







一、实验内容和要求
车道偏离预警系统,其英文全称为Lane Departure Warning System,因此很多车型上都将车道偏离预警系统简称为LDW系统。其主要功能是通过车辆上的传感器、控制器等部件,在车辆发生无意识偏离车道时通过声音、闪光和振动等方式提醒驾驶员。在本项目中,设计车道行驶偏离车道线预警系统的内容和要求如下:
1.通过高斯滤波过滤可能对后期处理影响的噪声点。
2.利用Canny算子分割获取二值化的路面信息。
3.基于霍夫变换的车道线直线识别(包括多条车道线)。
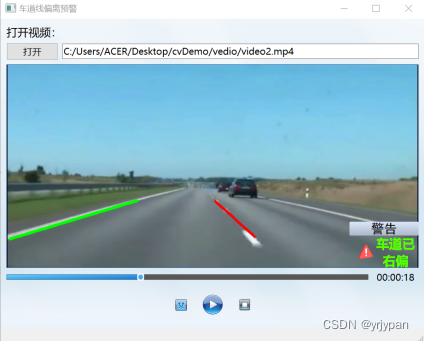
4.车道是否将行驶出车道线预警,交互式方式提示用户。
该项目能够对于非拥堵状态下的行车环境实现车辆行驶偏离车道线预警功能。
二、实验主要步骤
(一)整体项目步骤
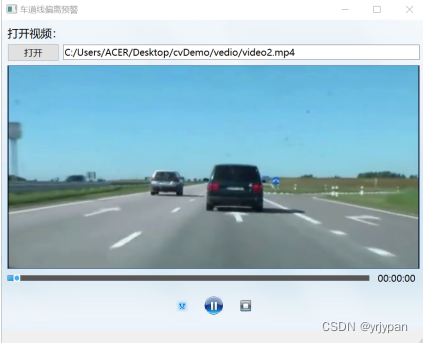
1.交互界面
交互界面基于Qt、Opencv与Visual studio完成,主要实现了打开文件目录下的视频文件,使用videocapture处理车道检测视频逐帧获取mat对象,对mat对象进行处理后将其转换为qimage对象,从而在交互界面的qlabel上播放。根据处理结果判断车道是否发生偏移,并且在视频中以交互式方式提示用户。除此之外,我们还实现了视频的暂停与结束功能,并自制了视频进度条。
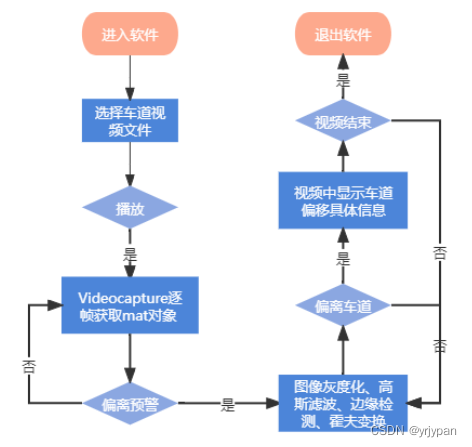
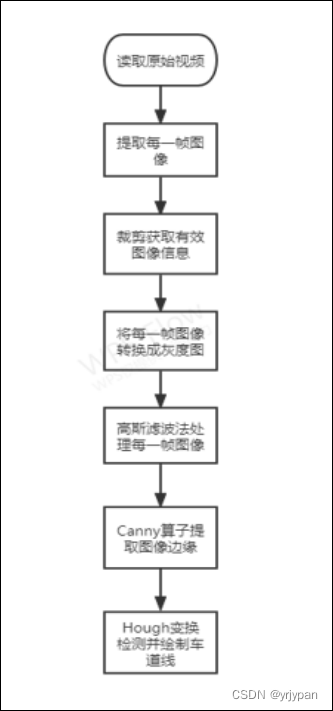
2.分割并绘制车道线
本部分主要包括对视频的预处理和车道线检测绘制。首先获取视频中的每一帧图像,将每一帧图像转换成灰度图;图像的上半部分为背景(天空),对检测车道线没有作用,为了减少数据的存储量,对每一帧图像的上半部分进行了裁剪,只保留图像下半部分来对车道线进行检测。完成上述工作后,将裁剪的每一帧图像转换成灰度图,并用高斯滤波法去除图像中可能存在的噪声,最后用Canny算子提取图像的边缘,用Hough变换检测并绘制出车道线。
......
......
......
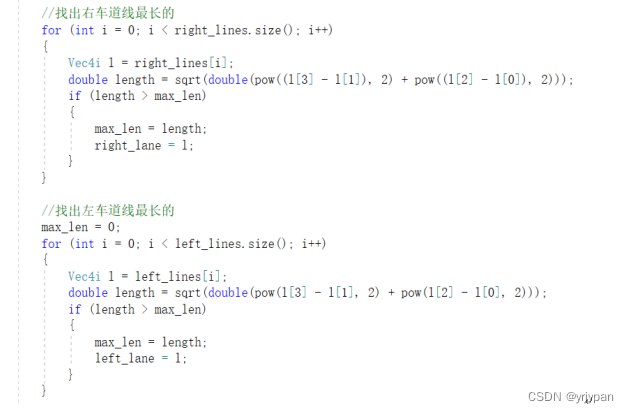
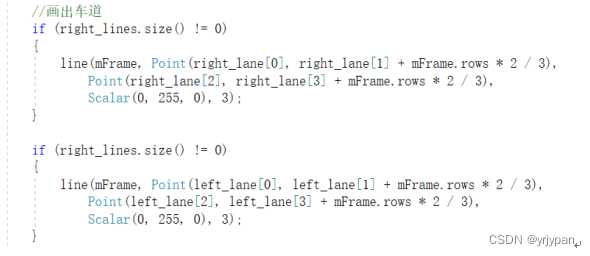
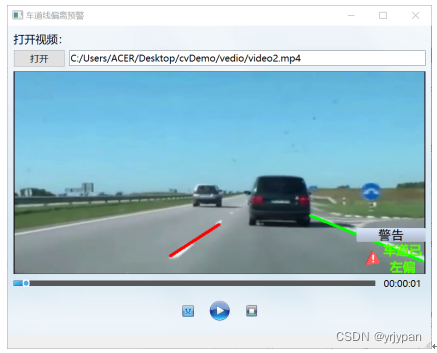
3.偏离预警
......
......
......
......
......
......


源码和报告问题交流:个人主页查看博客简介















 6888
6888











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









