







参考博客:http://blog.csdn.net/yangkunpengd/article/details/51336453
http://www.yalewoo.com/in_triangle_test.html
先说我对找凸包上的点时的理解:
P,A,B三个点,通过叉乘可以得知P,A,B的位置关系
AB × AP = |AB| * |AP| * sin∠PAB.
方向是A到B,A到P。
如果>0,那就是P在线AB左边,<0就是在右边,=0就是在线上。
为什么可以这样判断呢,AB × AP = |AB| * |AP| * sin∠PAB P在AB的左边,则∠PAB在0°到180°之间 sin∠PAB > 0 P在AB右边时,则∠PAB在-180°到0°之间 sin∠PAB < 0 因此,我们只要用AB和AP的叉积的正负,就可以判断P和AB的相对位置(AP相对AB是顺时针还是逆时针旋转)。
这里我想说一下我的理解吧。
为什么说一个点在线的左边就是凸包上的点呢,这个要先规定线的方向,当方向确定才能去说左边,右边。因为p0是最下边的点,通过极角排序后,咱们从X正半轴向上扫,注意叉乘公式,这个公式给了点之间的方向。所以这时候都是以左边称。一个三角形,只有一个点在所有边的左边才能定这个点在凸包内。那出现一个右边的点那就不行。举例来说有很多点,p0,p1,p2,p3…
当你知道了p0,p1是凸包上的点,通过计算发现p2在线p0p1的左边,此时线p0p1的右边是没有点的,当你手绘凸包时,线p0p1右边没有了点,那么当前知道的它左边的点就是凸包上的点,我管这个点叫凸包待定点,因为目前只计算了p2,通过计算p2的下一个点p3可以验证p2到底是不是凸包确定点。
这个是大牛博客的关于Graham算法的解释:
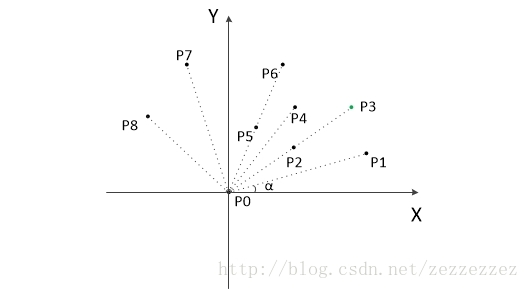
1.把所有点放在二维坐标系中,则纵坐标最小的点一定是凸包上的点,如图中的P0。
2.把所有点的坐标平移一下,使 P0 作为原点,如上图。
3.计算各个点相对于 P0 的幅角 α ,按从小到大的顺序对各个点排序。当 α 相同时,距离 P0 比较近的排在前面。例如上图得到的结果为 P1,P2,P3,P4,P5,P6,P7,P8。我们由几何知识可以知道,结果中第一个点 P1 和最后一个点 P8 一定是凸包上的点。
(以上是准备步骤,以下开始求凸包)
以上,我们已经知道了凸包上的第一个点 P0 和第二个点 P1,我们把它们放在栈里面。现在从步骤3求得的那个结果里,把 P1 后面的那个点拿出来做当前点,即 P2 。接下来开始找第三个点:
4.连接P0和栈顶的那个点,得到直线 L 。看当前点是在直线 L 的右边还是左边。如果在直线的右边就执行步骤5;如果在直线上,或者在直线的左边就执行步骤6。
5.如果在右边,则栈顶的那个元素不是凸包上的点,把栈顶元素出栈。执行步骤4。
6.当前点是凸包上的点,把它压入栈,执行步骤7。
7.检查当前的点 P2 是不是步骤3那个结果的最后一个元素。是最后一个元素的话就结束。如果不是的话就把 P2 后面那个点做当前点,返回步骤4。
关于这个我对于4,5,6的描述不是很理解,我个人觉得是这样,当你已经确定了p0,p1,那么p2是当前点,通过叉乘,计算如果在左边,那么把p2压入栈,这个时候我觉得不能称p2为凸包上的点而是凸包待定点,那么当前点变成了p3,通关验证p1,p2,p3可以知道p2到底是不是凸包确定点,这个图就不是,因为你发现p3是先p1p2的右边点,这个时候当线p1p2外还有其他的点,那么p1p2一定不是凸包上的边,p1已经确定是凸包上的点了,那么p2一定不是凸包确定点,弹出p2。这时就要计算p0,p1,p3的叉乘了,结果的值p3在线p0p1的左边,那么p3变成了新的凸包待定点。 就这样计算看这个点是要弹出还是要变为确定点,要变成确定点就进行下一个点,就验证其他点。
补充一点!!!我来更新我的博客了,我今年又复习了下凸包,发现一个问题
while(cross(p[top-1],p[top],a[i])<0&&top)这个语句如果是这样写的话会把所有凸包上的点都记录下来,一条线段上的共线点也会记录下来。如果是 while(cross(a[i],p[top],p[top-1])<0&&top)那么P数组只会记录顶点。第一个写稳定凸包问题但是不能写旋转卡壳的求凸包直径的题,第二个题不能写稳定凸包,可以写凸包直径。自己斟酌吧,两个板子都放一下
模板:
#include<stdio.h>
#include<math.h>
#include<string.h>
#include<algorithm>
using namespace std;
