字就可以了。
如果出现了 qt4 的报错, 执行一下命令:
cd ~
wget http://archive.ubuntu.com/ubuntu/pool/universe/q/qt-assistant-compat/libqtassistantclient4_4.6.3-7build1_amd64.deb
sudo apt-get install ./libqtassistantclient4_4.6.3-7build1_amd64.deb
wget http://archive.ubuntu.com/ubuntu/pool/universe/p/python-qt4/python-qt4_4.12.1+dfsg-2_amd64.deb
sudo apt-get install ./python-qt4_4.12.1+dfsg-2_amd64.deb
wget http://archive.ubuntu.com/ubuntu/pool/universe/p/python-pyaudio/python-pyaudio_0.2.11-1build2_amd64.deb
sudo apt-get install ./python-pyaudio_0.2.11-1build2_amd64.deb
-
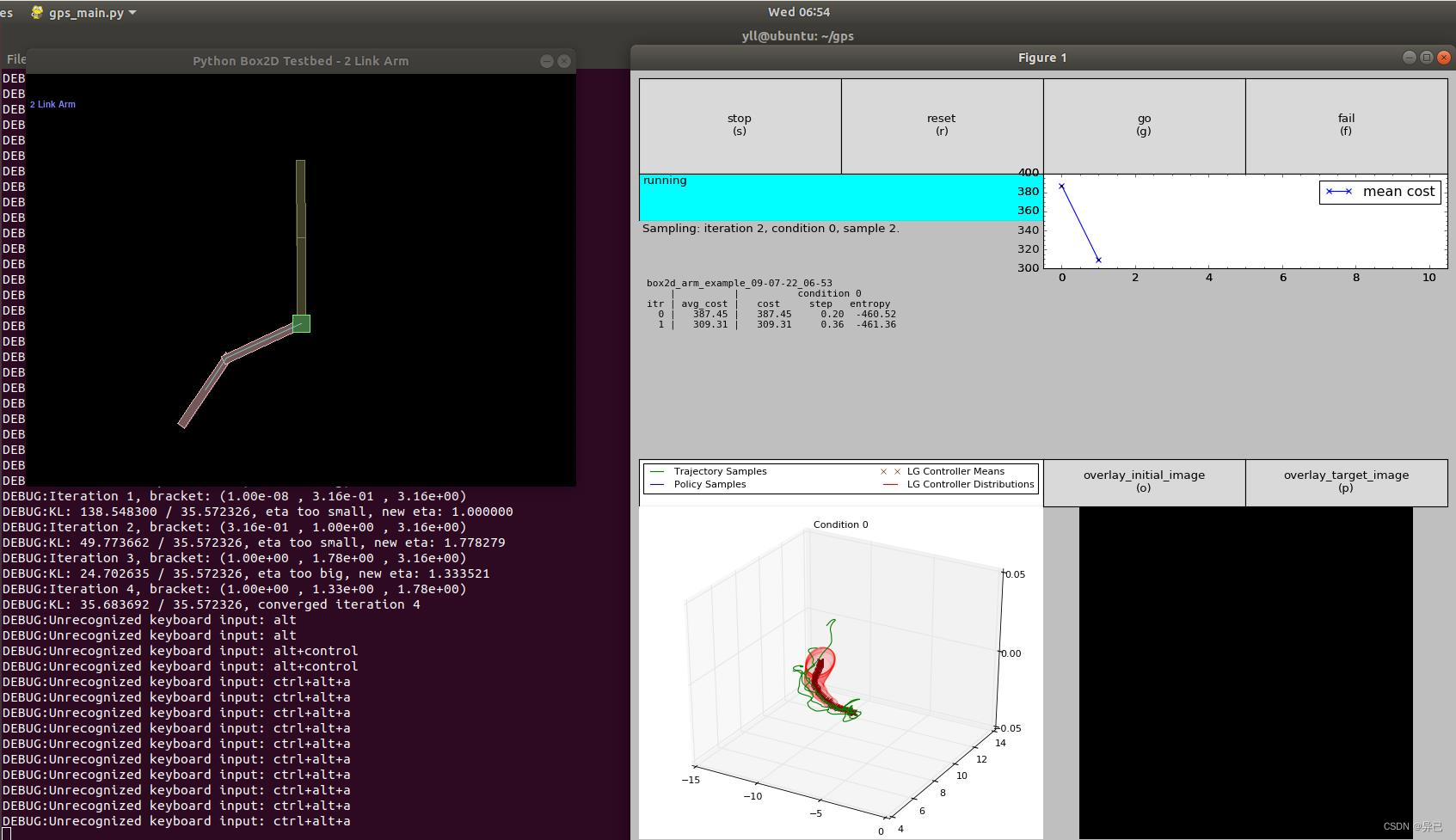
运行测试:
python python/gps/gps_main.py box2d_arm_example出现一下界面即可。
ROS Setup:
-
安装 ROS 以及 pr2 , ubuntu 18.04 版本选择 melodic 版本 ros, 参照官网教程安装即可:
pr2:
