






永磁同步电机,基于扩展卡尔曼滤波算法无传感器仿真模型,s函数编写算法,基于matlab/simulink搭建。
ID:87304755459494308
又见江南雨
永磁同步电机是一种高效、高性能的电机,广泛应用于工业领域。然而,传统的永磁同步电机需要使用传感器来获取转速和位置信息,增加了系统的复杂性和成本。为了解决这一问题,近年来,基于扩展卡尔曼滤波算法的无传感器控制方法逐渐受到了研究者的关注。
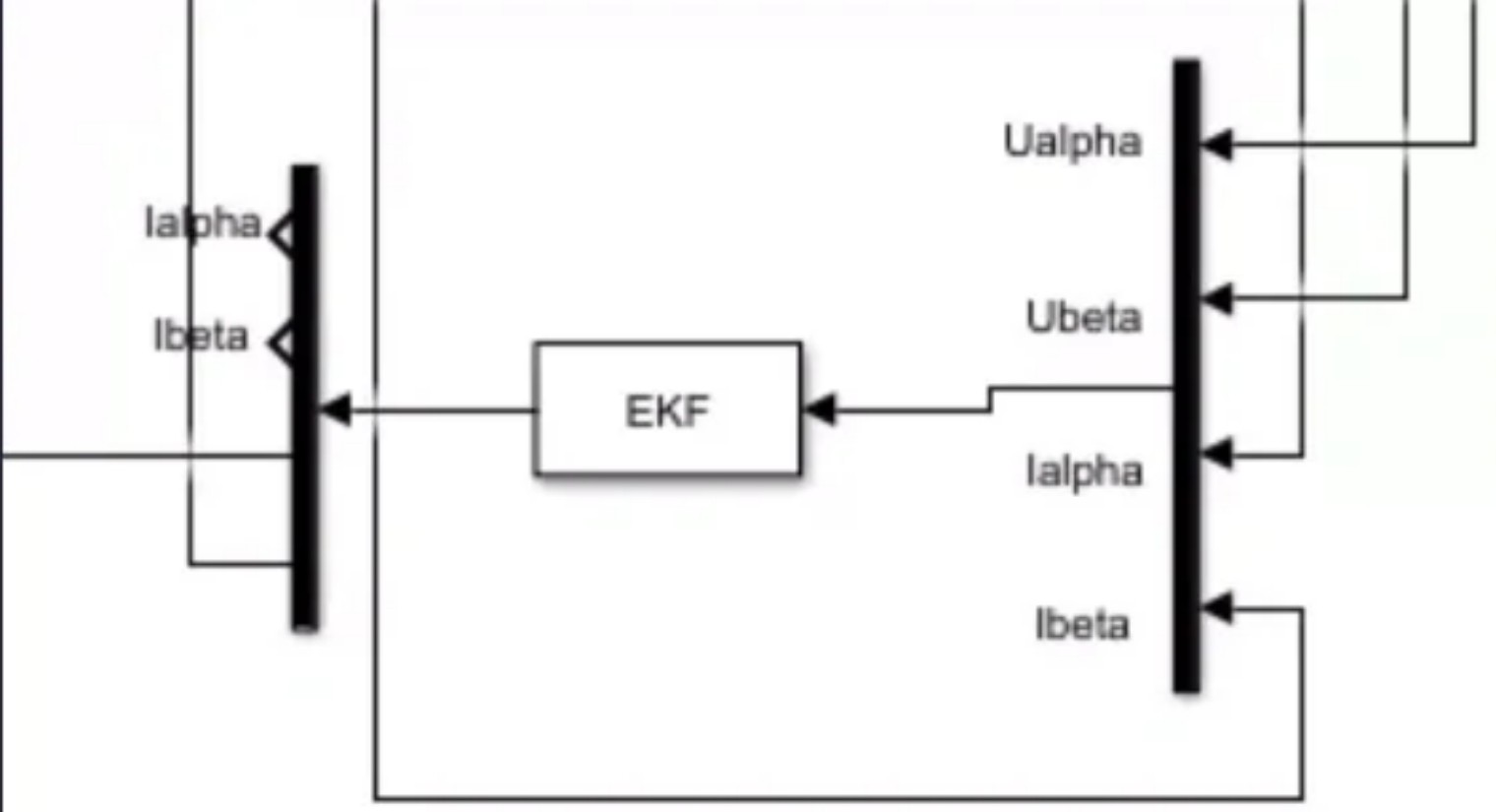
扩展卡尔曼滤波算法(Extended Kalman Filter, EKF)是卡尔曼滤波算法的一种推广形式,广泛应用于非线性系统的状态估计问题。在永磁同步电机控制中,利用EKF算法可以通过测量电机的电流和电压来估计电机的转速和位置,从而实现无传感器控制。
为了实现EKF算法的仿真模型,一种常用的方法是使用S函数来编写算法。S函数是一种在MATLAB Simulink中使用的自定义函数模块,可以方便地实现自定义的算法模型。通过编写S函数,并结合MATLAB Simulink的搭建环境,可以建立永磁同步电机基于EKF算法的无传感器仿真模型。
在建立仿真模型之前,首先需要对永磁同步电机进行数学建模。数学建模是将物理问题转化为数学方程的过程,对于永磁同步电机来说,可以利用电磁场理论和动力学方程建立数学模型。然后,将数学模型转化为离散时间模型,并结合EKF算法进行仿真模拟。
