







 本文介绍了机器人中的坐标系概念,如BaseFrame、WorldFrame、工具坐标系和工件坐标系,以及在移动机器人系统中的坐标系管理。重点讲解了ROS中的TF功能,包括命令行操作、静态TF广播、动态TF监听和海龟跟随示例。通过实例演示了如何使用TF进行坐标变换和动态管理,以及如何利用rviz进行可视化展示。
本文介绍了机器人中的坐标系概念,如BaseFrame、WorldFrame、工具坐标系和工件坐标系,以及在移动机器人系统中的坐标系管理。重点讲解了ROS中的TF功能,包括命令行操作、静态TF广播、动态TF监听和海龟跟随示例。通过实例演示了如何使用TF进行坐标变换和动态管理,以及如何利用rviz进行可视化展示。
TF:机器人坐标系管理神器
1.机器人中的坐标系
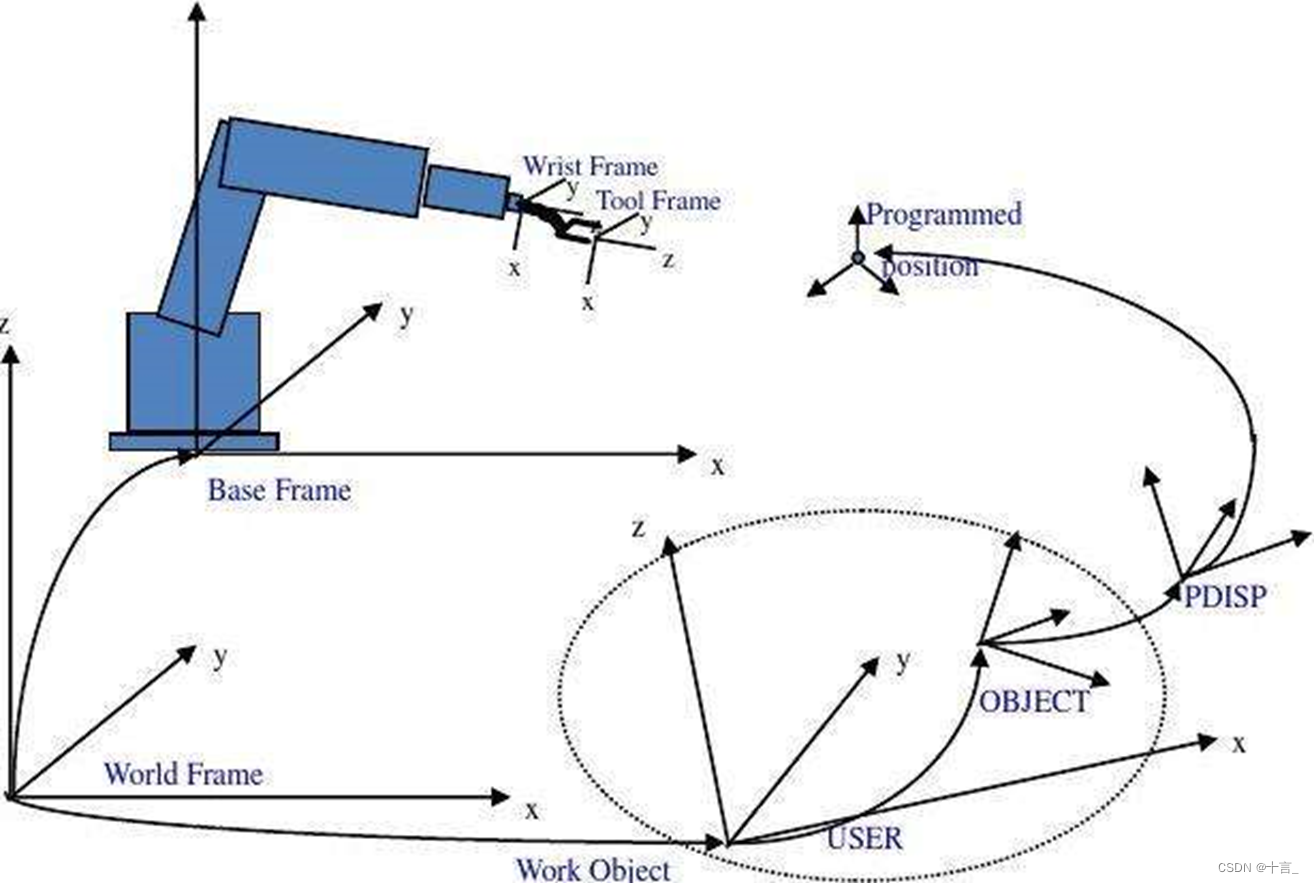
