









 本文介绍了一种使用Python和OpenCV进行文档扫描与矫正的方法。通过灰度处理、双边滤波降噪、边缘识别等预处理步骤,结合轮廓检测和多边形拟合,实现了文档的自动识别与矫正。此外,提供了旋转和保存功能,以增强用户体验。
本文介绍了一种使用Python和OpenCV进行文档扫描与矫正的方法。通过灰度处理、双边滤波降噪、边缘识别等预处理步骤,结合轮廓检测和多边形拟合,实现了文档的自动识别与矫正。此外,提供了旋转和保存功能,以增强用户体验。
目标:
1. 识别图片中的文档并矫正
2. 可以旋转结果来调整
3. 可以保存。
注意:文档与背景差别越大越好。
效果如下:
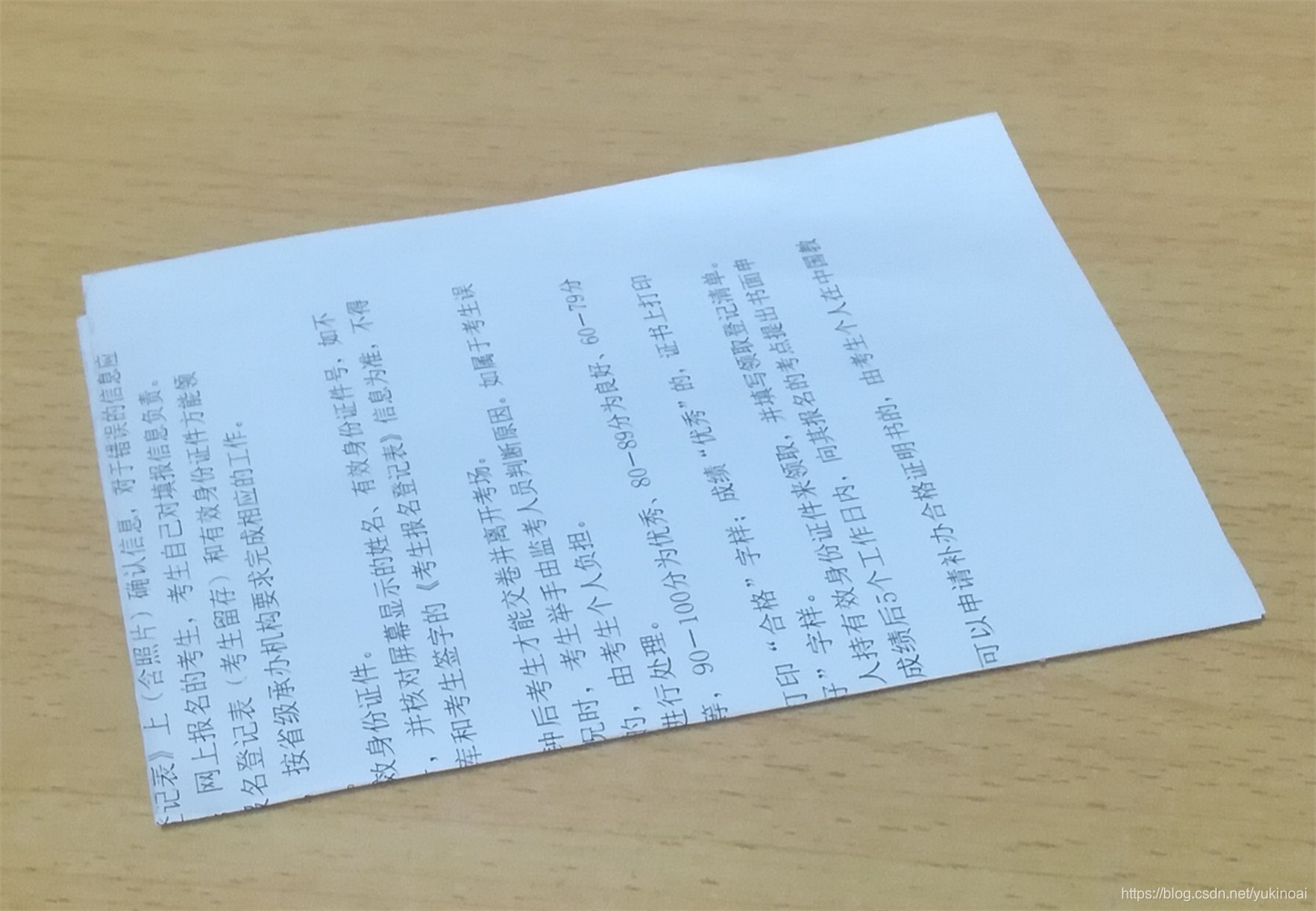
原图像:
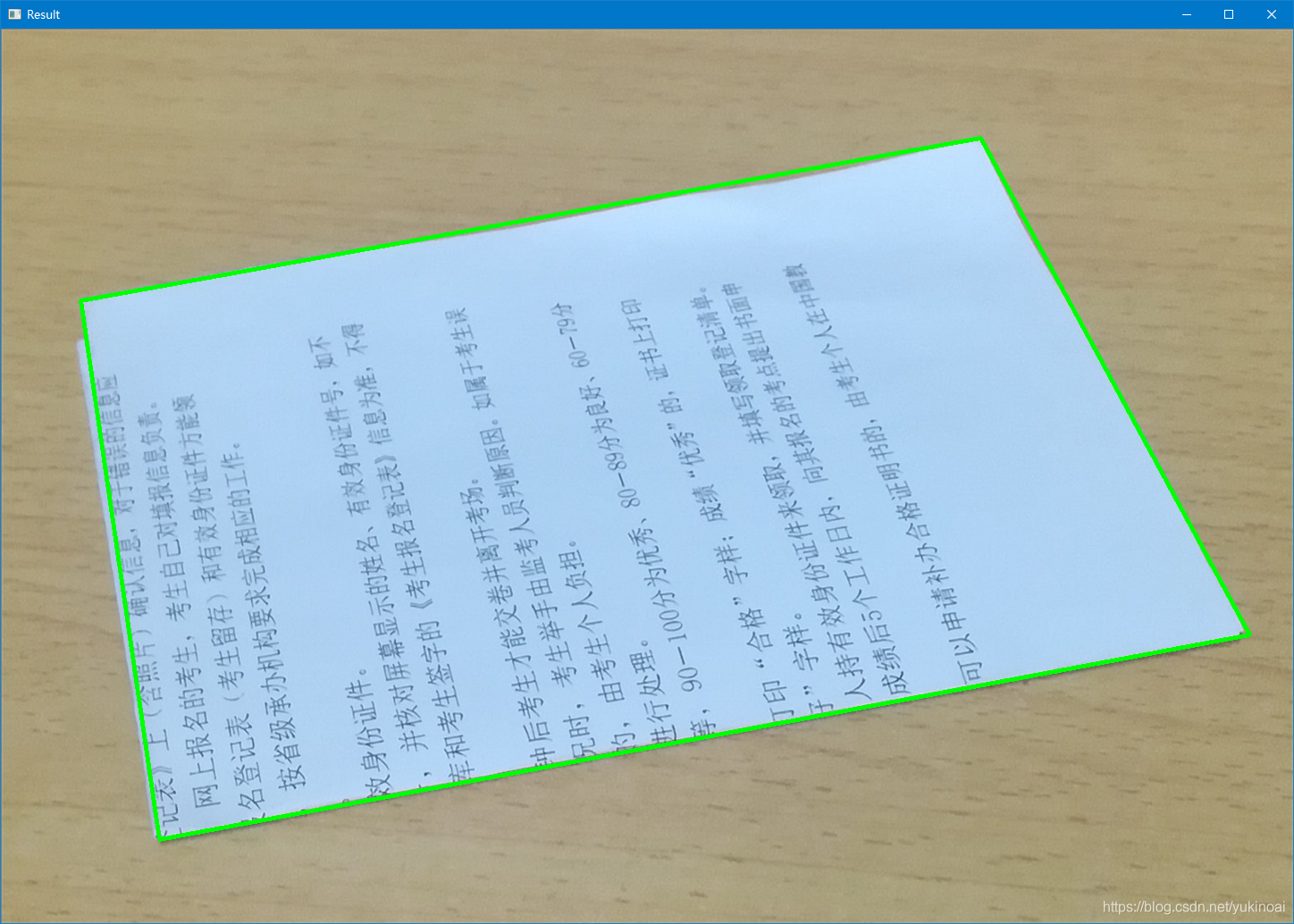
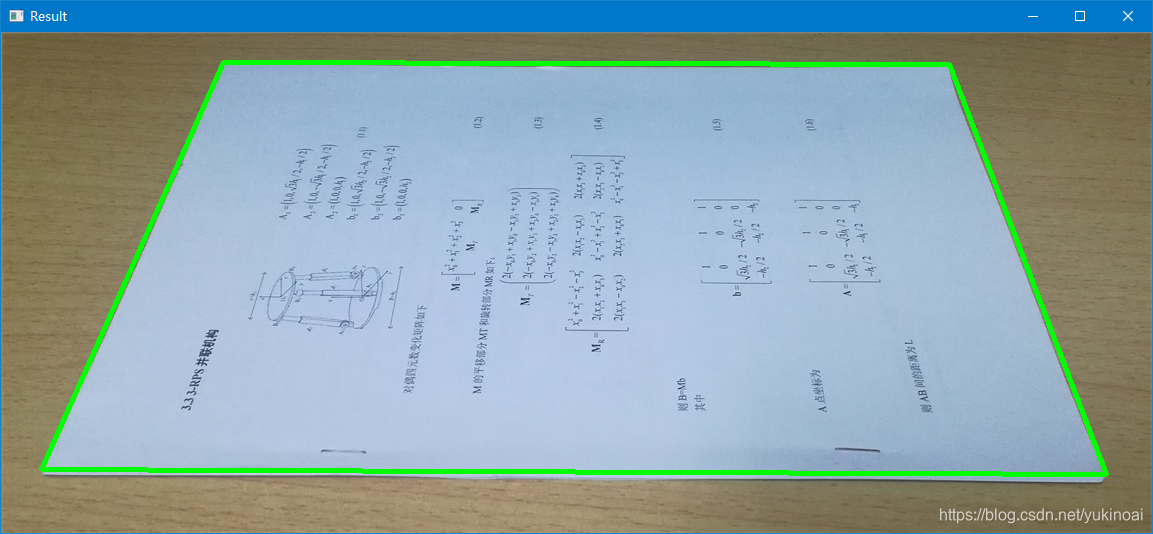
识别结果:
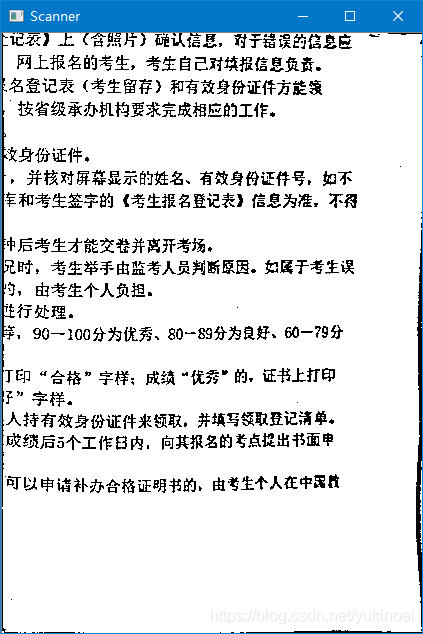
矫正结果:
程序如下:
import cv2
import numpy as np
# 文档长宽,下面是A4纸比例
x = 420 # 长
y = 600 # 宽
def preProcessor(img):
"""
图片预处理
"""
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY) # 灰度
blurred = cv2.bilateralFilter(gray, 2, 200, 200) # 双边滤波降噪
edged = cv2.Canny(blurred, 25, 200) # 边缘识别
edged = cv2.dilate(edged, cv2.getStructuringElement(cv2.MORPH_RECT, (3, 3))) # 膨胀连接边缘
