










一、概述
配电房旋钮开关可以控制设备进入不同的工作模式,通过对旋钮开关位置状态的识别,可以及时了解设备当前的工作模式。常见的旋钮开关如下图所示:

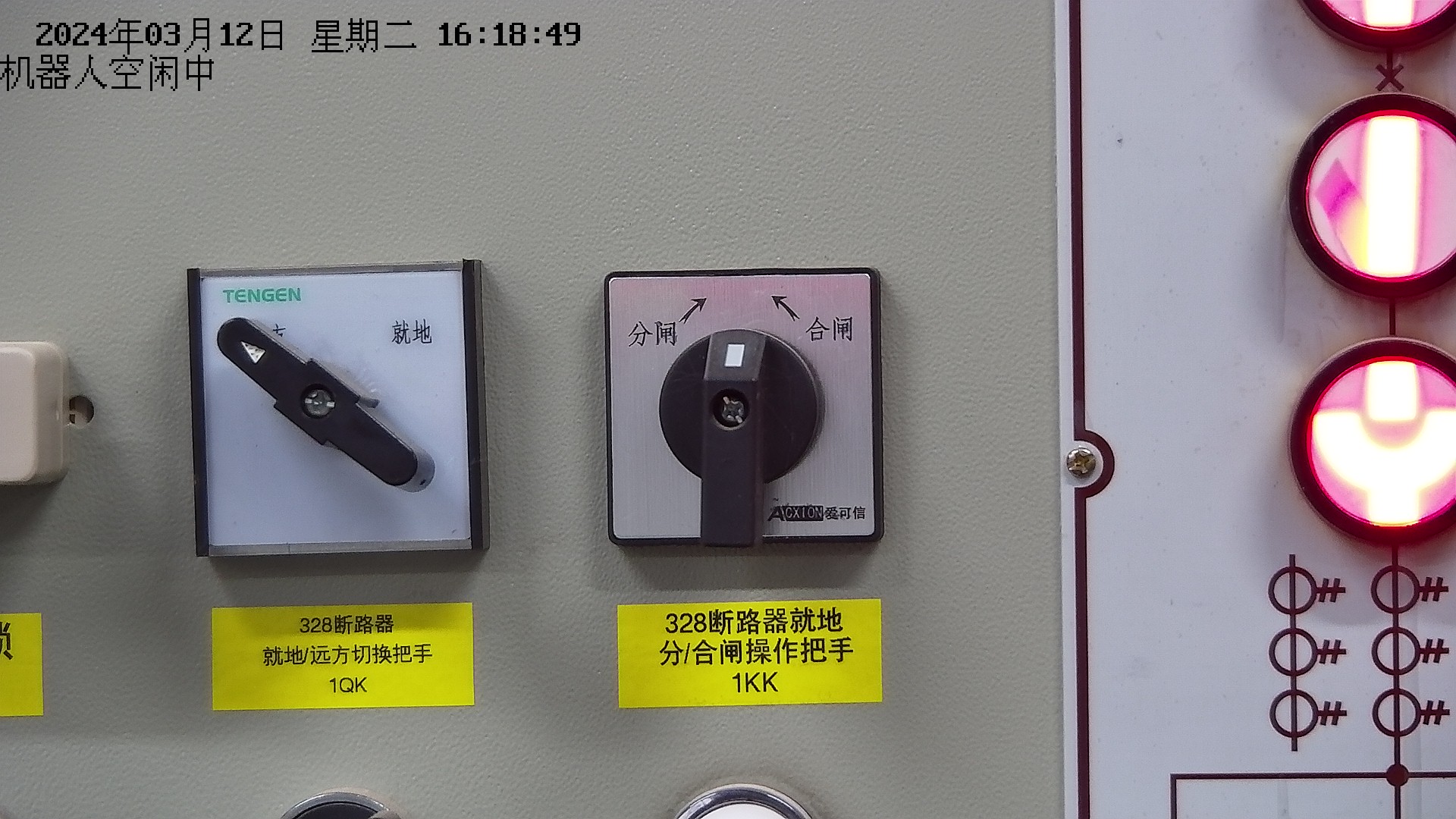
对于旋钮开关位置状态的识别,一般可以分为两个步骤,一个是旋钮开关的检测和定位,即找出旋钮开关在图像中的具体坐标位置,另一个是旋钮开关位置状态的判别,即判断旋钮开关当前处于哪种位置。在具有足够多训练数据的情况下,可以将其当做一个目标检测任务,利用目标检测算法对训练数据进行训练,得到的模型能够直接输出旋钮开关位置的状态。但除了需要大量经过标注的训练图片外,目标检测算法还有个不便之处在于,需要事先列举出所有待识别的旋钮开关类型,并准备好相应的训练图片,一旦新增了待识别的旋钮开关类型,则要重新