






恶劣天候鲁棒三维目标检测论文整理
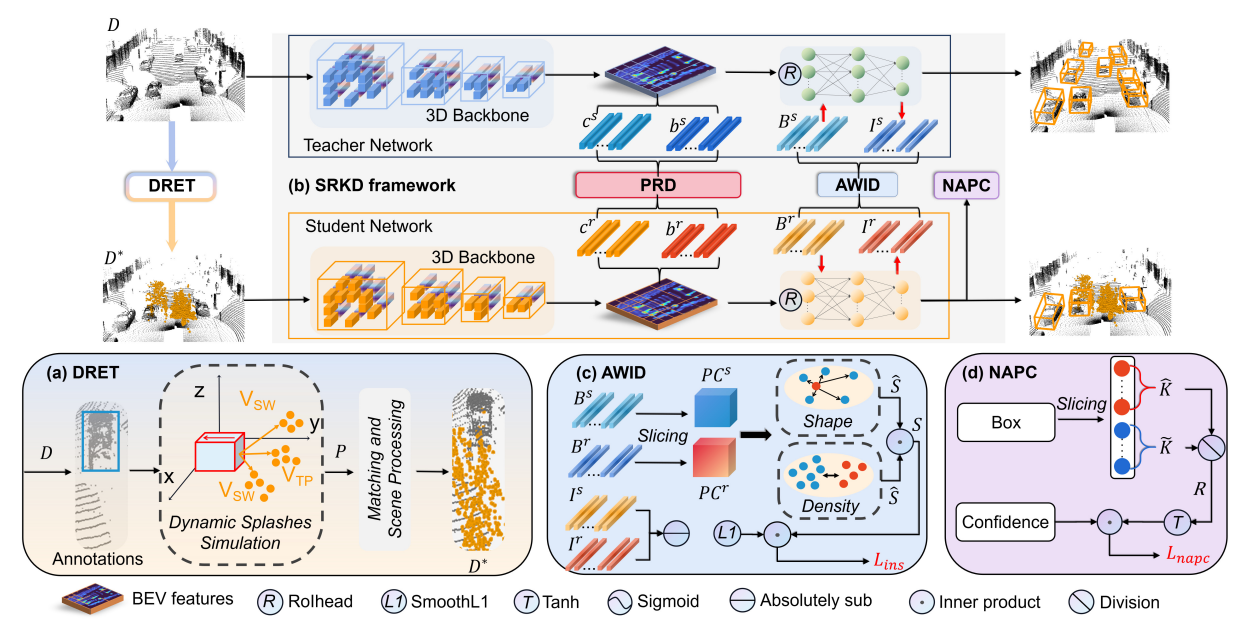
- Sunshine to Rainstorm: Cross-Weather Knowledge Distillation for Robust 3D Object Detection
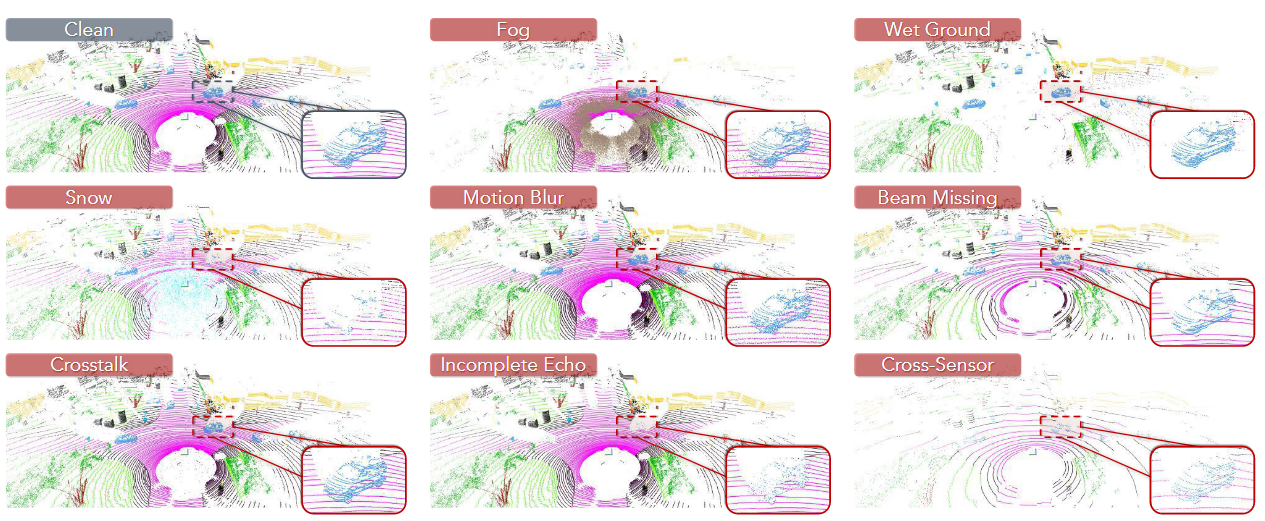
- Robo3D: Towards Robust and Reliable 3D Perception against Corruptions
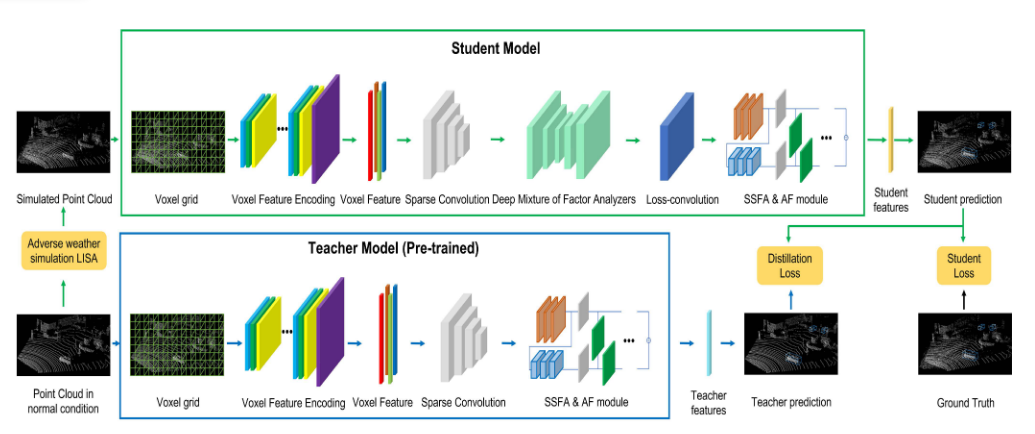
- LossDistillNet: 3D Object Detection in Point Cloud Under Harsh Weather Conditions
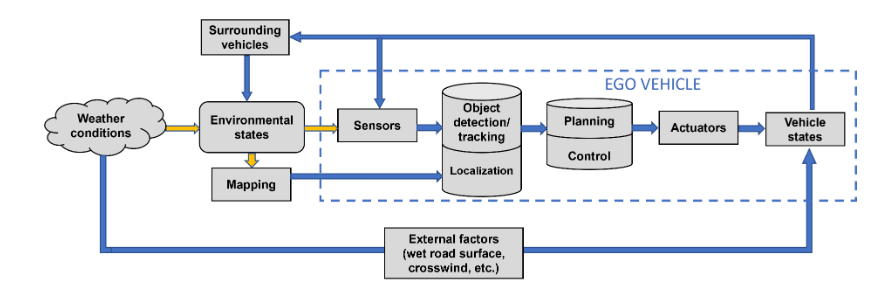
- Autonomous Driving in Adverse Weather Conditions: A Survey
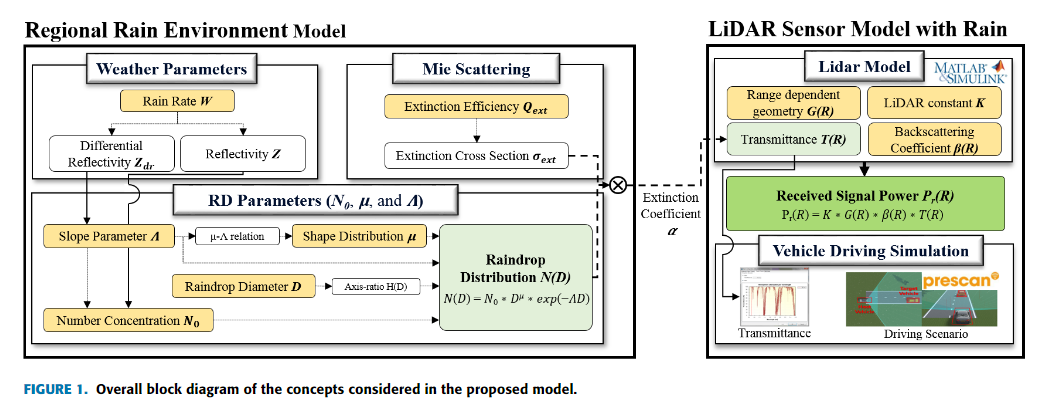
- Analysis of Automotive Lidar Sensor Model Considering Scattering Effects in Regional Rain Environments
- Robust 3D Object Detection in Cold Weather Conditions
- Pay "Attention" to Adverse Weather: Weather-aware Attention-based Object Detection
