







一、开发板平台简介:
1、开发板资源简介
(1)开发板主芯片型号:GD32F303RCT6
(2)开发板主芯片封装:LQFP-64_10x10x05P
(3)开发板主芯片内核:ARM® Cortex®-M4
(4)开发板主芯片主频:120MHz
(5)开发板主芯片Flash大小:256KB
(6)开发板主芯片RAM大小:48KB


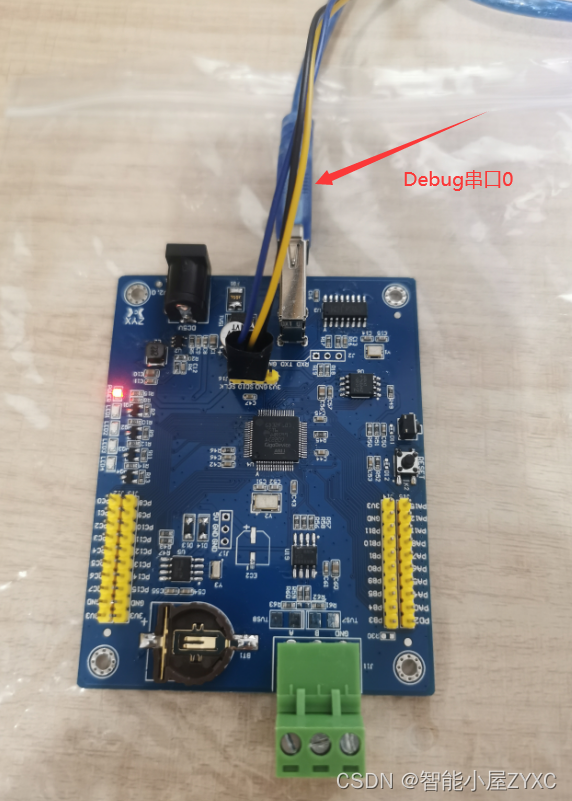
2、Debug调试串口简介
串口全称为串行通讯接口,即数据在通信线上一次传输一位,按先后一定顺序传输。我们通常所说的单片机串口准确来说应该是串行异步收发传输器(Universal Asynchronous Receiver/Transmitter,UART),使用TTL电平,串口需要RXD、TXD、GND三根线进行通信。
(1)我们选用的GD32F303RCT6开发板串口0已通过USB转TLL串口芯片CH340G引出,使用时,只需要用公对公USB线连接电脑即可(注意也得安装CH340G驱动)。
(2)开发板上的其他串口已通过排针引出,为TTL电平,通信的时候需要注意选择对应的电平模块,如USB转TTL串口模块等。
二、快速上手RT-Thread
1、选择合适的BSP
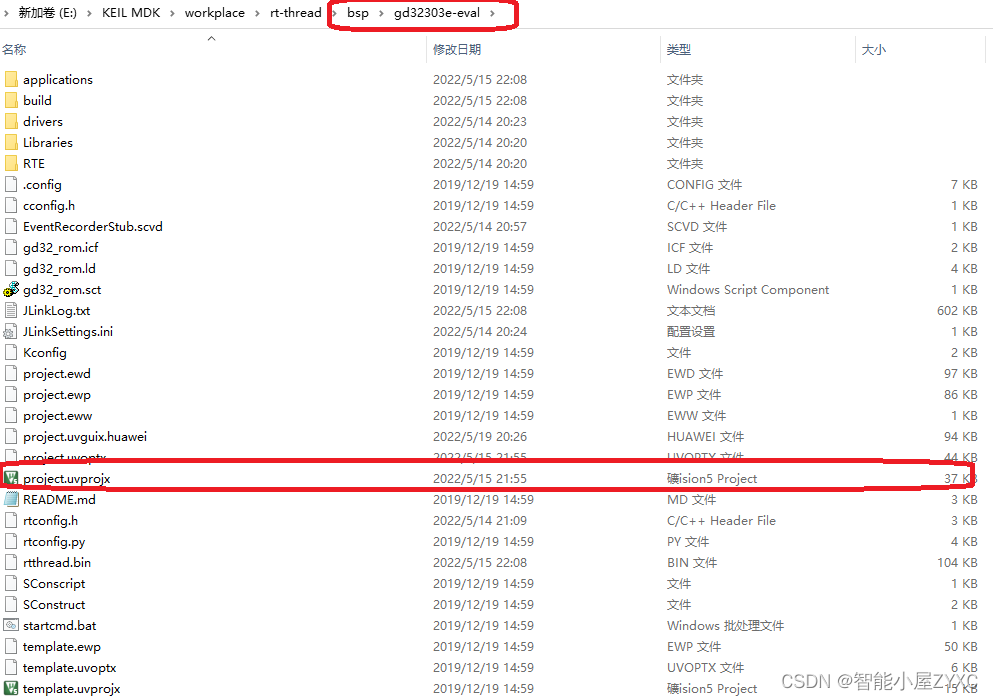
(1)我们这里选择GD32303E-EVAL BSP驱动进行移植。可通过如下参考链接下载bsp:
GD32303E-EVAL![]() https://github.com/RT-Thread/rt-thread/tree/master/bsp/gd32303e-eval
https://github.com/RT-Thread/rt-thread/tree/master/bsp/gd32303e-eval
(2)下载上述bsp后就可以在开发板上进行移植尝试了。
2、移植BSP
已下载的GD32303E-EVEL BSP工程文件,是使用 GD32F303ZET6 作为主控制器的,想要移植到我们的GD32F303RCT6开发板上,需要进行简单的修改,如下:
(1)找到gd32f303-bsp文件,并打开项目。
(2)选择options for target-->选择GD32F303RC芯片。