添加相应的训练图片,并重新训练相应的模型,也就是说,目标检测算法对于已知的旋钮开关有很好的识别效果,但通常无法识别新增的、未知的旋钮开关,泛化扩展能力比较有限。
本文提出一种基于单目深度估计的旋钮开关位置状态识别算法,不仅不需要依赖大量的训练数据,而且能够识别处理多种不同类型的旋钮开关,具有良好的泛化扩展能力。
二、单目深度估计算法Deep-Anything-V2
所谓单目深度估计算法,指通过单个摄像头获取的图像来估计场景中物体的深度信息。Deep-Anything-V2是2024年6月份最新开源的SOTA单目深度估计算法,它使用了大规模的无标注的数据(约6200万张图片)来训练模型,这些数据来自于不同的领域和场景。通过该算法,可以对任意普通的图片进行深度估计,Deep-Anything-V2单目深度估计效果如下:
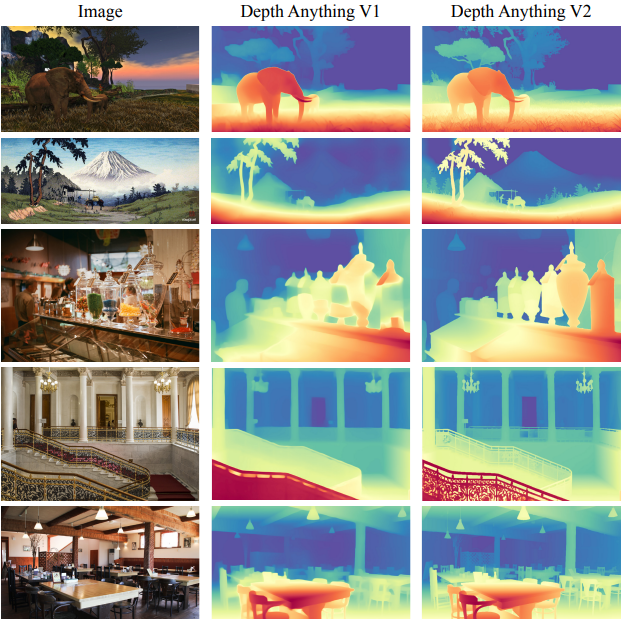
从上图中可以看出,模型能够将图片中不同物体的深度信息用不同的颜色标识出来,具有较好的深度估计效果。
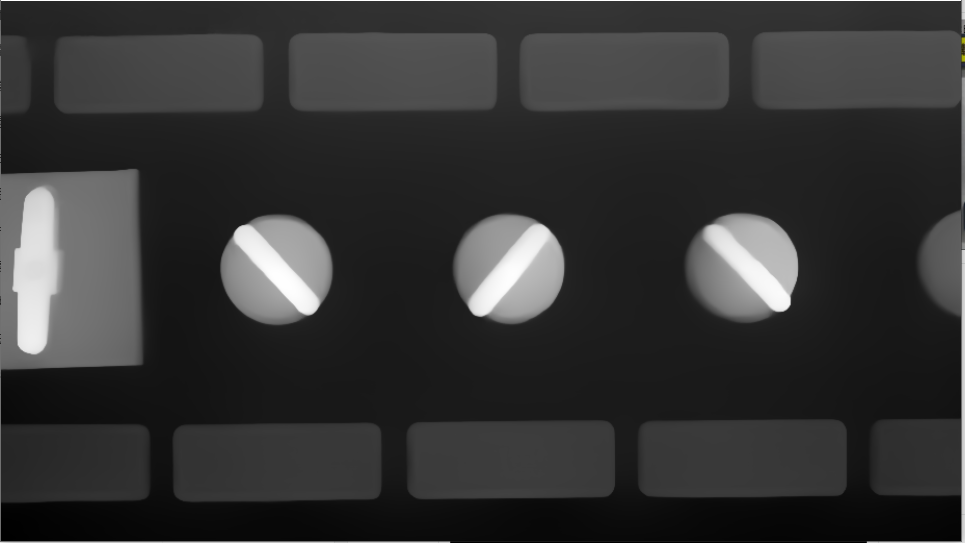
对于旋钮开关来说,其显著的特征在于旋钮部分会明显突出于面板之上,距离摄像头会更近,具有不同的深度信息,因此可以利用深度估计算法对旋转开关图片进行预测,得到相应的深度信息图片,然后对该图片进行相应的图像处理,即可识别出旋钮开关的不同位置状态。
三、基于Deep-Anything-V2的旋钮开关状态识别
利用Deep-Anything-V2识别旋钮开关状态主要过程如下:
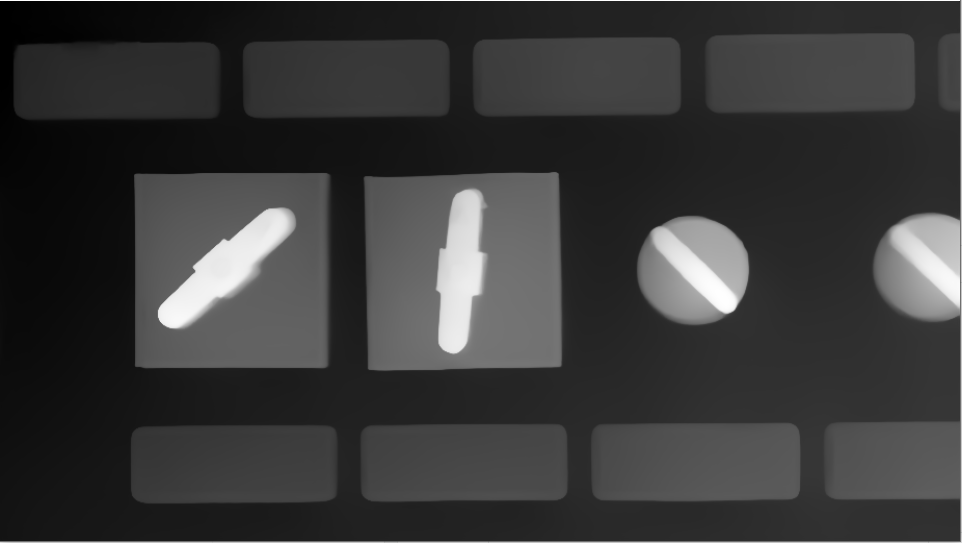