机器人安装位置基坐标系(Base Frame),机器人安装位置在外部环境下的参考系叫做世界坐标系(World Frame),机器人末端夹子的位置叫做工具坐标系,外部被操作物体的位置叫做工件坐标系,机械臂在抓取物体的过程中,这些坐标系之间的关系也会跟随变化。
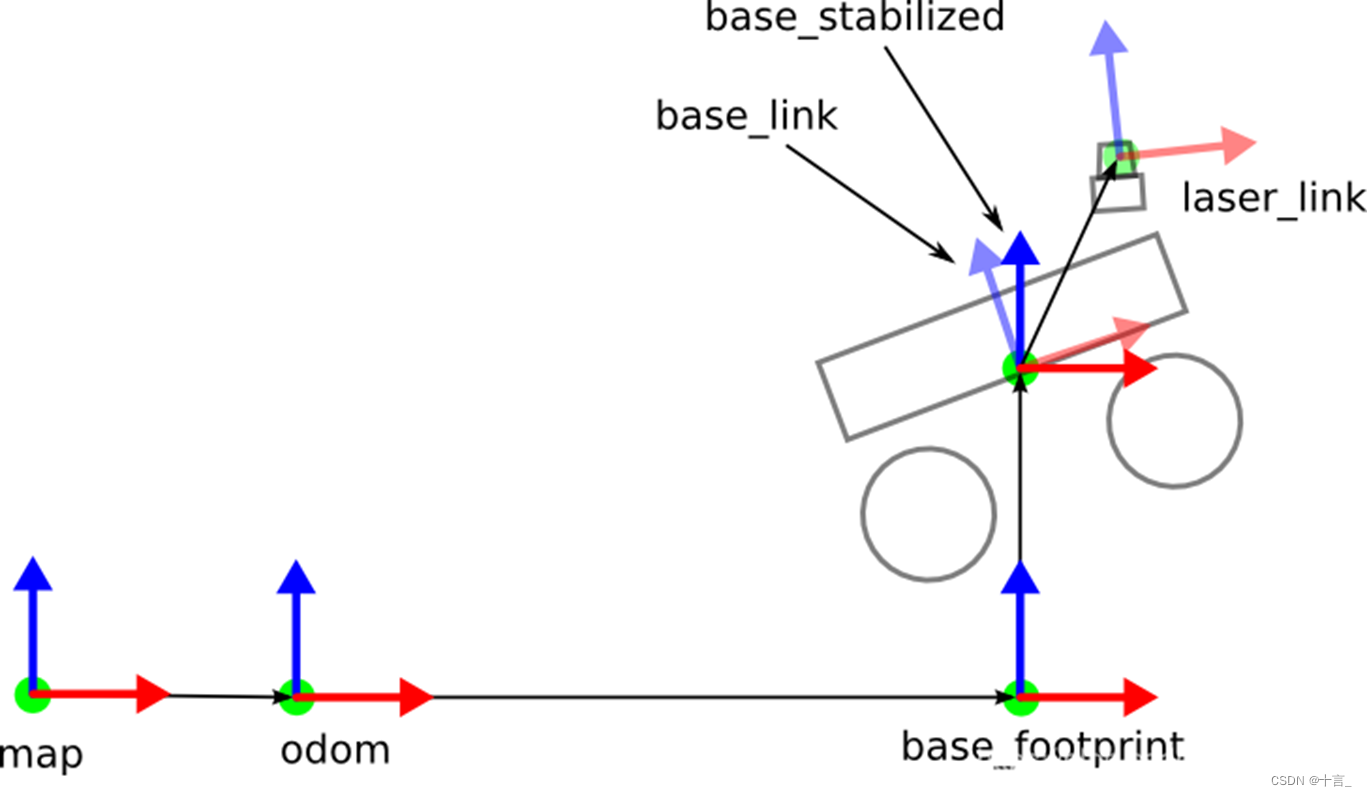
在移动机器人系统中,坐标系一样至关重要,比如一个移动机器人的中心点是基坐标系Base Link,雷达所在的位置叫做雷达坐标系laser link,机器人要移动,里程计会累积位置,这个位置的参考系叫做里程计坐标系odom,里程计又会有累积误差和漂移,绝对位置的参考系叫做地图坐标系map。
一层一层坐标系之间关系十分复杂,有一些是相对固定的,也有一些是不断变化的,良好的坐标系管理系统显得格外重要
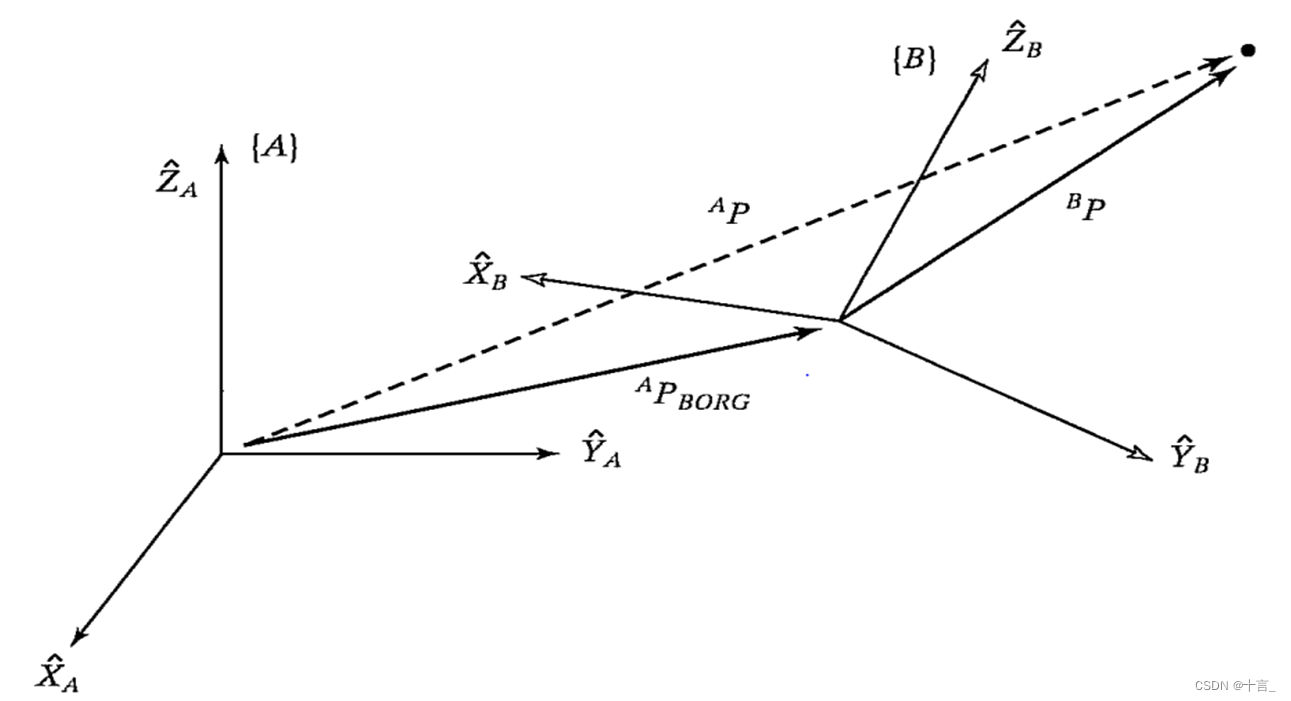
坐标系变化可以分为平移和旋转两部分,通过四乘四的矩阵进行描述,在空间中画出坐标系,两者之间的变换关系,其实就是向量的数学描述
ROS中TF功能的底层原理,就是对这些数学变换进行了封装
