







系列文章目录
前言
使用输入捕获测占空比
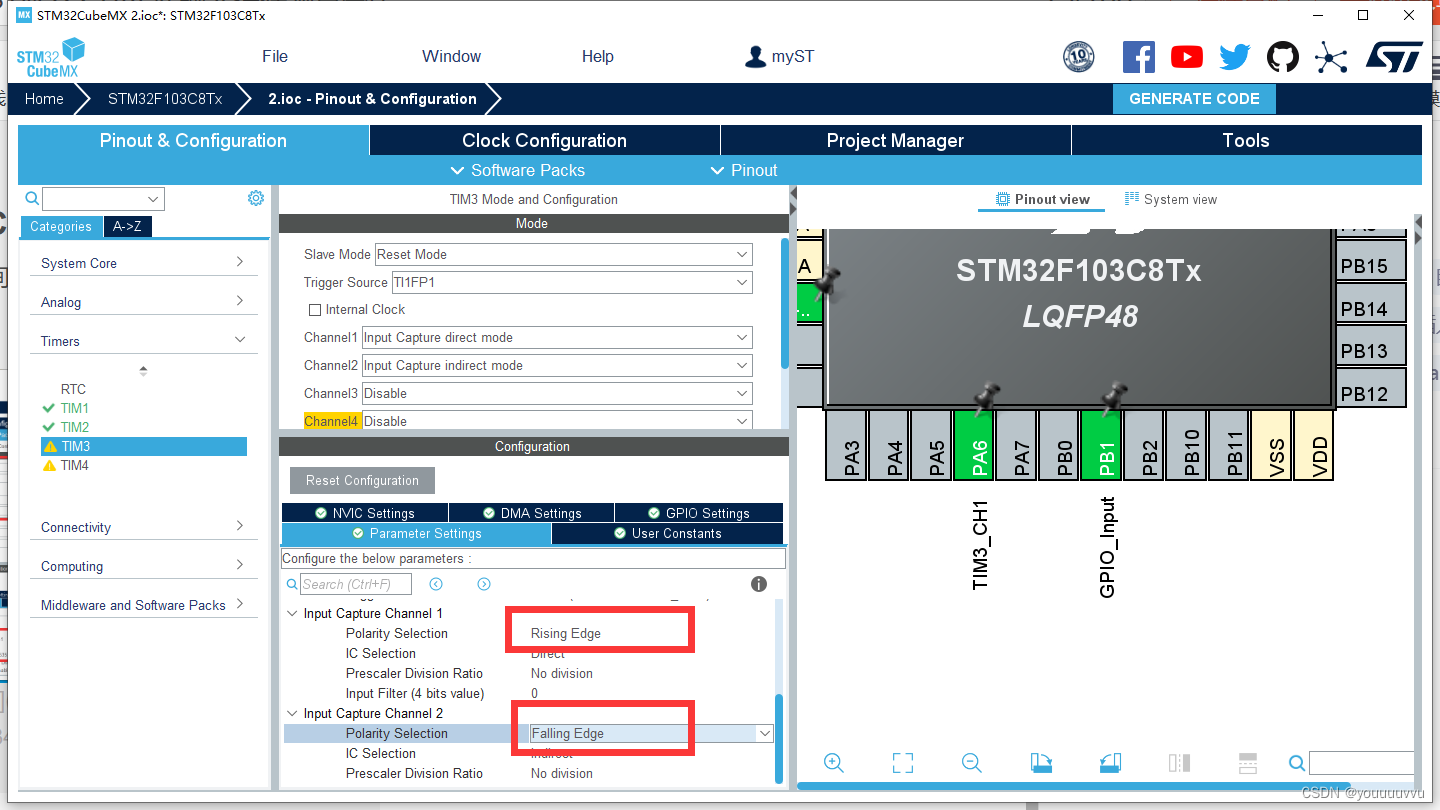
一、STM32CubeMX设置
一个直接模式,一个间接模式
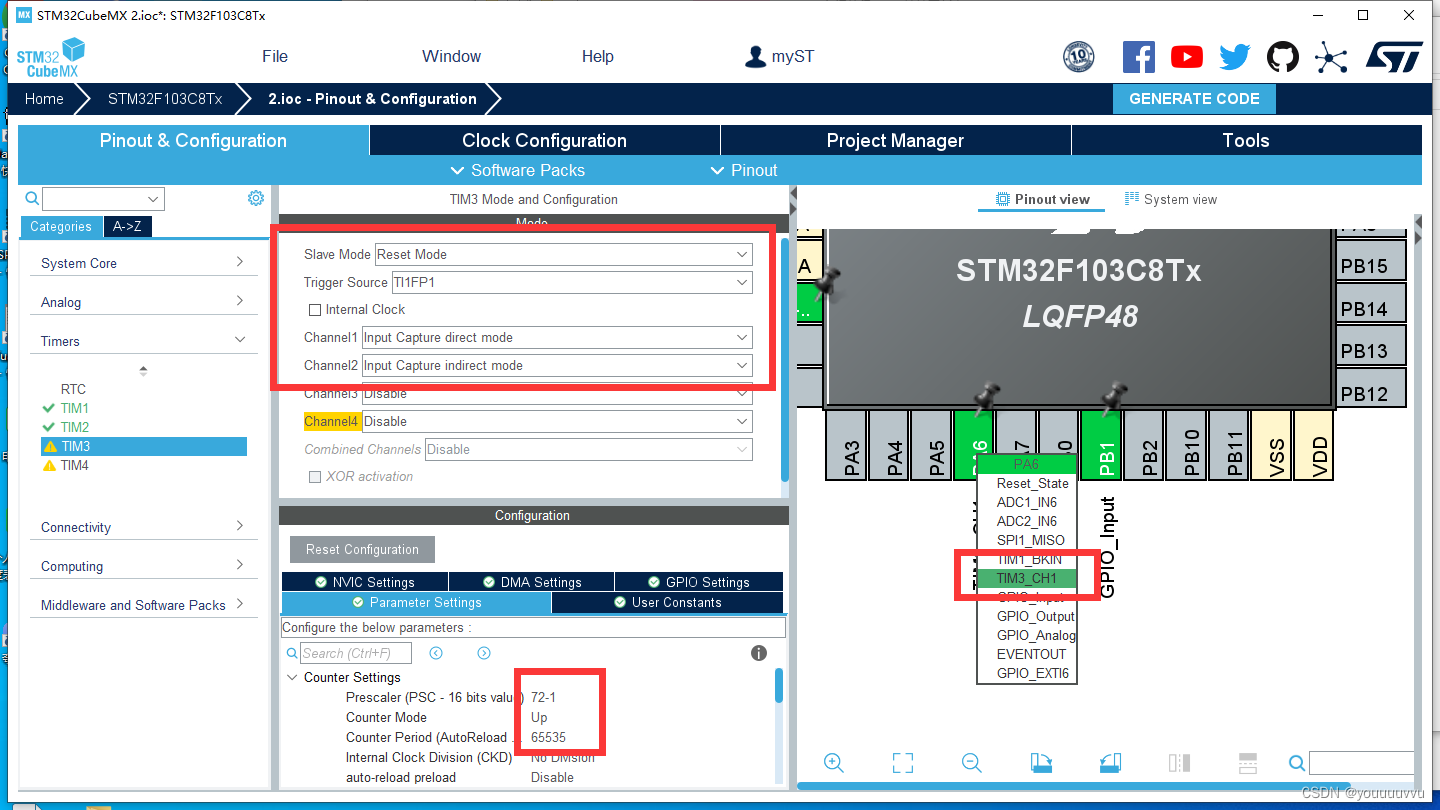
一个上升沿,一个下降沿
二、代码
HAL_TIM_PWM_Start(&htim2, TIM_CHANNEL_1);
HAL_TIM_IC_Start (&htim3, TIM_CHANNEL_1);
HAL_TIM_IC_Start (&htim3, TIM_CHANNEL_2);
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
printf("Freq:%dHz\r\n",1000000 / (HAL_TIM_ReadCapturedValue(&htim3,TIM_CHANNEL_1) + 1));
printf("Duty:%d\%%",(HAL_TIM_ReadCapturedValue(&htim3,TIM_CHANNEL_2) + 1) * 100 / (HAL_TIM_ReadCapturedValue(&htim3,TIM_CHANNEL_1) + 1));
HAL_Delay(500);
}
/* USER CODE END 3 */















 1075
1075











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