1、将原图输入Deep-Anything-V2模型,推理得到深度估计图,该深度估计图的像素明暗程度表征了不同的深度信息;
2、对深度估计图进行二值化处理,得到二值图,从而可以删除无关背景部分,保留开关前景部分;
3、对二值图进行轮廓检测,并求每个轮廓的最小旋转矩形包围框,该旋转矩形的旋转角度即可作为旋钮开关的旋转角度;
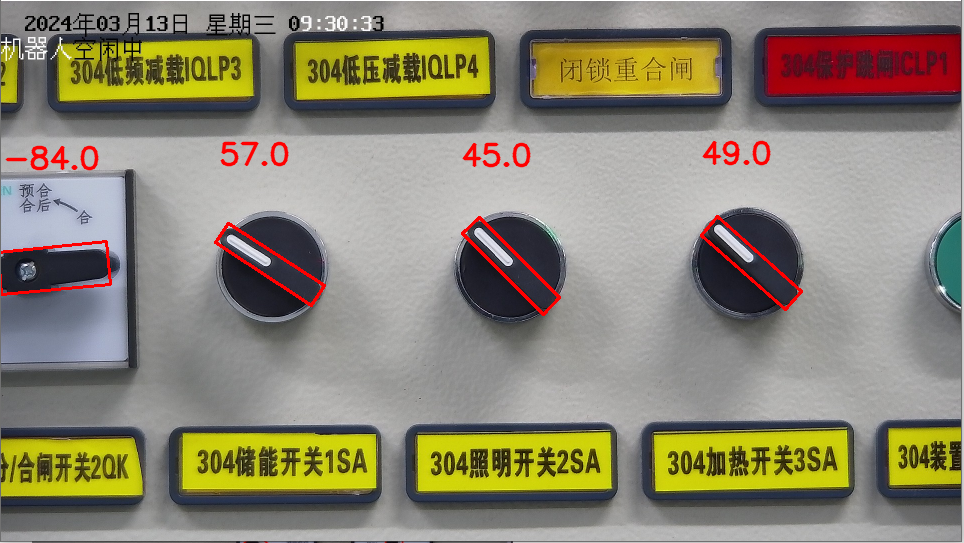
4、将旋转矩形框及旋转角度标示在原图中,得到检测结果图;
5、根据旋转角度进行判断,从而得到旋钮开关的位置状态;
| 例图1 | 例图2 | ||
| 原图 |
|
| |
| 深度估计图 |
|
| |
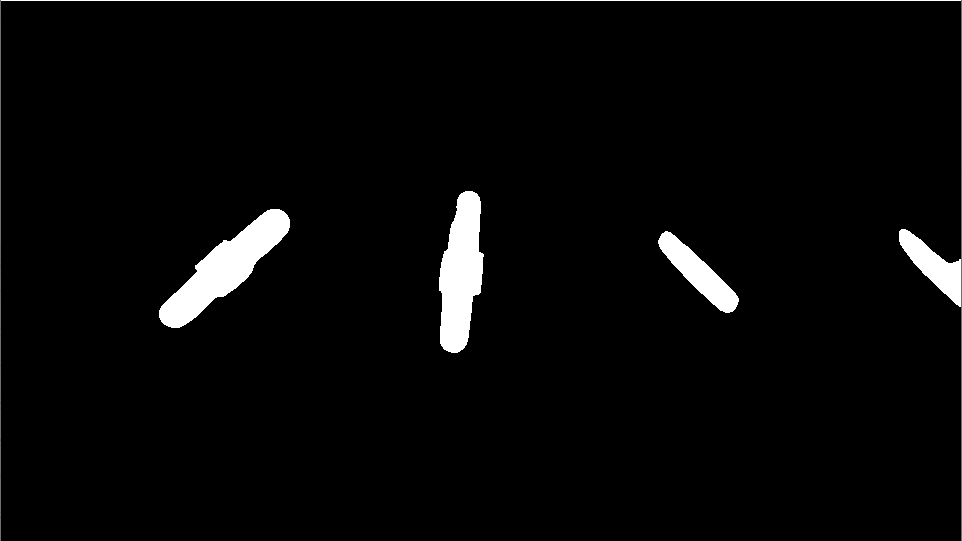
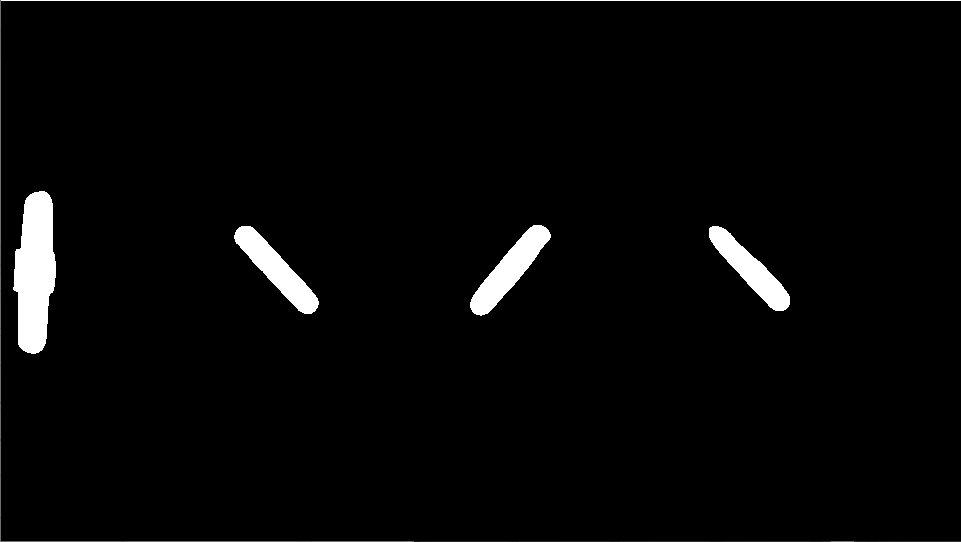
