






1、背景
新公司有一款TBox的产品,但我对于TBox了解甚少,对车联网也连接甚少。对网络上的一些资料,我也应该做一些整合,加上这段时间在公司接触到的事情,完成这篇博客,写博客也是一种激励自己学习的手段。
1.1 参考资料
https://wenku.baidu.com/view/6b18c04dcec789eb172ded630b1c59eef8c79ad1.html
https://www.ixueshu.com/document/99b122264be0bceecd9167fa7d68dc99318947a18e7f9386.html
2、TBox有什么作用?
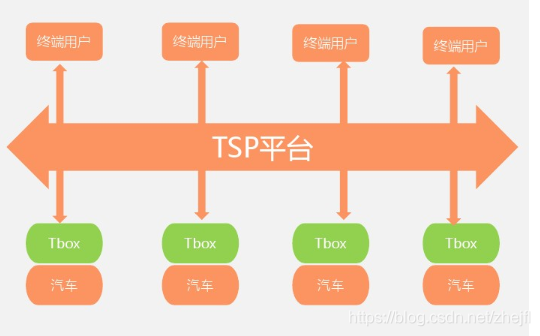
T-Box称为车载智能终端,作为车身唯一可以联网的控制单元,肩负着监控和控制车身状态的使命,其存在的最大价值就在与网络的连接性。TBox主要用于采集车辆相关信息包括位置信息、姿态信息、车辆状态信息(通过连接车上CAN总线)等,然后通过无线通信将信息传送到TSP平台。同时用户可以使用手机APP和Web客户端通过TSP平台下发指令给TBOX终端,对车辆进行控制操作。
TBOX上通云端TSP(Telematics Service Provider, 远程服务提供商),下连汽车CAN总线。
主要包括:
车辆数据采集:通过车身CAN总线、GPS/BM、加速度传感器来完成对车辆状态信息的采集
车辆远程诊断:通过主动查询和被动接收OBD信息,对车辆的状态做一个诊断
车辆远程控制:下发锁车、开关空调、开关车门车窗等
车辆通信网关:作为其他模块上网的通信网关
车辆紧急救援:
车辆防盗追踪:
事故紧急呼叫:
碰撞检测出发报警 :
3、TBOX的硬件架构
通常的TBOX设计架构为MPU+MCU,MPU用来实现应用程序功能,MCU主要用来控制电源管理及接入汽车CAN总线。
当然也有只有MCU的架构。MPU+MCU硬件架构在于既利用了MCU的实时性也利用了MPU上运行稳定的网络协议和文件系统资源。
TBOX主要包括CAN模块、MCU模块、4G模块、GPS模块。
TBOX的主备电源:
主电源指使用汽车蓄电池供电
备用电源指使用TBOX自带电池供电
3.1 TBOX系统各个模式
3.1.1 TBOX ON模式
TBOX ON模式下各个模块均可正常工作;此时可执行ECALL、ICALL、BCALL等功能。
3.1.2 TBOX SLEEP模式
此时MCU处于低功耗模式,CAN模块不工作,GPS模块不工作。4G模块处于在网睡眠状态
3.1.3 TBOX OFF模式
此时只有电池的放电回路电流,所有模块均不工作。
| TBOX ON | TBOX SLEEP | TBOX OFF | |
| TBOX ON | 1、ACC ON 2、远程唤醒 3、ECALL模式开启 | 工作电压大于7v(低于16V) | |
| TBOX SLEEP | 1、ACC OFF CAN网络休眠 2、唤醒结束 3、唤醒超时 4、非ECALL模式下电压小于6.5v | ||
| 主、备电均小于4V |
未完待续















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