2.TF命令行操作
- 小乌龟跟随例程
需要先安装相应的功能包,然后就可以通过launch文件启动,之后我们可以控制其中的一只小海龟,另外一只小海龟会自动跟随运动
安装功能包
$ sudo apt install ros-humble-turtle-tf2-py ros-humble-tf2-tools
$ sudo pip3 install transforms3d
运行launch文件
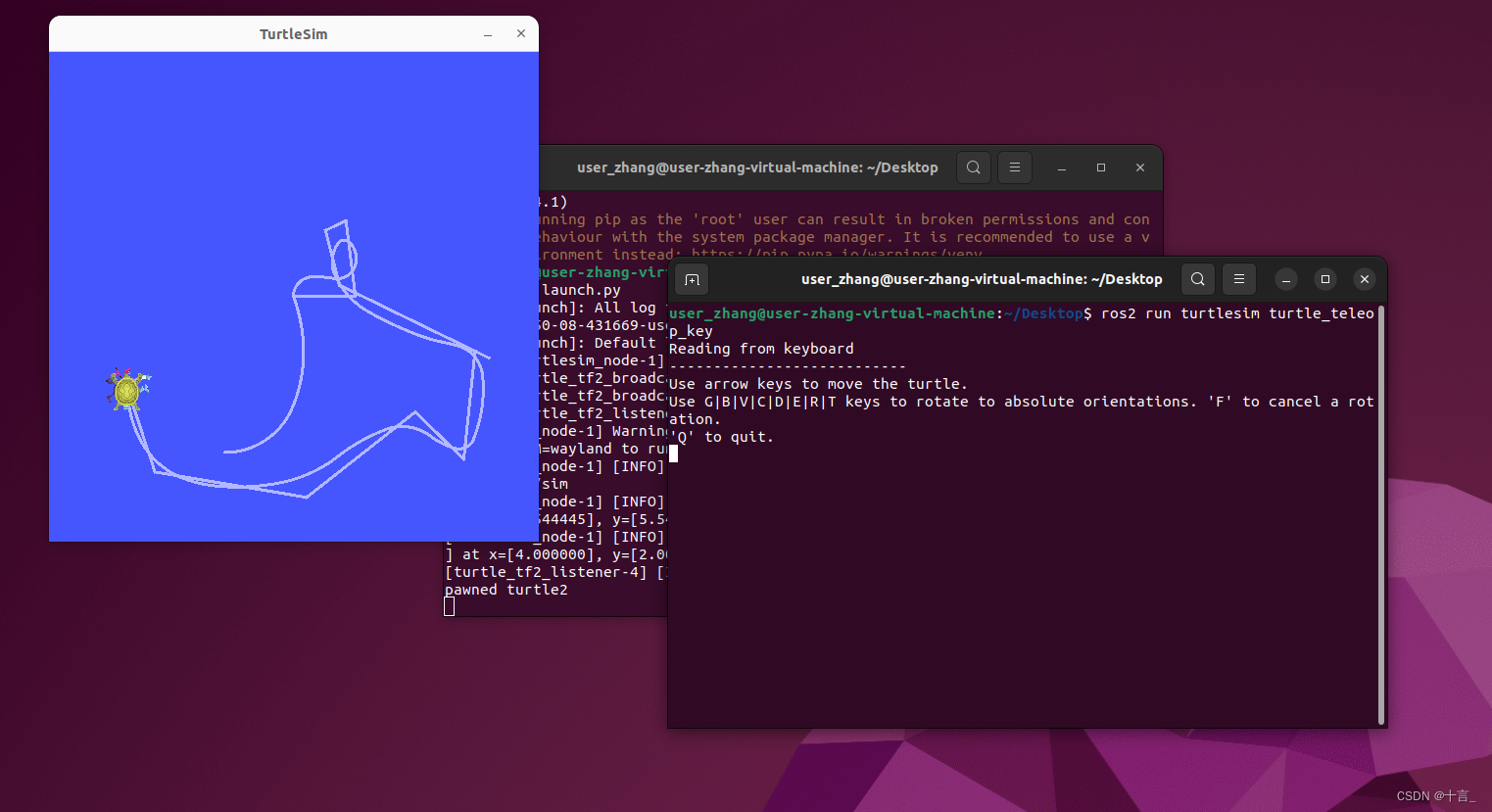
$ ros2 launch turtle_tf2_py turtle_tf2_demo.launch.py
$ ros2 run turtlesim turtle_teleop_key
当我们控制一只海龟运动时,另外一只海龟也会跟随运动
查看TF树
可以借助工具来查看两只小海龟有哪些坐标系
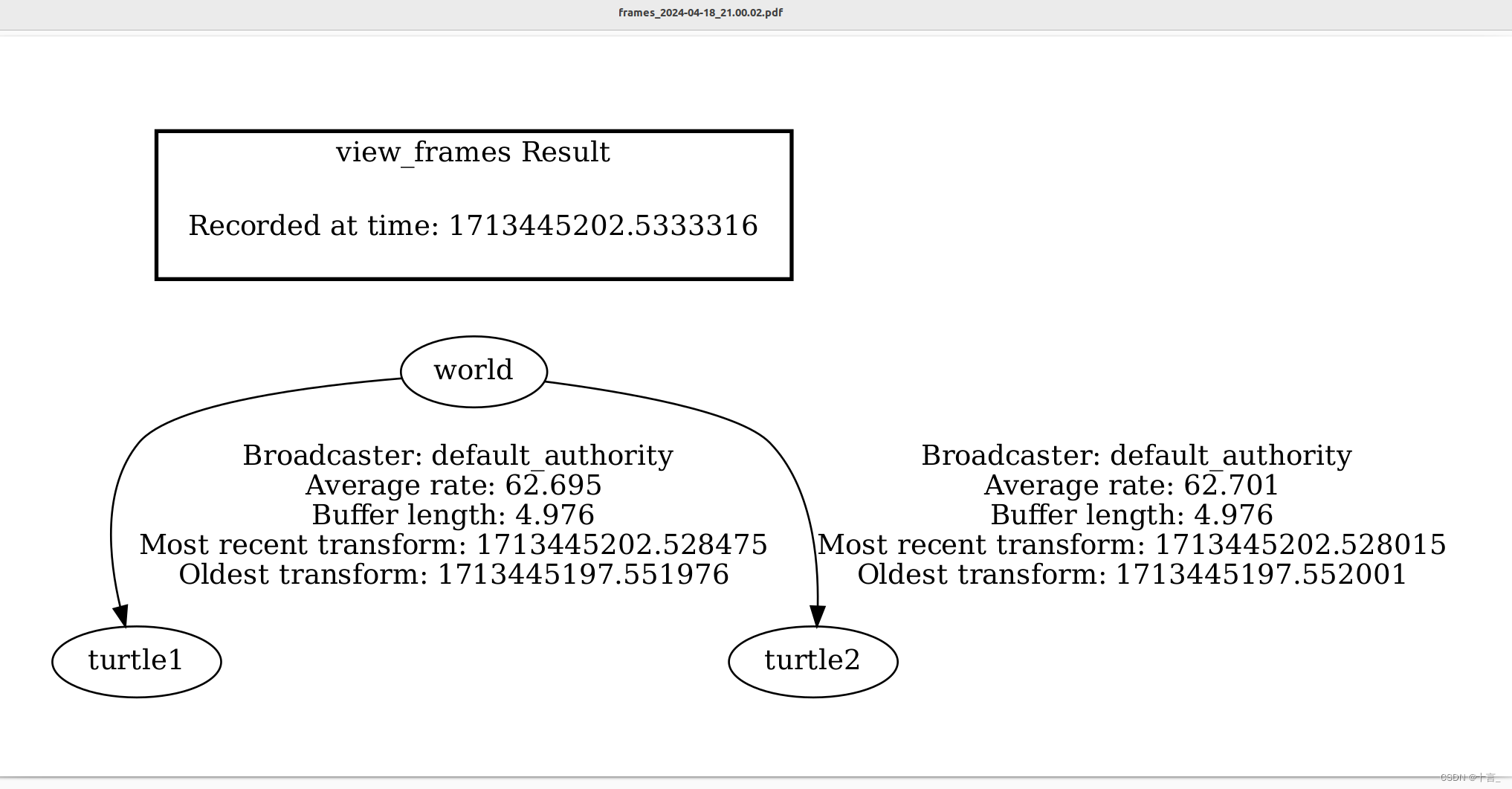
$ ros2 run tf2_tools view_frames