struct node
{
int x,y;
} a[105],p[105];
int top,n;
double cross(node p0,node p1,node p2)//计算叉乘,注意p0,p1,p2的位置,这个决定了方向
{
return (p1.x-p0.x)*(p2.y-p0.y)-(p1.y-p0.y)*(p2.x-p0.x);
}
double dis(node a,node b)//计算距离,这个用在了当两个点在一条直线上
{
return sqrt((a.x-b.x)*(a.x-b.x)+(a.y-b.y)*(a.y-b.y));
}
bool cmp(node p1,node p2)//极角排序
{
double z=cross(a[0],p1,p2);
if(z>0||(z==0&&dis(a[0],p1)<dis(a[0],p2)))
return 1;
return 0;
}
void Graham()
{
int k=0;
for(int i=0; i<n; i++)
if(a[i].y<a[k].y||(a[i].y==a[k].y&&a[i].x<a[k].x))
k=i;
swap(a[0],a[k]);//找p[0]
sort(a+1,a+n,cmp);
top=1;
p[0]=a[0];
p[1]=a[1];
for(int i=2; i<n; i++)//控制进栈出栈
{
while(cross(p[top-1],p[top],a[i])<0&&top)
top--;
top++;
p[top]=a[i];
}
}
int main()
{
int m;
scanf("%d",&m);
while(m--)
{
scanf("%d",&n);
for(int i=0; i<n; i++)
{
scanf("%d%d",&a[i].x,&a[i].y);
}
Graham();
for(int i=0; i<=top; i++)
{
printf("%d %d\n",p[i].x,p[i].y);
}
}
return 0;
}
这是第二个
#include<stdio.h>
#include<math.h>
#include<string.h>
#include<algorithm>
using namespace std;
struct node
{
int x,y;
} a[105],p[105];
int top,n;
double cross(node p0,node p1,node p2)//计算叉乘,注意p0,p1,p2的位置,这个决定了方向
{
return (p1.x-p0.x)*(p2.y-p0.y)-(p1.y-p0.y)*(p2.x-p0.x);
}
double dis(node a,node b)//计算距离,这个用在了当两个点在一条直线上
{
return sqrt((a.x-b.x)*(a.x-b.x)+(a.y-b.y)*(a.y-b.y));
}
bool cmp(node p1,node p2)//极角排序
{
double z=cross(a[0],p1,p2);
if(z>0||(z==0&&dis(a[0],p1)<dis(a[0],p2)))
return 1;
return 0;
}
void Graham()
{
int k=0;
for(int i=0; i<n; i++)
if(a[i].y<a[k].y||(a[i].y==a[k].y&&a[i].x<a[k].x))
k=i;
swap(a[0],a[k]);//找p[0]
sort(a+1,a+n,cmp);
top=1;
p[0]=a[0];
p[1]=a[1];
for(int i=2; i<n; i++)//控制进栈出栈
{
while(cross(a[i],p[top],p[top-1])>=0&&top)
top--;
top++;
p[top]=a[i];
}
}
int main()
{
int m;
scanf("%d",&m);
while(m--)
{
scanf("%d",&n);
for(int i=0; i<n; i++)
{
scanf("%d%d",&a[i].x,&a[i].y);
}
Graham();
for(int i=0; i<=top; i++)
{
printf("%d %d\n",p[i].x,p[i].y);
}
}
return 0;
}















 1822
1822

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









