







把以前学习的知识重新整理一下,首先通过OpenCV霍夫线变换提取图像直线,分别取线上两点,通过计算线的斜率,从而计算角度。
1、霍夫线变换
opencv支持两种不同的霍夫变换:标准霍夫变换(SHT)和累积概率霍夫变换(PPHT)。在opencv中可以使用同一个函数来使用两种算法。
相关函数如下:
void HoughLinesP(InputArray image,OutputArray lines, double rho, double theta, int threshold, double minLineLength=0,double maxLineGap=0 )
image为输入图像,要求是单通道,8位图像
lines为输出参数,4个元素表示,即直线的起始和终止端点的4个坐标(x1,y1),(x2,y2)
rho为距离分辨率,一般为1
heta为角度的分辨率,一般CV_PI/180
threshold为阈值,hough变换图像空间值最大点,大于则执行
minLineLength为最小直线长度(像素),即如果小于该值,则不被认为是一条直线
maxLineGap为直线间隙最大值,如果两条直线间隙大于该值,则被认为是两条线段,否则是一条。
也可以通过其他方法去找边线的点坐标,如角点查找。
2、公式计算
先分别求取线斜率K1,K2,然后带进公式计算角度。
k = (k2 - k1) / (1 + k1*k2);
angle = atan(k) * 180 / PI;
3、代码如下
Mat src = imread("D:/images/line_0.jpg");
Mat gray,blur, canny, binary;
cvtColor(src, gray, COLOR_BGR2GRAY);
GaussianBlur(gray, blur, Size(3, 3), 0, 0);
//Canny(blur, canny, 20, 255, 3);
threshold(blur, binary, 20, 255, THRESH_BINARY_INV | THRESH_OTSU);
vector<Vec4i>lines;
double x1,x2,y1,y2, k1, k2, k,angle = 0.0;
HoughLinesP(binary, lines, 1, CV_PI / 180, 20, 100, 2);
for (size_t i = 0; i < lines.size(); i++) {
//Vec4i ln = lines[i];
line(src, Point(lines[i][0], lines[i][1]), Point(lines[i][2], lines[i][3]), Scalar(255, 0, 0), 1, 8);
cout << i << endl;
}
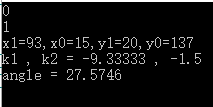
cout << "x1=" << lines[1][1] << "," << "x0=" << lines[1][0] << "," << "y1=" << lines[1][3] << "," << "y0=" << lines[1][2] << endl;
x1 = lines[0][1] - lines[0][0];
y1 = lines[0][3] - lines[0][2];
k1 = y1 / x1;
x2 = lines[1][1] - lines[1][0];
y2 = lines[1][3] - lines[1][2];
k2 = y2 / x2;
cout <<"k1 , k2 = "<< k1 <<" , "<<k2<< endl;
k = (k2 - k1) / (1 + k1*k2);
angle = atan(k) * 180 / PI;
cout <<"angle = "<< angle<< endl;
4、结果实现
原图:
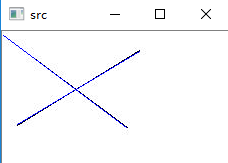
结果:















 3207
3207











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