sudo apt-get install ros-melodic-pr2-* -
添加 gps_agent_pkg 路径到 ROS_PACKAGE_PATH:
echo "export ROS_PACKAGE_PATH=$ROS_PACKAGE_PATH:/path/to/gps:/path/to/gps/src/gps_agent_pkg" >> ~/.bashrc source ~/.bashrc -
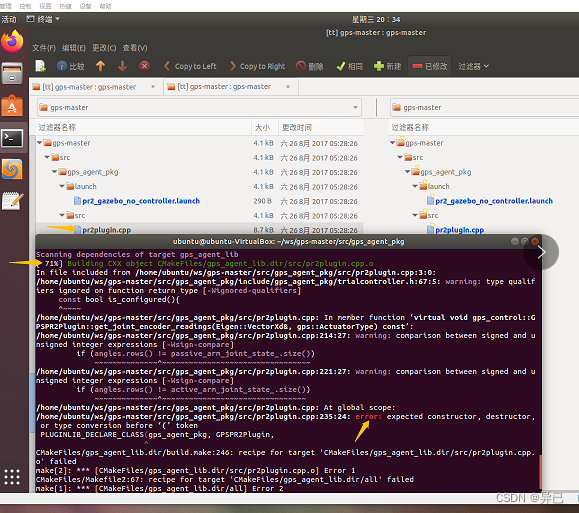
编译:
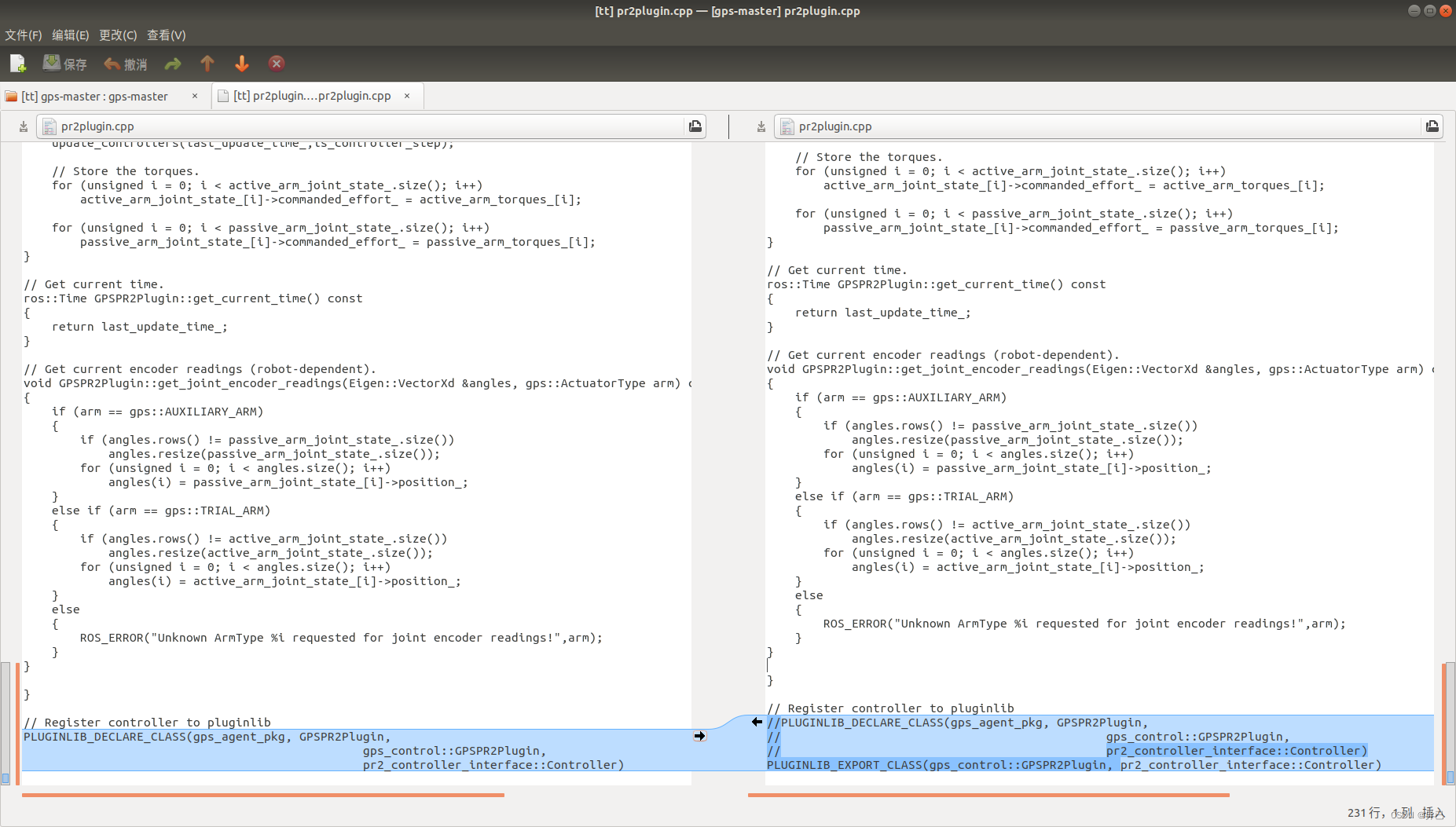
sudo apt-get install ros-melodic-convex-decomposition sudo apt-get install ros-melodic-ivcon cd