







3DSSD
- voxel-based methods:straightforward and efficient but loss information and encounter performance bottleneck
- Point-based methods:achieve better performance but have two stage and inference time is usually intolerable
- 首个不用FP layers 和 the refinement module的point-based方法,并且针对耗时问题提出新的框架将旧方法的固有模块删除,权衡effective and efficient。
Key Knowledgeable:
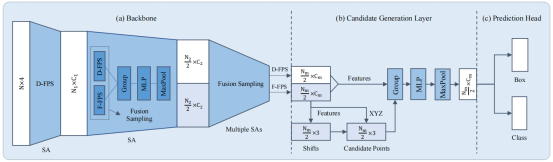
- Fusion Sampling
the cost of time in FP layers and the refinement module
Point-based methods有着更高的precision,但是FP layers and the refinement module的时间消耗过大,尝试去除这两个模块:
Feature-FPS
区别于常规的FPS(Distance-FPS),Feature-FPS以各个点的语义特征做FPS采样,使得采样的点尽可能多地覆盖到所有类别。可以显著提高去除FP layer情况下使用D-FPS的召回率。
Fusion Sampling

Ld:距离差距大,尽可能覆盖全部区域(防止背景点过少样本不平衡,不利于分类任务)
Lf:语义特征差距大,尽可能采样多的种类点 - Candidate Generation Layer

backbone提取的Nm/2个点的特征用于候选中心点的选取(D-FPS的点大多是背景点只用于聚合特征,而不会成为候选框的中心点)。
将每个候选中心点有监督着朝着中心做偏移,成为真正的候选点。
- Anchor-free Regression Head
通过CG获得的候选点特征进行偏移量(dx、dy、dz)与框大小(dl、dw、dh)的预测用于回归出box:
- 3D Center-ness Assignment Strategy
为每个一个候选点分配标签,参考FCOS在2D图像上通过掩码标签(表示是否在框中)与计算中心度标签:
计算哪个点尽可能靠近3Dbox的中心点(靠近中心点的f≈b,l≈r,t≈d)















 6345
6345











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









