








MATLAB实现
trilateration_position.m
% ----------------采用三边定位法对未知节点定位-------------------------------
%{
clc命令是用来清除命令窗口的内容。不管开启多少个应用程序,命令窗口只有一个,
所以clc无论是在脚本m文件或者函数m文件调用时,clc命令都会清除命令窗口的内容。
clear命令可以用来清除工作空间的内容。MATLAB有个基本的工作空间,用base标识,
此外,当打开一个函数m文件时,可能会产生很多工作空间。每一个函数对应一个工作空间。
%}
clear;
maxx = 1000;%参考节点分布的最大横坐标
maxy = 1000;%参考节点分布的最大纵坐标
%----------------------随机初始化三个已知的参考点[cx,cy]-----------------
%{
rand()产生0和1之间均匀分布的随机数
rand(m)产生一个m*m的矩阵,当然矩阵的值是0和1之间均匀分布的随机数
rand(m,n)或者rand([m,n])产生一个m*n的矩阵
randn()产生均值为0, 方差为1的正态分布的随机数。用法和rand类似。
%}
cx = maxx*rand(1,3);
cy = maxy*rand(1,3);
plot(cx,cy,'k^');%参考节点图
%--------随机初始化一个未知节点(mx,my)-----------
mx = maxx*rand();
my = maxy*rand();
hold on;
% 盲节点图
plot(mx,my,'go');
da = sqrt((mx-cx(1))^2+(my-cy(1))^2);
db = sqrt((mx-cx(2))^2+(my-cy(2))^2);
dc = sqrt((mx-cx(3))^2+(my-cy(3))^2);
% 计算定位坐标
[locx,locy] = triposition(cx(1),cy(1),da,cx(2),cy(2),db,cx(3),cy(3),dc);
plot(locx,locy,'r*');
legend('参考节点','盲节点','定位节点','Location','SouthEast');
title('三边测量法的定位');
derror = sqrt((locx-mx)^2 + (locy-my)^2);
disp(derror);
function [locx,locy] = triposition(xa,ya,da,xb,yb,db,xc,yc,dc)
% 三点定位法 %
%输入:
% 1.参考节点A(xa,ya),B(xb,yb),C(xc,yc)
% 2.定位节点D(locx,locy)到这三点的距离分别为da,db,dc
%返回:
% (locx,locy)为计算的定位节点D点的位置坐标
%
syms x y %f符号变量
%--------------求解方程组------------------------------------
f1 = '2*x*(xa-xc)+xc^2-xa^2+2*y*(ya-yc)+yc^2-ya^2=dc^2-da^2';
f2 = '2*x*(xb-xc)+xc^2-xb^2+2*y*(yb-yc)+yc^2-yb^2=dc^2-db^2';
% 解关于x,y的符号方程组,得到解的符号表示,并存入xx,yy
[xx,yy] = solve(f1,f2,x,y);
px = eval(xx); %解的数值px(1),px(2)
py = eval(yy); %解的数值py(1),py(2)
locx = px;
locy = py;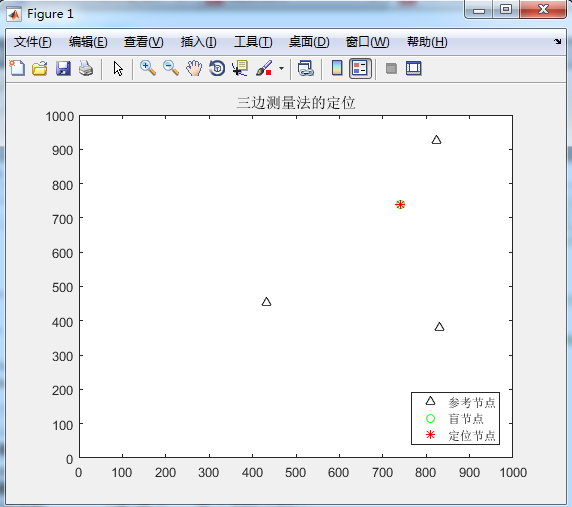















 1248
1248











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