src/gps_agent_pkg/ cmake . make -j如果编译出现如下报错, 修改 pr2plugin.cpp文件:
-
测试:
终端 1:
roscore终端 2:
roslaunch gps_agent_pkg pr2_gazebo.launch //运行 gazebo终端 3:
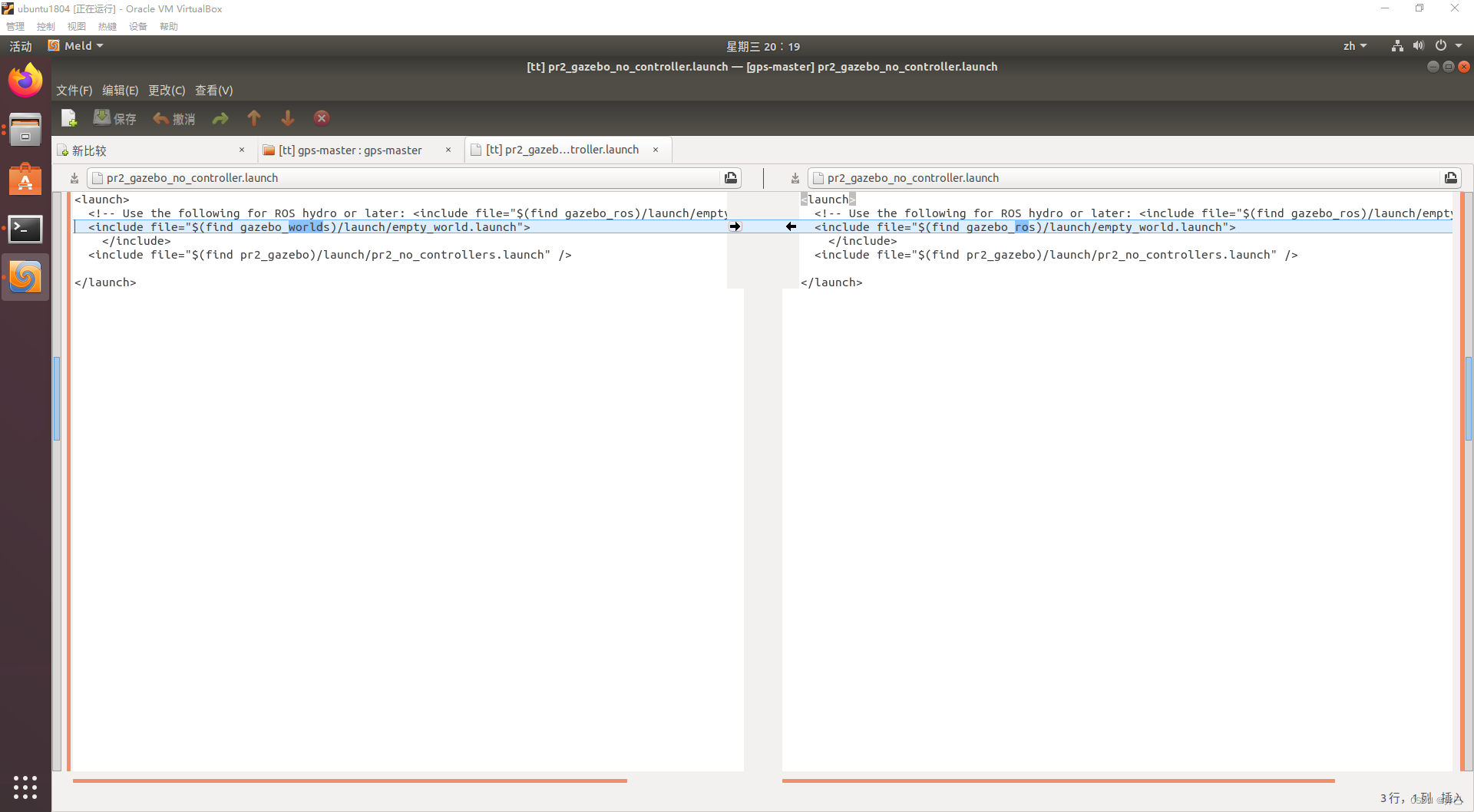
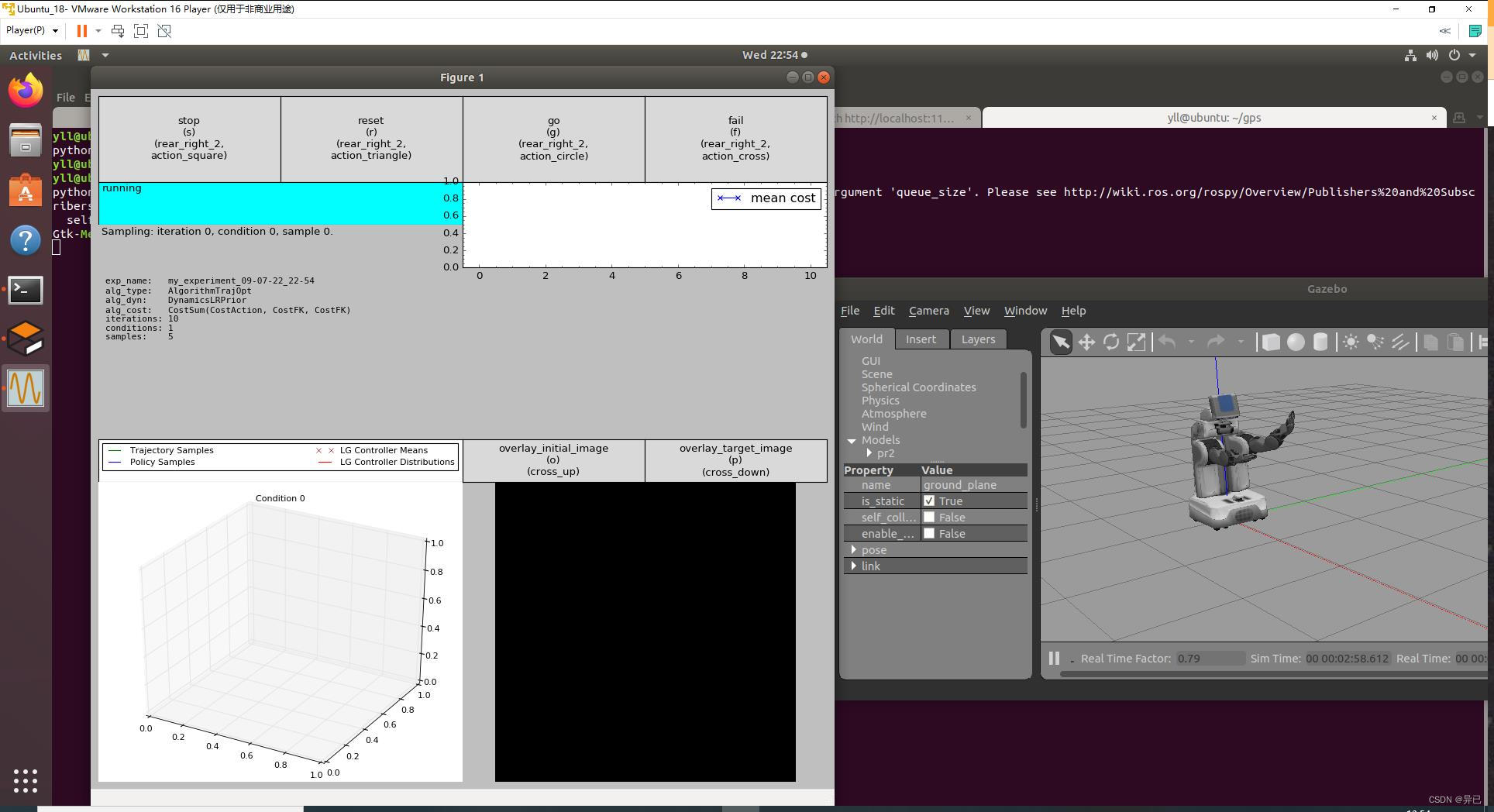
python python/gps/gps_main.py pr2_example如果出现报错, 修改 launch 文件:
成功:















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