默认在当前终端路径下生成一个frames.pdf文件,打开之后可以看到系统中各个坐标系的关系 world坐标系在左下角,turtle1和turtle2分别在两只小海龟的中心点,随着运动,turtle1与turtle2相对于world坐标系会随之变化
查询坐标变换信息
通过tf2_echo这个工具可以查看两个坐标系之间的具体关系,而不是仅仅看到坐标系的结构
查看turtle2相对于turtle1的坐标变换
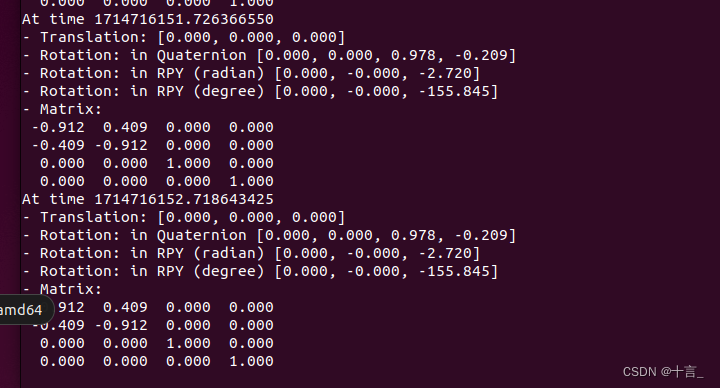
$ ros2 run tf2_ros tf2_echo turtle2 turtle1
旋转有三种描述方式:1.四元素 2.欧拉角的弧度值 3.欧拉角的角度值
坐标系可视化
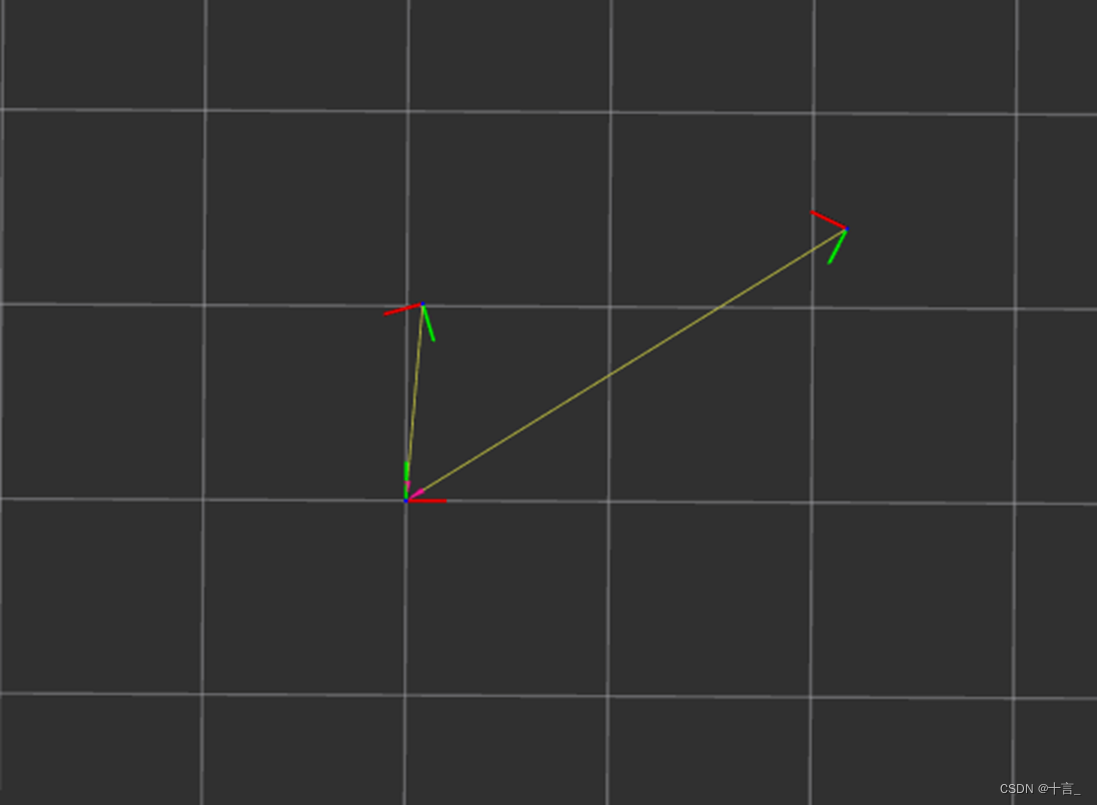
借用rviz可视化工具来进一步明显的查看两只小乌龟的坐标变换