(3)选择对应的下载器,我这里使用的是jlink ,并选择SWD下载模式。

(4) 设置Flash Download下载模式。

(5)那么接下来重点来了,直接下载的代码在GD32F303RCT6是无法运行的,因为GD32F303ZET6的RAM大小为64K,但是GD32F303RCT6的RAM大小为48K。此处需要在board.h头文件中把RAM大小(GD32_SRAM_SIZE)修改为48,如下所示:
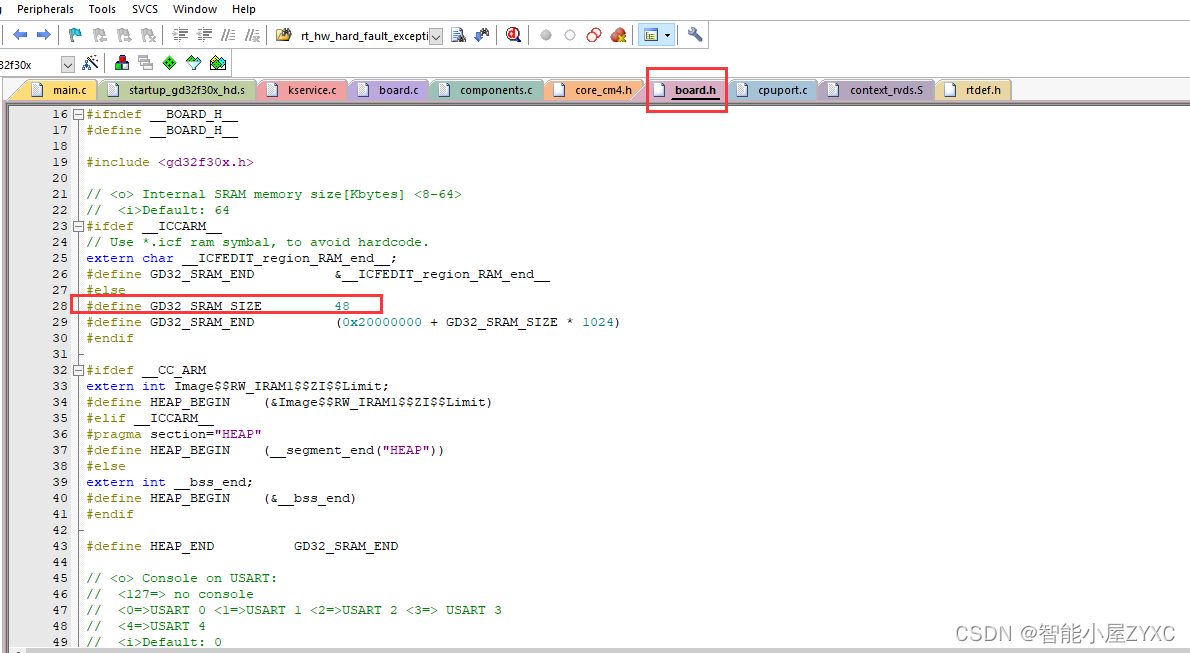
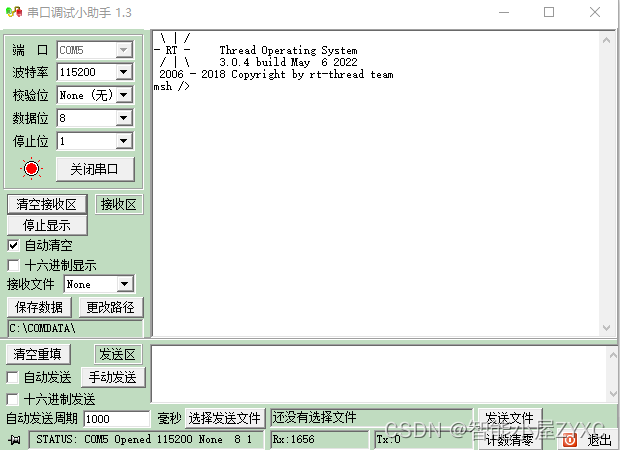
(6)修改后,重新编译下载,即可通过Debug串口看到打印的log信息。
















 2464
2464











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











