







基本思想:学习oak双目相机的使用复现官网demo和简单的人脸检测
前言:
设备型号:OAK-D-Pro
一、环境配置参考
台式机ubuntu系统调用OAK相机_MFT小白的博客-CSDN博客
二、测试
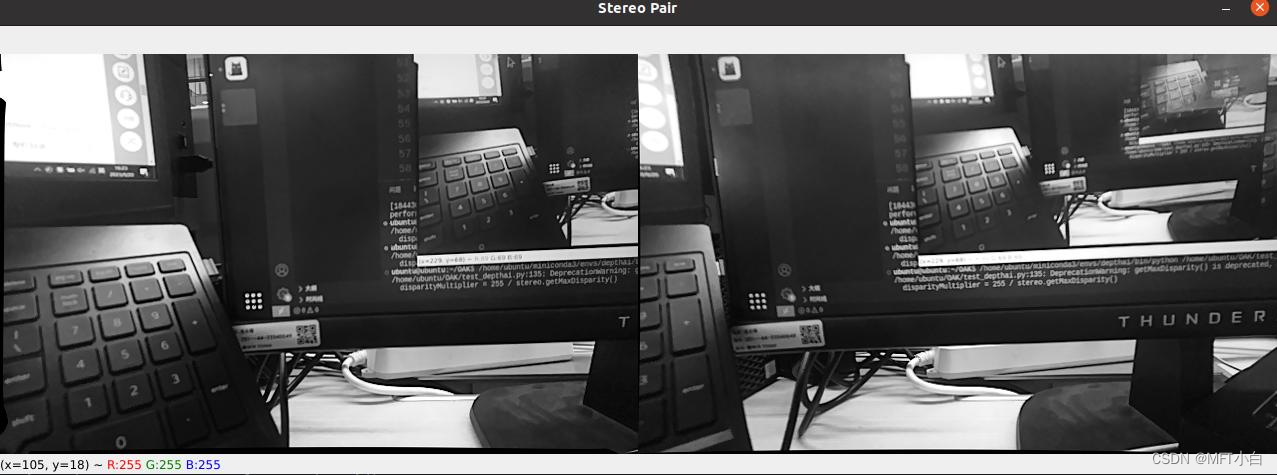
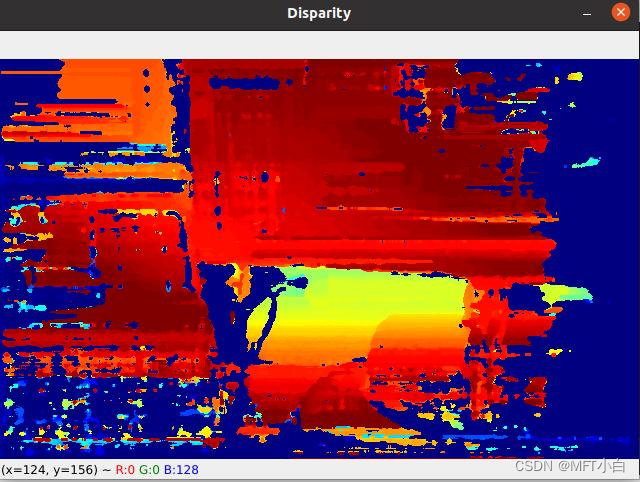
2.1 test_depthai.py
按下 t 键可实现图像切换,观察视差。
import depthai as dai
import cv2
import numpy as np
# # 实例化管道对象
# pipeline = dai.Pipeline()
# mono = pipeline.createMonoCamera()
# mono.setBoardSocket(dai.CameraBoardSocket.LEFT)
# xout = pipeline.createXLinkOut()
# xout.setStreamName("left")
# mono.out.link(xout.input)
# with dai.Device(pipeline) as device:
# queue = device.getOutputQueue(name="left")
# frame = queue.get()
# imOut = frame.getCvFrame()
# cv2.imshow("imOut", imOut)
# cv2.waitKey()
def getFrame(queue):
# Get frame from queue
frame = queue.get()
# Convert frame to OpenCV format and return
return frame.getCvFrame()
def getMonoCamera(pipeline, isLeft):
# Configure mono camera
mono = pipeline.createMonoCamera()
# Set Camera Resolution
mono.setResolution(dai.MonoCameraProperties.SensorResolution.THE_400_P)
if isLeft:
# Get left camera
mono.setBoardSocket(dai.CameraBoardSocket.LEFT)
else :
# Get right camera
mono.setBoardSocket(dai.CameraBoardSocket.RIGHT)
return mono
def getStereoPair(pipeline, monoLeft, monoRight):
# Configure stereo pair for depth estimation
stereo = pipeline.createStereoDepth()
# Checks occluded pixels and marks them as invalid
stereo.setLeftRightCheck(True)
# Configure left and right cameras to work as a stereo pair
monoLeft.out.link(stereo.left)
monoRight.out.link(stereo.right)
return stereo
def mouseCallback(event, x, y, flags, param):
global mouseX, mouseY
if event == cv2.EVENT_LBUTTONDOWN:
mouseX = x
mouseY = y
if __name__ == '__main__':
# pipeline = dai.Pipeline()
# # Set up left and right cameras
# monoLeft = getMonoCamera(pipeline, isLeft = True)
# monoRight = getMonoCamera(pipeline, isLeft = False)
# # Set output Xlink for left camera
# xoutLeft = pipeline.createXLinkOut()
# xoutLeft.setStreamName("left")
# # Set output Xlink for right camera
# xoutRight = pipeline.createXLinkOut()
# xoutRight.setStreamName("right")
# # Attach cameras to output Xlink
# monoLeft.out.link(xoutLeft.input)
# monoRight.out.link(xoutRight.input)
mouseX = 0
