







需求:
测量工件的尺寸
使用Caliper(卡尺)工具
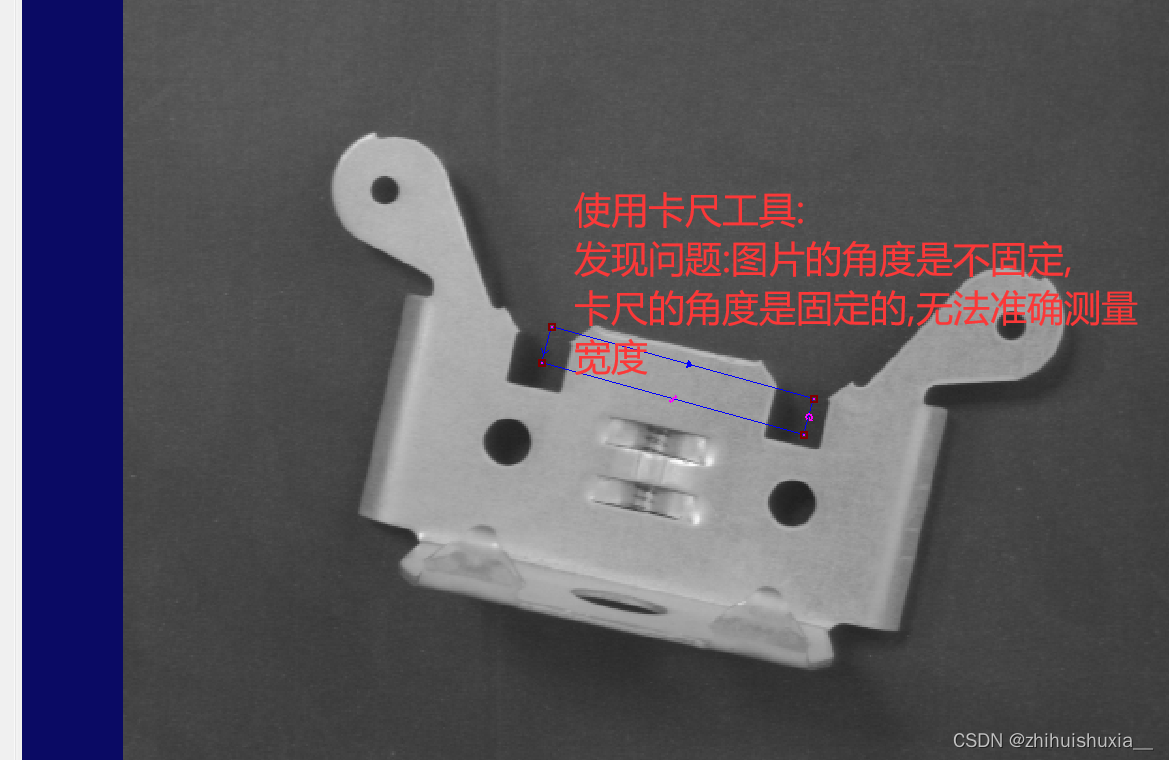
这个时候需要借助Fixture工具
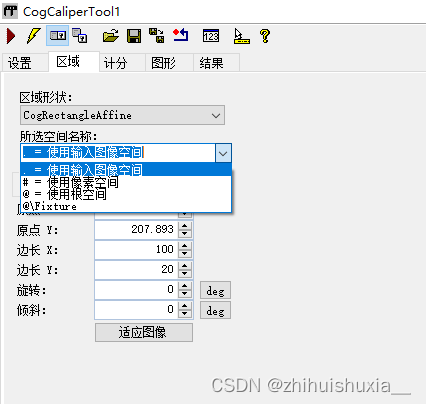
VisionPro中的图像空间
“·” 图像的当前空间,即CogImage中的“SelectedSpaceName”表示的名字空间
“#” 像素空间,即坐标原点为图片左上角的坐标空间,该坐标空间的坐标值仅为整数。
“@” 根空间,默认的坐标空间都是基于根空间。该空间坐标原点为图片左上角,该坐标空间的坐标值类型为浮点型。
“*” 控件的像素空间,主要是显示控件上面使用。
自定义空间 fixture
CogFixtureTool
是一种建立定位坐标系的工具,也是最长用的,在使用此工具建立定位坐标系之前,需要提前获得一个2D转换关系,2D转换关系的通过其他工具获取,其主要任务:
1. 一个往坐标空间树种添加一个定位坐标系,需设定定位坐标系的名称;
2. 建立一个定位后的输出图像提供其他工具调用,输出图像的像素和输入图像完全相同,但坐标空间可以选择为定位空间或者非定位空间。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 928
928

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