- Bijelic_Seeing_Through_Fog_CVPR_2020_supplemental
- CNN-based Lidar Point Cloud De-Noising in Adverse Weather
- Fog Simulation on Real LiDAR Point Clouds for 3D Object Detection in Adverse Weather
- LiDAR Snowfall Simulation for Robust 3D Object Detection
- De-noising of Lidar Point Clouds Corrupted by Snowfall
- Robust Multimodal Vehicle Detection in Foggy Weather Using Complementary Lidar and Radar Signals
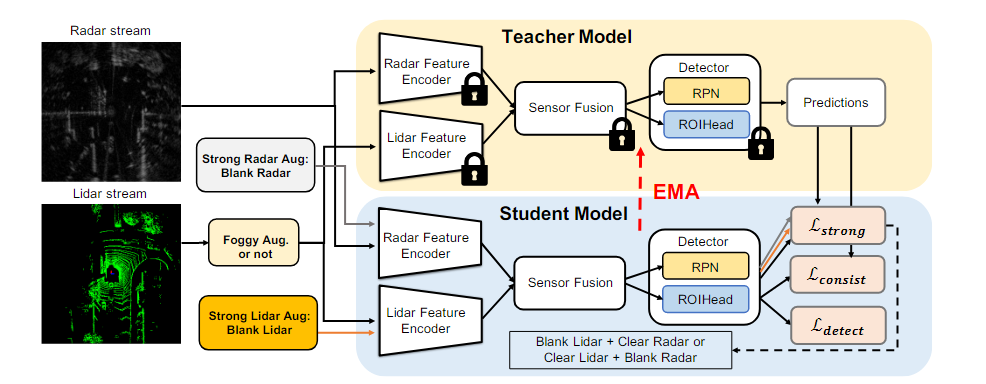
- Modality-Agnostic Learning for Radar-Lidar Fusion in Vehicle Detection
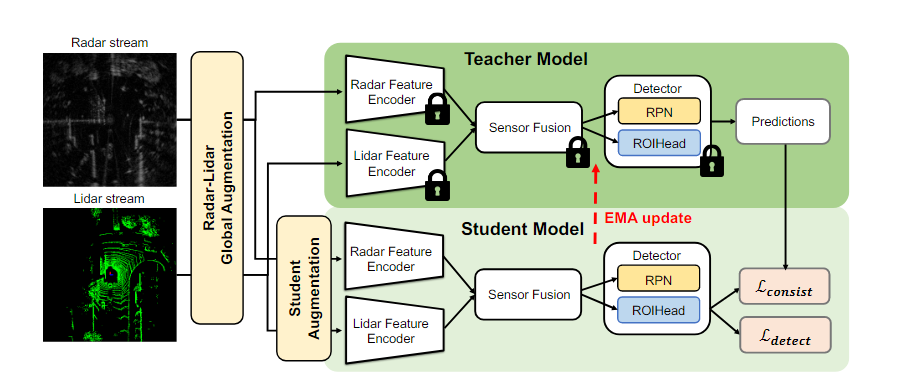
- ST-MVDNET++: IMPROVE VEHICLE DETECTION WITH LIDAR-RADAR GEOMETRICAL AUGMENTATION VIA SELF-TRAINING
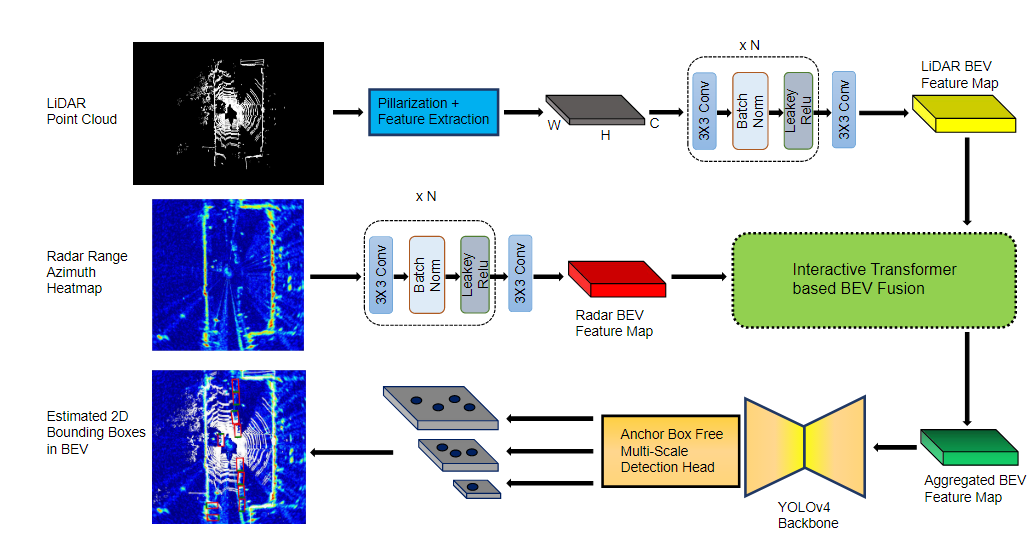