mouseY = 640
# Start defining a pipeline
pipeline = dai.Pipeline()
# Set up left and right cameras
monoLeft = getMonoCamera(pipeline, isLeft=True)
monoRight = getMonoCamera(pipeline, isLeft=False)
# Combine left and right cameras to form a stereo pair
stereo = getStereoPair(pipeline, monoLeft, monoRight)
xoutDisp = pipeline.createXLinkOut()
xoutDisp.setStreamName("disparity")
xoutRectifiedLeft = pipeline.createXLinkOut()
xoutRectifiedLeft.setStreamName("rectifiedLeft")
xoutRectifiedRight = pipeline.createXLinkOut()
xoutRectifiedRight.setStreamName("rectifiedRight")
stereo.disparity.link(xoutDisp.input)
stereo.rectifiedLeft.link(xoutRectifiedLeft.input)
stereo.rectifiedRight.link(xoutRectifiedRight.input)
with dai.Device(pipeline) as device:
# Output queues will be used to get the rgb frames and nn data
# from the outputs defined above
disparityQueue = device.getOutputQueue(name="disparity",
maxSize=1, blocking=False)
rectifiedLeftQueue = device.getOutputQueue(name="rectifiedLeft",
maxSize=1, blocking=False)
rectifiedRightQueue=device.getOutputQueue(name="rectifiedRight",
maxSize=1, blocking=False)
# Calculate a multiplier for color mapping disparity map
disparityMultiplier = 255 / stereo.getMaxDisparity()
cv2.namedWindow("Stereo Pair")
cv2.setMouseCallback("Stereo Pair", mouseCallback)
# Variable use to toggle between side by side view and one frame
# view.
sideBySide = False
while True:
# Get the disparity map.
disparity = getFrame(disparityQueue)
# Colormap disparity for display.
disparity = (disparity *
disparityMultiplier).astype(np.uint8)
disparity = cv2.applyColorMap(disparity, cv2.COLORMAP_JET)
# Get the left and right rectified frame.
leftFrame = getFrame(rectifiedLeftQueue);
rightFrame = getFrame(rectifiedRightQueue)
if sideBySide:
# Show side by side view.
imOut = np.hstack((leftFrame, rightFrame))
else:
# Show overlapping frames.
imOut = np.uint8(leftFrame / 2 + rightFrame / 2)
# Convert to RGB.
imOut = cv2.cvtColor(imOut, cv2.COLOR_GRAY2RGB)
# Draw scan line.
imOut = cv2.line(imOut, (mouseX, mouseY),
(1280, mouseY), (0, 0, 255), 2)