$ ros2 run rviz2 rviz2 -d $(ros2 pkg prefix --share turtle_tf2_py)/rviz/turtle_rviz.rviz
3.静态TF广播
TF的主要作用是对坐标系进行管理,那就管理一个试试呗?
坐标变换中最为简单的应该是相对位置不发生变化的情况,比如你家的房子在哪个位置,只要房子不拆,这个坐标应该就不会变化。
在机器人系统中也很常见,比如激光雷达和机器人底盘之间的位置关系,安装好之后基本不会变化。
在TF中,这种情况也称之为静态TF变换,我们来看看在程序中该如何实现?
$ ros2 run learning_tf static_tf_broadcaster
$ ros2 run tf2_tools view_frames
可以看到当前系统中存在两个坐标系,一个是world,一个是house,两者之间的相对位置不会发生改变,通过一个静态的TF对象进行维护。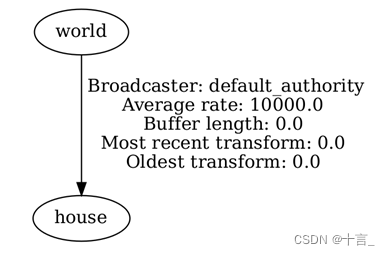
代码解析
代码中是如何创建坐标系并且发布静态变换?