- RaLiBEV: Radar and LiDAR BEV Fusion Learning for Anchor Box Free Object Detection Systems
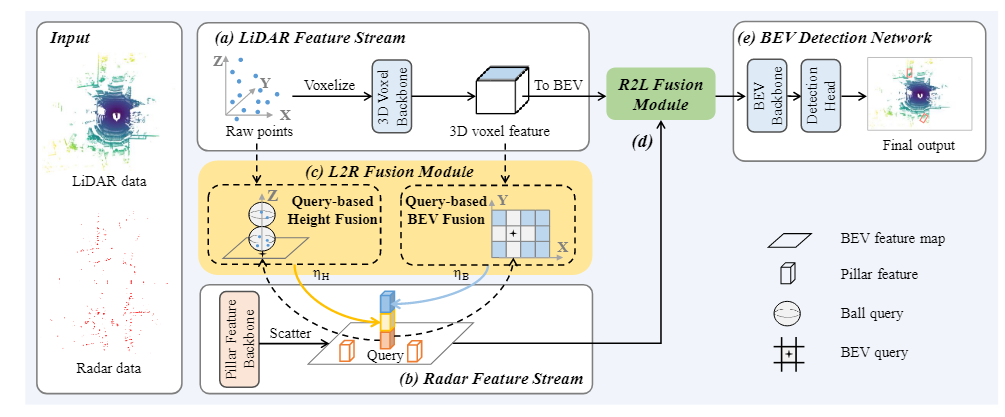
- Bi-LRFusion: Bi-Directional LiDAR-Radar Fusion for 3D Dynamic Object Detection
Sunshine to Rainstorm: Cross-Weather Knowledge Distillation for Robust 3D Object Detection
Robo3D: Towards Robust and Reliable 3D Perception against Corruptions
LossDistillNet: 3D Object Detection in Point Cloud Under Harsh Weather Conditions
Autonomous Driving in Adverse Weather Conditions: A Survey
Analysis of Automotive Lidar Sensor Model Considering Scattering Effects in Regional Rain Environments
Robust 3D Object Detection in Cold Weather Conditions
Pay “Attention” to Adverse Weather: Weather-aware Attention-based Object Detection
Bijelic_Seeing_Through_Fog_CVPR_2020_supplemental
CNN-based Lidar Point Cloud De-Noising in Adverse Weather

Fog Simulation on Real LiDAR Point Clouds for 3D Object Detection in Adverse Weather
LiDAR Snowfall Simulation for Robust 3D Object Detection
De-noising of Lidar Point Clouds Corrupted by Snowfall
Robust Multimodal Vehicle Detection in Foggy Weather Using Complementary Lidar and Radar Signals
Modality-Agnostic Learning for Radar-Lidar Fusion in Vehicle Detection
ST-MVDNET++: IMPROVE VEHICLE DETECTION WITH LIDAR-RADAR GEOMETRICAL AUGMENTATION VIA SELF-TRAINING
RaLiBEV: Radar and LiDAR BEV Fusion Learning for Anchor Box Free Object Detection Systems
Bi-LRFusion: Bi-Directional LiDAR-Radar Fusion for 3D Dynamic Object Detection
















 735
735

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