# Draw clicked point.
imOut = cv2.circle(imOut, (mouseX, mouseY), 2,
(255, 255, 128), 2)
cv2.imshow("Stereo Pair", imOut)
cv2.imshow("Disparity", disparity)
# Check for keyboard input
key = cv2.waitKey(1)
if key == ord('q') or key == 27:
# Quit when q is pressed
break
elif key == ord('t'):
# Toggle display when t is pressed
sideBySide = not sideBySide效果图
2.2 test_model_depthai.py
模型下载地址:Index of blobconverter-backup/blobs
import depthai as dai
import cv2
import time
import blobconverter
import numpy as np
FRAME_SIZE = (640, 360)
DET_INPUT_SIZE = (300, 300)
# model_name = "face-detection-retail-0004"
# zoo_type = "depthai"
blob_path = "face-detection-retail-0004_openvino_2021.4_10shave.blob"
pipeline = dai.Pipeline()
# 定义RGB
cam = pipeline.createColorCamera()
cam.setPreviewSize(FRAME_SIZE[0], FRAME_SIZE[1])
cam.setInterleaved(False)
cam.setResolution(dai.ColorCameraProperties.SensorResolution.THE_1080_P)
cam.setBoardSocket(dai.CameraBoardSocket.RGB)
# 定义左相机
mono_left = pipeline.createMonoCamera()
mono_left.setResolution(dai.MonoCameraProperties.SensorResolution.THE_400_P)
mono_left.setBoardSocket(dai.CameraBoardSocket.LEFT)
# 定义右相机
mono_right = pipeline.createMonoCamera()
mono_right.setResolution(dai.MonoCameraProperties.SensorResolution.THE_400_P)
mono_right.setBoardSocket(dai.CameraBoardSocket.RIGHT)
# 创建stereo node
stereo = pipeline.createStereoDepth()
# 深度相机输出连接stereo node
mono_left.out.link(stereo.left)
mono_right.out.link(stereo.right)
# 使用blobconverter获取模型blob文件
# if model_name is not None:
# blob_path = blobconverter.from_zoo(
# name=model_name,
# shaves=6,
# zoo_type=zoo_type
# )
# 定义人脸检测神经网络节点及参数
face_spac_det_nn = pipeline.createMobileNetSpatialDetectionNetwork()
face_spac_det_nn.setConfidenceThreshold(0.75)
face_spac_det_nn.setBlobPath(blob_path)
face_spac_det_nn.setDepthLowerThreshold(100)
face_spac_det_nn.setDepthUpperThreshold(5000)
# 定义人脸检测输入配置
face_det_manip = pipeline.createImageManip()
face_det_manip.initialConfig.setResize(DET_INPUT_SIZE[0], DET_INPUT_SIZE[1])
face_det_manip.initialConfig.setKeepAspectRatio(False)
# 连接 rgb --> ImageManip node -> net
# stereo --> net
cam.preview.link(face_det_manip.inputImage)
face_det_manip.out.link(face_spac_det_nn.input)
stereo.depth.link(face_spac_det_nn.inputDepth)
# 创建预览输出
x_preview_out = pipeline.createXLinkOut()
x_preview_out.setStreamName("preview")
cam.preview.link(x_preview_out.input)
# 创建检测输出
det_out = pipeline.createXLinkOut()
det_out.setStreamName("det_out")
face_spac_det_nn.out.link(det_out.input)
# 输出视差图
xoutDisp = pipeline.createXLinkOut()
xoutDisp.setStreamName("disparity")
stereo.disparity.link(xoutDisp.input)
# 定义显示功能
def display_info(frame, disparity, bbox, coordinates, status, status_color, fps):
# Display bounding box
cv2.rectangle(frame, bbox, status_color[status], 2)
cv2.rectangle(disparity, bbox, status_color[status], 2)
# Display coordinates
if coordinates is not None:
coord_x, coord_y, coord_z = coordinates
cv2.putText(frame, f"X: {int(coord_x)} mm", (bbox[0] + 10, bbox[1] + 20), cv2.FONT_HERSHEY_TRIPLEX, 0.5, 255)
cv2.putText(frame, f"Y: {int(coord_y)} mm", (bbox[0] + 10, bbox[1] + 35), cv2.FONT_HERSHEY_TRIPLEX, 0.5, 255)
cv2.putText(frame, f"Z: {int(coord_z)} mm", (bbox[0] + 10, bbox[1] + 50), cv2.FONT_HERSHEY_TRIPLEX, 0.5, 255)
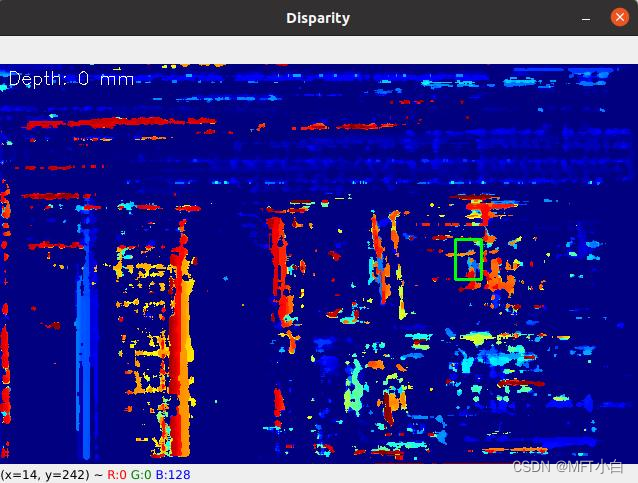