| 二值图 |
|
| |
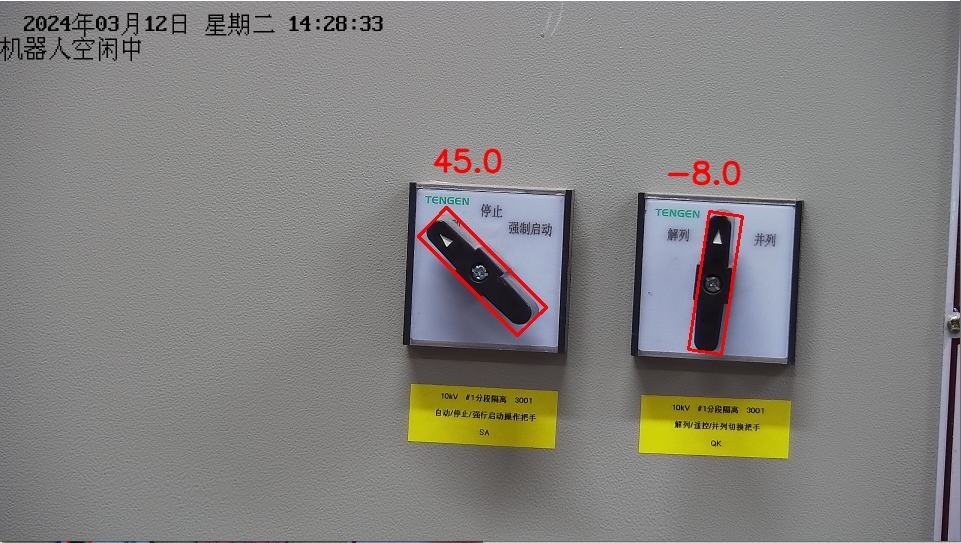
| 检测结果图 |
|
| |


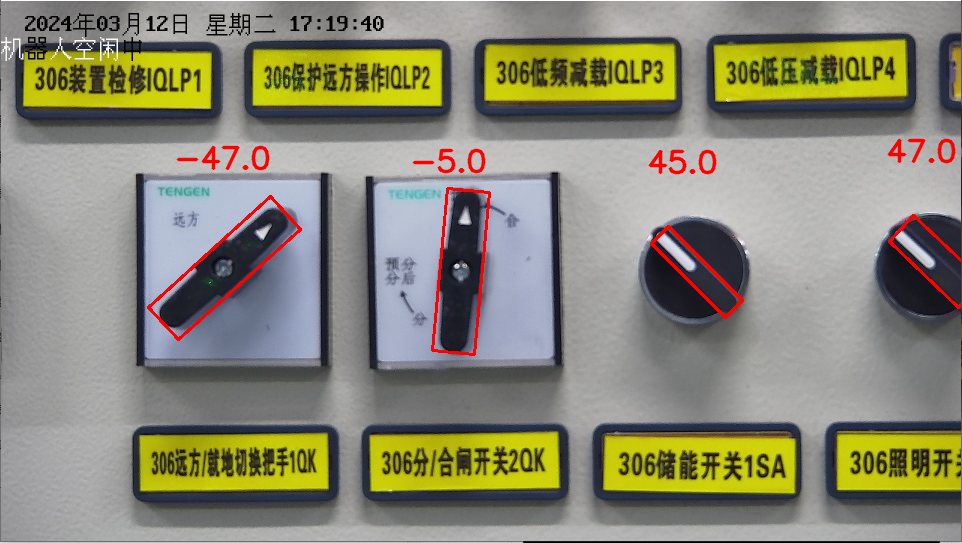

四、旋钮开关状态识别可视化效果


五、小结
本文介绍了一种基于单目深度估计的配电房旋钮开关状态识别方法,考虑到旋钮开关具有明显凸起的特点,将SOTA的单目深度估计算法Deep-Anything-V2应用于旋钮开关状态的识别过程,测试结果显示,算法能够有效输出深度图信息,可以准确识别出各种旋钮开关的旋转角度,具有良好的适应性和泛化性。

















 238
238

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