learning_tf/static_tf_broadcaster.py
import rclpy # ROS2 Python接口库
from rclpy.node import Node # ROS2 节点类
from geometry_msgs.msg import TransformStamped # 坐标变换消息
import tf_transformations # TF坐标变换库
from tf2_ros.static_transform_broadcaster import StaticTransformBroadcaster # TF静态坐标系广播器类
class StaticTFBroadcaster(Node):
def __init__(self, name):
super().__init__(name) # ROS2节点父类初始化
self.tf_broadcaster = StaticTransformBroadcaster(self) # 创建一个静态TF广播器对象,将TF消息广播出去
static_transformStamped = TransformStamped() # 创建一个坐标变换的消息对象
static_transformStamped.header.stamp = self.get_clock().now().to_msg() # 设置坐标变换消息的时间戳,告诉ROS2系统当前变换关系是在哪一个时间点的信息
static_transformStamped.header.frame_id = 'world' # 设置一个坐标变换的源坐标系
static_transformStamped.child_frame_id = 'house' # 设置一个坐标变换的目标坐标系
static_transformStamped.transform.translation.x = 10.0 # 设置坐标变换中的X、Y、Z向的平移
static_transformStamped.transform.translation.y = 5.0
static_transformStamped.transform.translation.z = 0.0
quat = tf_transformations.quaternion_from_euler(0.0, 0.0, 0.0) # 将欧拉角转换为四元数(roll, pitch, yaw)
static_transformStamped.transform.rotation.x = quat[0] # 设置坐标变换中的X、Y、Z向的旋转(四元数)
static_transformStamped.transform.rotation.y = quat[1]
static_transformStamped.transform.rotation.z = quat[2]
static_transformStamped.transform.rotation.w = quat[3]
self.tf_broadcaster.sendTransform(static_transformStamped) # 广播静态坐标变换,将两个坐标系之间的位置关系广播出去,广播后两个坐标系的位置关系保持不变
def main(args=None):
rclpy.init(args=args) # ROS2 Python接口初始化
node = StaticTFBroadcaster("static_tf_broadcaster") # 创建ROS2节点对象并进行初始化
rclpy.spin(node) # 循环等待ROS2退出
node.destroy_node() # 销毁节点对象
rclpy.shutdown()
完成代码的编写后需要设置功能包的编译选项,让系统知道Python程序的入口,打开功能包的setup.py文件,加入如下入口点的配置:
entry_points={
'console_scripts': [
'static_tf_broadcaster = learning_tf.static_tf_broadcaster:main',
],
},
两个坐标系的变化是描述清楚了,到了使用的时候,该如何进行查询?通过TF监听
4.TF监听
查询两个坐标系之间的位置关系
运行一个广播器,再运行一个监听器去监听广播
$ ros2 run learning_tf tf_listener
可以看到周期性的显示坐标关系

代码解析
learning_tf/tf_listener.py
import rclpy # ROS2 Python接口库
from rclpy.node import Node # ROS2 节点类
import tf_transformations # TF坐标变换库
from tf2_ros import TransformException # TF左边变换的异常类
from tf2_ros.buffer import Buffer # 存储坐标变换信息的缓冲类
from tf2_ros.transform_listener import TransformListener # 监听坐标变换的监听器类
class TFListener(Node):
def __init__(self, name):
super().__init__(name) # ROS2节点父类初始化
self.declare_parameter('source_frame', 'world') # 创建一个源坐标系名的参数 后面可以通过修改参数将world参数名进行修改,以便修改坐标系的名称,提高代码复用性
self.source_frame = self.get_parameter( # 优先使用外部设置的参数值,否则用默认值
'source_frame').get_parameter_value().string_value
self.declare_parameter('target_frame', 'house') # 创建一个目标坐标系名的参数
self.target_frame = self.get_parameter( # 优先使用外部设置的参数值,否则用默认值
'target_frame').get_parameter_value().string_value
self.tf_buffer = Buffer() # 创建保存坐标变换信息的缓冲区
self.tf_listener = TransformListener(self.tf_buffer, self) # 创建坐标变换的监听器
self.timer = self.create_timer(1.0, self.on_timer) # 创建一个固定周期的定时器,处理坐标信息
def on_timer(self):
try:
now = rclpy.time.Time() # 获取ROS系统的当前时间
trans = self.tf_buffer.lookup_transform( # 监听当前时刻源坐标系到目标坐标系的坐标变换 lookup_transform函数式查看两个坐标系的变换 trans就是坐标变换的数值
self.target_frame,
self.source_frame,
now)
except TransformException as ex: # 如果坐标变换获取失败,进入异常报告
self.get_logger().info(
f'Could not transform {self.target_frame} to {self.source_frame}: {ex}')
return
pos = trans.transform.translation # 获取位置信息
quat = trans.transform.rotation # 获取姿态信息(四元数)
euler = tf_transformations.euler_from_quaternion([quat.x, quat.y, quat.z, quat.w]) # 将四元素变换成欧拉角,方便在日志当中看到直观地信息
self.get_logger().info('Get %s --> %s transform: [%f, %f, %f] [%f, %f, %f]'
% (self.source_frame, self.target_frame, pos.x, pos.y, pos.z, euler[0], euler[1], euler[2]))
def main(args=None):
rclpy.init(args=args) # ROS2 Python接口初始化
node = TFListener("tf_listener") # 创建ROS2节点对象并进行初始化
rclpy.spin(node) # 循环等待ROS2退出
node.destroy_node() # 销毁节点对象
rclpy.shutdown() # 关闭ROS2 Python接口