cv2.putText(disparity, f"Depth: {int(coord_z)} mm", (10, 20), cv2.FONT_HERSHEY_SIMPLEX, 0.6, (255, 255, 255))
# Create background for showing details
cv2.rectangle(frame, (5, 5, 175, 100), (50, 0, 0), -1)
# Display authentication status on the frame
cv2.putText(frame, status, (20, 40), cv2.FONT_HERSHEY_SIMPLEX, 0.5, status_color[status])
# Display instructions on the frame
cv2.putText(frame, f'FPS: {fps:.2f}', (20, 80), cv2.FONT_HERSHEY_SIMPLEX, 0.6, (255, 255, 255))
# Frame count
frame_count = 0
# Placeholder fps value
fps = 0
# Used to record the time when we processed last frames
prev_frame_time = 0
# Used to record the time at which we processed current frames
new_frame_time = 0
# Set status colors
status_color = {
'Face Detected': (0, 255, 0),
'No Face Detected': (0, 0, 255)
}
# Start pipeline
with dai.Device(pipeline) as device:
# Output queue will be used to get the right camera frames from the outputs defined above
q_cam = device.getOutputQueue(name="preview", maxSize=1, blocking=False)
# Output queue will be used to get nn data from the video frames.
q_det = device.getOutputQueue(name="det_out", maxSize=1, blocking=False)
disparityQueue = device.getOutputQueue(name="disparity", maxSize=1, blocking=False)
disparityMultiplier = 255 / stereo.getMaxDisparity()
# # Output queue will be used to get nn data from the video frames.
# q_bbox_depth_mapping = device.getOutputQueue(name="bbox_depth_mapping_out", maxSize=4, blocking=False)
while True:
# Get right camera frame
in_cam = q_cam.get()
frame = in_cam.getCvFrame()
disparity_ = disparityQueue.get()
disparity = disparity_.getCvFrame()
disparity = (disparity * disparityMultiplier).astype(np.uint8)
disparity = cv2.applyColorMap(disparity, cv2.COLORMAP_JET)
bbox = None
coordinates = None
inDet = q_det.tryGet()
if inDet is not None:
detections = inDet.detections
# if face detected
if len(detections) is not 0:
detection = detections[0]
# Correct bounding box
xmin = max(0, detection.xmin)
ymin = max(0, detection.ymin)
xmax = min(detection.xmax, 1)
ymax = min(detection.ymax, 1)
# Calculate coordinates
x = int(xmin*FRAME_SIZE[0])
y = int(ymin*FRAME_SIZE[1])
w = int(xmax*FRAME_SIZE[0]-xmin*FRAME_SIZE[0])
h = int(ymax*FRAME_SIZE[1]-ymin*FRAME_SIZE[1])
bbox = (x, y, w, h)
# Get spacial coordinates
coord_x = detection.spatialCoordinates.x
coord_y = detection.spatialCoordinates.y
coord_z = detection.spatialCoordinates.z
coordinates = (coord_x, coord_y, coord_z)
# Check if a face was detected in the frame
if bbox:
# Face detected
status = 'Face Detected'
else:
# No face detected
status = 'No Face Detected'
# Display info on frame
display_info(frame, disparity, bbox, coordinates, status, status_color, fps)
# Calculate average fps
if frame_count % 10 == 0:
# Time when we finish processing last 100 frames
new_frame_time = time.time()
# Fps will be number of frame processed in one second
fps = 1 / ((new_frame_time - prev_frame_time)/10)
prev_frame_time = new_frame_time
# Capture the key pressed
key_pressed = cv2.waitKey(1) & 0xff
# Stop the program if Esc key was pressed
if key_pressed == 27 or key_pressed == ord('q'):
break
# Display the final frame
cv2.imshow("Face Cam", frame)
cv2.imshow("Disparity", disparity)
# Increment frame count
frame_count += 1
cv2.destroyAllWindows()
效果图:















 442
442











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