cnts = cv2.findContours(edged.copy(), cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE) # 寻找轮廓
cnts = cnts[1] # 最外轮廓
docCnt = None # 文档轮廓
# 确保至少找到一个轮廓
if len(cnts) > 0:
# 按轮廓面积降序排列
cnts = sorted(cnts, key=cv2.contourArea, reverse=True)
for c in cnts:
# 近似轮廓
peri = cv2.arcLength(c, True) # 获取轮廓周长
approx = cv2.approxPolyDP(c, 0.02 * peri, True) # 多边形拟合,输出多边形顶点
# 如果我们的近似轮廓有四个顶点,则确定找到了文档
if len(approx) == 4:
docCnt = approx
break
cv2.polylines(img, [docCnt], True, (0, 255, 0), 3) # 画出轮廓
return [i[0] for i in docCnt]
def transform(img, mp, dp):
"""
透视变换,mp:原图像点, dp:目标图像点
"""
global x
global y
# 修改点的格式
pts1 = np.float32(mp)
pts2 = np.float32(dp)
# 生成透视矩阵
M = cv2.getPerspectiveTransform(pts1, pts2)
# 转换
dst = cv2.warpPerspective(img, M, (x, y))
return dst
def enhance(img):
"""
增强显示
"""
dst = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# 自适应阈值
th = cv2.adaptiveThreshold(dst, 255, cv2.ADAPTIVE_THRESH_MEAN_C, cv2.THRESH_BINARY, 11, 5)
return th
def show(img):
"""
绘图
"""
global x
global y
cv2.imshow('Scanner', img)
k = cv2.waitKey(0)
if k == 27: # 按ESC退出
cv2.destroyAllWindows()
elif k == ord('r'): # 按r旋转结果
init = [[0, 0], [x, 0], [x, y], [0, y]]
dstp = init[1:] + init[:1]
img = transform(img, init, dstp)
show(img)
elif k == ord('s'): # 按s保存图片
cv2.imwrite('Scanned5.png')
if __name__ == "__main__":
img = cv2.imread("doc2.jpg")
src = img.copy()
mp = preProcessor(img)
cv2.imshow('Result', img)
dp = [[0, y], [x, y], [x, 0], [0, 0]]
docimg = transform(src, mp, dp)
docimg = enhance(docimg)
cv2.namedWindow('Scanner', cv2.WINDOW_NORMAL)
show(docimg)
原图不清楚的话,扫描后也看不清:
扫描结果,刚识别完方向不对,可以按r调整:

















 1973
1973

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