完成代码的编写后需要设置功能包的编译选项,让系统知道Python程序的入口,打开功能包的setup.py文件,加入如下入口点的配置:
entry_points={
'console_scripts': [
'static_tf_broadcaster = learning_tf.static_tf_broadcaster:main',
'tf_listener = learning_tf.tf_listener:main',
],
},
5.海龟跟随功能解析
还是之前小海龟跟随的示例,自己通过代码进行实现
$ ros2 launch learning_tf turtle_following_demo.launch.py
$ ros2 run turtlesim turtle_teleop_key
原理解析
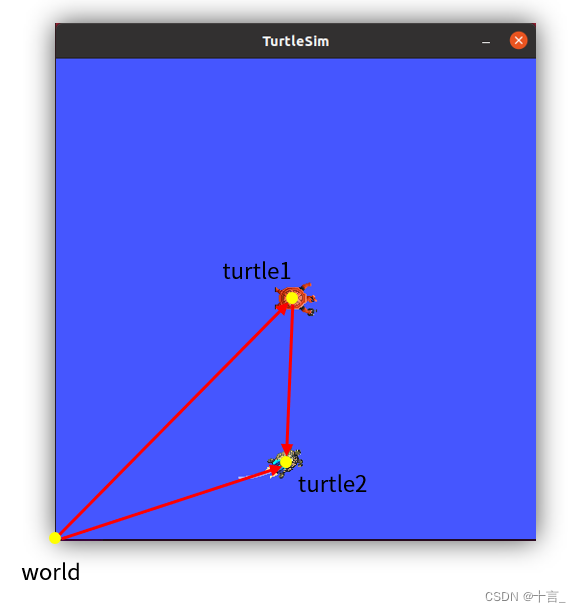
在两只海龟的仿真器中,定义三个坐标系,比如仿真器的全局参考系叫做world,turtle1和turtle2坐标系在两只海龟的中心点,这样,turtle1和world坐标系的相对位置,就可以表示海龟1的位置,海龟2也同理。
要实现海龟2向海龟1运动,我们在两者中间做一个连线,再加一个箭头,我们说坐标变换的描述方法就是向量,所以在这个跟随例程中,用TF就可以很好的解决。
向量的长度表示距离,方向表示角度,有了距离和角度,随便设置一个时间,就可以计算得到速度了,然后就是速度话题的封装和发布,海龟2也就可以动起来了。
所以这个例程的核心就是通过坐标系实现向量的计算,两只海龟还会不断运动,这个向量也得按照某一个周期计算,这就得用上TF的动态广播与监听了。
Launch文件解析
launch文件,里边启动了四个节点,分别是:
- 小海龟仿真器
- 海龟1的坐标系广播
- 海龟2的坐标系广播
- 海龟跟随控制
两个坐标系的广播复用了turtle_tf_broadcaster节点,通过传入的参数名修改维护的坐标系名称
learning_tf/launch/turtle_following_demo.launch.py
from launch import LaunchDescription
from launch.actions import DeclareLaunchArgument
from launch.substitutions import LaunchConfiguration
from launch_ros.actions import Node
def generate_launch_description():
return LaunchDescription([
Node( #小海龟仿真器
package='turtlesim',
executable='turtlesim_node',
name='sim'
),
Node( #海龟1的坐标系广播
package='learning_tf',
executable='turtle_tf_broadcaster',
name='broadcaster1',
parameters=[
{'turtlename': 'turtle1'}
]
),
DeclareLaunchArgument(
'target_frame', default_value='turtle1',
description='Target frame name.'
),
Node( #海龟2的坐标系广播
package='learning_tf',
executable='turtle_tf_broadcaster',
name='broadcaster2',
parameters=[
{'turtlename': 'turtle2'}
]
),
Node( #海龟跟随控制 监听海龟1与海龟2之间的位置关系并转换成速度指令通过话题发布出去,让海龟2跟随海龟1运动
package='learning_tf',
executable='turtle_following',
name='listener',
parameters=[
{'target_frame': LaunchConfiguration('target_frame')}
]
),
])
坐标系动态广播
海龟1和海龟2在world坐标系下的坐标变换,在turtle_tf_broadcaster节点中实现,除了海龟坐标系的名字不同之外,针对两个海龟的功能是一样的。
import rclpy # ROS2 Python接口库
from rclpy.node import Node # ROS2 节点类
from geometry_msgs.msg import TransformStamped # 坐标变换消息
import tf_transformations # TF坐标变换库
from tf2_ros import TransformBroadcaster # TF坐标变换广播器
from turtlesim.msg import Pose # turtlesim小海龟位置消息
class TurtleTFBroadcaster(Node):
def __init__(self, name):
super().__init__(name) # ROS2节点父类初始化
self.declare_parameter('turtlename', 'turtle') # 创建一个海龟名称的参数 通过上面节点的参数不同会更换turtle参数
self.turtlename = self.get_parameter( # 优先使用外部设置的参数值,否则用默认值
'turtlename').get_parameter_value().string_value
self.tf_broadcaster = TransformBroadcaster(self) # 创建一个TF坐标变换的广播对象并初始化
self.subscription = self.create_subscription( # 创建一个订阅者,订阅海龟的位置消息
Pose,
f'/{self.turtlename}/pose', # 使用参数中获取到的海龟名称 订阅仿真器向外发布的每只海龟的位置坐标信息,self.turtlename会被替换成turtle1或者turtle2
self.turtle_pose_callback, 1)
def turtle_pose_callback(self, msg): # 创建一个处理海龟位置消息的回调函数,将位置消息转变成坐标变换
transform = TransformStamped() # 创建一个坐标变换的消息对象
transform.header.stamp = self.get_clock().now().to_msg() # 设置坐标变换消息的时间戳
transform.header.frame_id = 'world' # 设置一个坐标变换的源坐标系
transform.child_frame_id = self.turtlename # 设置一个坐标变换的目标坐标系 self.turtlename会被替换成turtle1或者turtle2
transform.transform.translation.x = msg.x # 设置坐标变换中的X、Y、Z向的平移
transform.transform.translation.y = msg.y
transform.transform.translation.z = 0.0 #平面变换,坐标为0
q = tf_transformations.quaternion_from_euler(0, 0, msg.theta) # 将欧拉角转换为四元数(roll, pitch, yaw)
transform.transform.rotation.x = q[0] # 设置坐标变换中的X、Y、Z向的旋转(四元数)
transform.transform.rotation.y = q[1]
transform.transform.rotation.z = q[2]
transform.transform.rotation.w = q[3]
# Send the transformation
self.tf_broadcaster.sendTransform(transform) # 广播坐标变换,海龟位置变化后,将及时更新坐标变换信息
def main(args=None):
rclpy.init(args=args) # ROS2 Python接口初始化
node = TurtleTFBroadcaster("turtle_tf_broadcaster") # 创建ROS2节点对象并进行初始化
rclpy.spin(node) # 循环等待ROS2退出
node.destroy_node() # 销毁节点对象
rclpy.shutdown() # 关闭ROS2 Python接口
