







 本文介绍了网图中最短路径的概念,并详细讲解了迪杰斯特拉(Dijkstra)算法和弗洛伊德(Floyd)算法的工作原理及应用。通过这两个算法,可以逐步求出顶点间的最短路径。Dijkstra算法按路径长度递增产生最短路径,而Floyd算法通过迭代计算所有顶点之间的最短路径。
本文介绍了网图中最短路径的概念,并详细讲解了迪杰斯特拉(Dijkstra)算法和弗洛伊德(Floyd)算法的工作原理及应用。通过这两个算法,可以逐步求出顶点间的最短路径。Dijkstra算法按路径长度递增产生最短路径,而Floyd算法通过迭代计算所有顶点之间的最短路径。
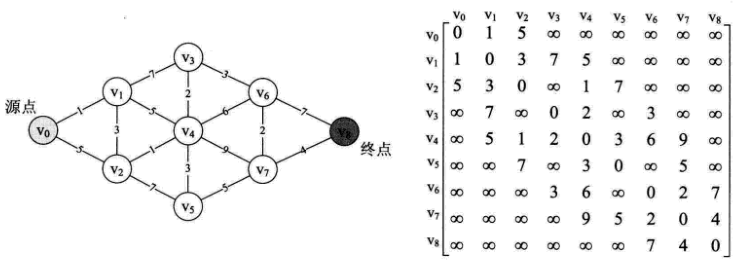
对于网图来说,最短路径,是指两顶点之间经过的边上权值之和最少的路径,并且我们称路径上的第一个顶点是源点,最后一个顶点是终点。
迪杰斯特拉(Dijkstra)算法
这是一个按路径长度递增的次序产生最短路径的算法。它的思路大体是这样的:并不是一下子就求出v0到v8的最短路径,而是一步步求出它们之间顶点的最短路径,过程中都是基于已经求出的最短路径的基础上,求得更远顶点的最短路径,最终得到你要的结果。
#include "stdio.h"
#include "stdlib.h"
#include "io.h"
#include "math.h"
#include "time.h"
#define OK 1
#define ERROR 0
#define TRUE 1
#define FALSE 0
#define MAXEDGE 20
#define MAXVEX 20
#define INFINITY 65535
typedef int Status; /* Status是函数的类型,其值是函数结果状态代码,如OK等 */
typedef struct
{
int vexs[MAXVEX];
int arc[MAXVEX][MAXVEX];
int numVertexes, numEdges;
}MGraph;
typedef int Patharc[MAXVEX]; /* 用于存储最短路径下标的数组 */
typedef int ShortPathTable[MAXVEX];/* 用于存储到各点最短路径的权值和 */
/* 构件图 */
void CreateMGraph(MGraph *G)
{
int i, j;
/* printf("请输入边数和顶点数:"); */
G->numEdges = 16;
G->numVertexes = 9;
for (i = 0; i < G->numVertexes; i++)/* 初始化图 */
{
G->vexs[i] = i;
}
for (i = 0; i < G->numVertexes; i++)/* 初始化图 */
{
for (j = 0; j < G->numVertexes; j++)
{
if (i == j)
G->arc[i][j] = 0;
else
G->arc[i][j] = G->arc[j][i] = INFINITY;
}
}
G->arc[0][1] = 1;
G->arc[0][2] = 5;
G->arc[1][2] = 3;
G->arc[1][3] = 7;
G->arc[1][4] = 5;
G->arc[2][4] = 1;
G->arc[2][5] = 7;
G->arc[3][4] = 2;
G->arc[3][6] = 3;
G->arc[4][5] = 3;
G->arc[4][6] = 6;
G->arc[4][7] = 9;
G->arc[5][7] = 5;
G->arc[6][7] = 2;
G->arc[6][8] = 7;
G->arc[7][8] = 4;
for (i = 0; i < G->numVertexes; i++)
{
for (j = i; j < G->numVertexes; j++)
{
G->arc[j][i]  最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 5928
5928











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