在仿真模型的建立过程中,需要注意几个关键点。首先,需要选择适当的采样周期,以保证仿真结果的准确性和实时性。其次,需要选择合适的系统参数,如电机的电感、电阻、磁极数等,以保证仿真模型的可靠性和准确性。最后,需要对仿真模型进行验证和优化,以提高模型的性能和稳定性。
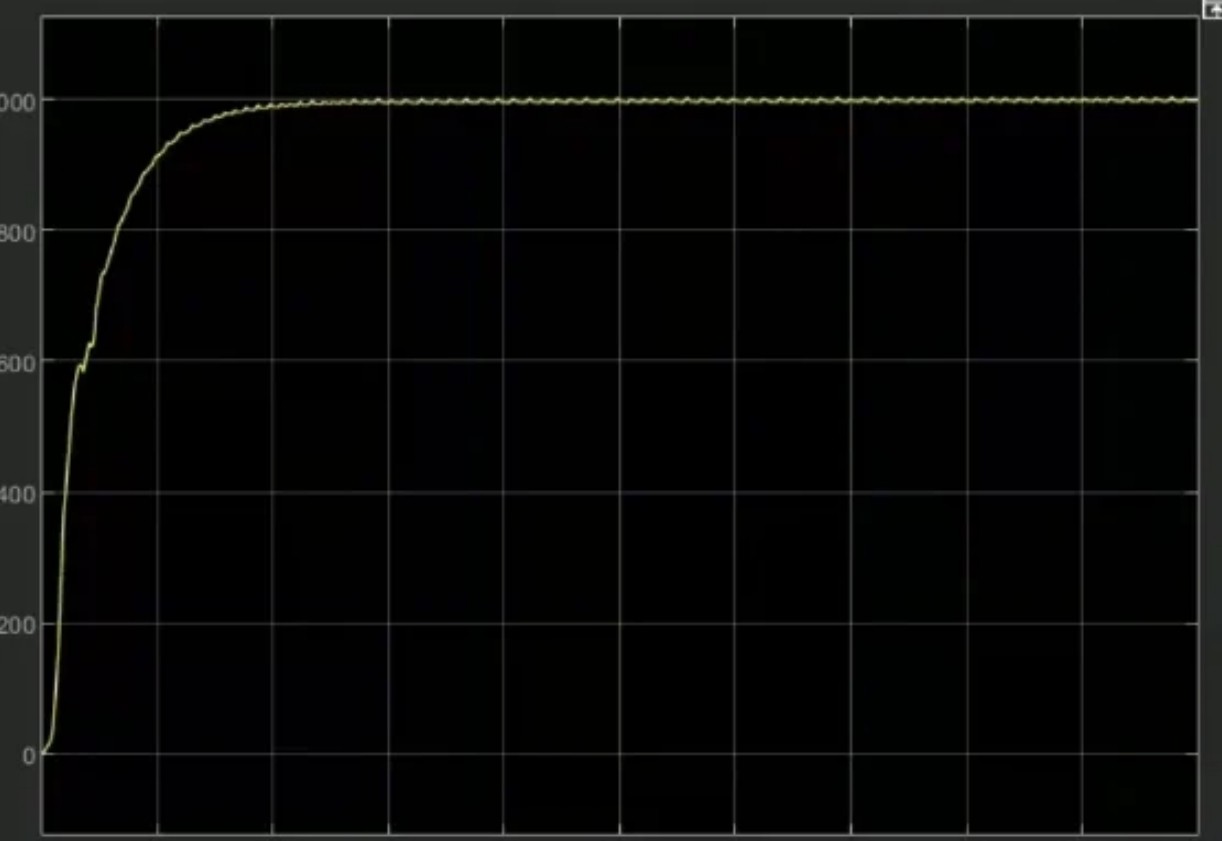
通过对永磁同步电机基于EKF算法的无传感器仿真模型的搭建,可以实现对电机转速和位置的准确估计,并实现对电机的精确控制。这一技术在工业应用中具有重要的意义,可以降低系统成本,提高系统性能。
总之,永磁同步电机基于扩展卡尔曼滤波算法的无传感器仿真模型的搭建是一项具有挑战性的工作。通过使用S函数编写算法,并结合MATLAB Simulink的搭建环境,可以实现对电机转速和位置的准确估计,从而实现对电机的无传感器控制。这一技术的应用将会为工业领域的电机控制带来革命性的改变。
以上相关代码,程序地址:http://fansik.cn/755459494308.html
















 6万+
6万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









