






永磁同步电机,基于扩展卡尔曼滤波算法无传感器仿真模型,s函数编写算法,基于matlab/simulink搭建。
ID:79500737308500497
柔情似水

永磁同步电机是一种智能驱动系统中常见的电机类型之一。它具有高效率、高功率密度和快速响应等优点,在工业自动化领域得到广泛应用。然而,永磁同步电机的控制需要准确的速度和位置测量,传统的传感器方法可能会增加成本和复杂性。
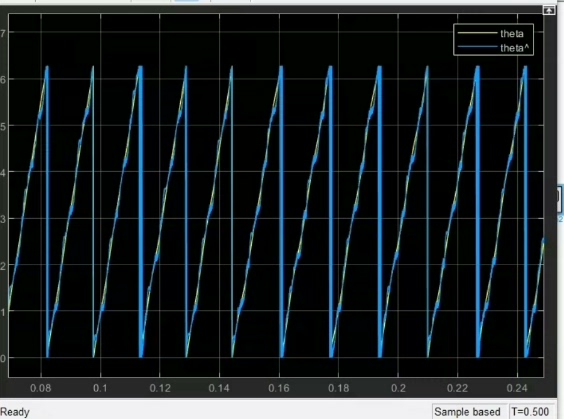
为了解决传感器测量带来的问题,研究人员提出了一种基于扩展卡尔曼滤波算法的无传感器仿真模型。扩展卡尔曼滤波算法是一种常用的状态估计方法,通过将测量误差纳入模型中进行优化,可以实现对永磁同步电机速度和位置的准确估计。
为了实现这一算法,需要编写相应的s函数。s函数是一种在Matlab Simulink中使用的自定义函数,可以实现特定的算法和功能。通过编写基于扩展卡尔曼滤波算法的s函数,我们可以在Matlab Simulink中建立永磁同步电机的仿真模型。
在建立仿真模型的过程中,我们需要考虑永磁同步电机的电气特性、机械特性和控制策略。电气特性包括电机的电感、电阻和磁铁特性等;机械特性包括转子惯量、摩擦力和负载特性等;控制策略包括电流控制、速度控制和位置控制等。
在建立模型的过程中,我们需要根据实际情况进行参数设置和模型调整。具体来说,我们需要根据永磁同步电机的实际参数来设置电气特性和机械特性的参数;同时,我们还需要根据控制要求来选择合适的控制策略和调整参数。
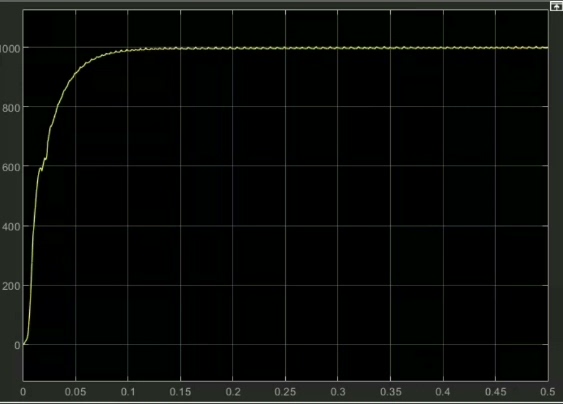
通过基于扩展卡尔曼滤波算法的无传感器仿真模型,我们可以实现对永磁同步电机速度和位置的准确估计。这一模型不仅可以减少传感器的使用,降低成本和复杂性,还可以提高控制系统的鲁棒性和性能。
总之,基于扩展卡尔曼滤波算法无传感器仿真模型的永磁同步电机控制是一种高效、精确的控制方法。通过编写相应的s函数,并在Matlab Simulink中建立仿真模型,我们可以实现对永磁同步电机速度和位置的准确估计。这一技术在工业自动化领域具有重要的应用前景,可以为智能驱动系统的设计和优化提供有力支持。
【相关代码,程序地址】:http://fansik.cn/737308500497.html
















 551
551











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









