







《基于stm32的直流有刷电机的控制》PID原理,增量式,位置式
(1)什么是PID:
PID 控制器以各种形式使用超过了 1 世纪,广泛应用在机械设备、气动设备 和电子设备.
在工业应用中PID及其衍生算法是应用最广泛的算法之一,是当之无愧的万能算法。
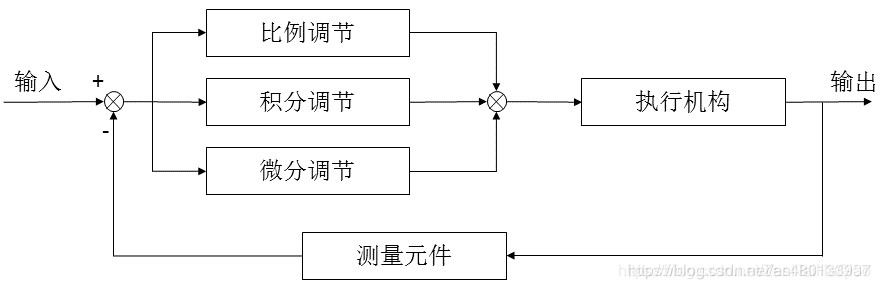
PID 实指“比例 proportional”、“积分 integral”、“微分 derivative”,这三项构 成 PID 基本要素。
每一项完成不同任务,对系统功能产生不同的影响。它的结构简单,参数易 于调整,是控制系统中经常采用的控制算法。
(2)位置式PID与增量式PID
PID控制公式

其中:
u(t) 为控制器输出的控制量;(输出)
e(t)为偏差信号,它等于给定量与输出量之差;(输入)
KP 为比例系数&
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章















 8008
8008











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