完成代码的编写后需要设置功能包的编译选项,让系统知道Python程序的入口,打开功能包的setup.py文件,加入如下入口点的配置:
entry_points={
'console_scripts': [
'static_tf_broadcaster = learning_tf.static_tf_broadcaster:main',
'turtle_tf_broadcaster = learning_tf.turtle_tf_broadcaster:main',
'tf_listener = learning_tf.tf_listener:main',
],
},
海龟跟随
坐标系都正常广播了,接下来我们就可以订阅两只海龟的位置关系,并且变换成速度指令进行控制啦。
learning_tf/turtle_following.py
import math
import rclpy # ROS2 Python接口库
from rclpy.node import Node # ROS2 节点类
import tf_transformations # TF坐标变换库
from tf2_ros import TransformException # TF左边变换的异常类
from tf2_ros.buffer import Buffer # 存储坐标变换信息的缓冲类
from tf2_ros.transform_listener import TransformListener # 监听坐标变换的监听器类
from geometry_msgs.msg import Twist # ROS2 速度控制消息
from turtlesim.srv import Spawn # 海龟生成的服务接口
class TurtleFollowing(Node):
def __init__(self, name):
super().__init__(name) # ROS2节点父类初始化
self.declare_parameter('source_frame', 'turtle1') # 创建一个源坐标系名的参数
self.source_frame = self.get_parameter( # 优先使用外部设置的参数值,否则用默认值
'source_frame').get_parameter_value().string_value
self.tf_buffer = Buffer() # 创建保存坐标变换信息的缓冲区
self.tf_listener = TransformListener(self.tf_buffer, self) # 创建坐标变换的监听器
#########################请求产生第二只海龟#######################################################
self.spawner = self.create_client(Spawn, 'spawn') # 创建一个请求产生海龟的客户端
self.turtle_spawning_service_ready = False # 是否已经请求海龟生成服务的标志位
self.turtle_spawned = False # 海龟是否产生成功的标志位
###############################################################################################
self.publisher = self.create_publisher(Twist, 'turtle2/cmd_vel', 1) # 创建跟随运动海龟的速度话题
self.timer = self.create_timer(1.0, self.on_timer) # 创建一个固定周期的定时器,控制跟随海龟的运动
def on_timer(self):
from_frame_rel = self.source_frame # 源坐标系
to_frame_rel = 'turtle2' # 目标坐标系
if self.turtle_spawning_service_ready: # 如果已经请求海龟生成服务
if self.turtle_spawned: # 如果跟随海龟已经生成
try:
now = rclpy.time.Time() # 获取ROS系统的当前时间
trans = self.tf_buffer.lookup_transform( # 监听当前时刻源坐标系到目标坐标系的坐标变换
to_frame_rel,
from_frame_rel,
now)
except TransformException as ex: # 如果坐标变换获取失败,进入异常报告
self.get_logger().info(
f'Could not transform {to_frame_rel} to {from_frame_rel}: {ex}')
return
msg = Twist() # 创建速度控制消息
scale_rotation_rate = 1.0 # 根据海龟角度,计算角速度
msg.angular.z = scale_rotation_rate * math.atan2(
trans.transform.translation.y,
trans.transform.translation.x)
scale_forward_speed = 0.5 # 根据海龟距离,计算线速度
msg.linear.x = scale_forward_speed * math.sqrt(
trans.transform.translation.x ** 2 +
trans.transform.translation.y ** 2)
self.publisher.publish(msg) # 发布速度指令,海龟跟随运动
else: # 如果跟随海龟没有生成
if self.result.done(): # 查看海龟是否生成
self.get_logger().info(
f'Successfully spawned {self.result.result().name}')
self.turtle_spawned = True
else: # 依然没有生成跟随海龟
self.get_logger().info('Spawn is not finished')
else: # 如果没有请求海龟生成服务
if self.spawner.service_is_ready(): # 如果海龟生成服务器已经准备就绪
request = Spawn.Request() # 创建一个请求的数据
request.name = 'turtle2' # 设置请求数据的内容,包括海龟名、xy位置、姿态
request.x = float(4)
request.y = float(2)
request.theta = float(0)
self.result = self.spawner.call_async(request) # 发送服务请求
self.turtle_spawning_service_ready = True # 设置标志位,表示已经发送请求
else:
self.get_logger().info('Service is not ready') # 海龟生成服务器还没准备就绪的提示
def main(args=None):
rclpy.init(args=args) # ROS2 Python接口初始化
node = TurtleFollowing("turtle_following") # 创建ROS2节点对象并进行初始化
rclpy.spin(node) # 循环等待ROS2退出
node.destroy_node() # 销毁节点对象
rclpy.shutdown() # 关闭ROS2 Python接口
完成代码的编写后需要设置功能包的编译选项,让系统知道Python程序的入口,打开功能包的setup.py文件,加入如下入口点的配置:
entry_points={
'console_scripts': [
'static_tf_broadcaster = learning_tf.static_tf_broadcaster:main',
'turtle_tf_broadcaster = learning_tf.turtle_tf_broadcaster:main',
'tf_listener = learning_tf.tf_listener:main',
'turtle_following = learning_tf.turtle_following:main',
],
},















 4479
4479











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









