






强化学习:在于环境交互之中进行学习,在智能主体与环境的交互中,学习能最大化受益的行动模式。
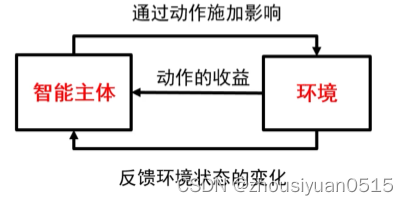
智能主体:
- 按照某种策略,根据当前的状态选择合适的动作;
- 状态指的是智能主体对环境的一种解释;
- 动作反映了智能主体对环境主观能动的影响,动作带来的收益称为奖励;
- 只能主体可能知道也可能不知道环境变化的规律;
环境:
- 系统中智能主体以外的部分;
- 向智能主体反馈状态和奖励;
- 按照一定的规律发生变化;
强化学习特点:
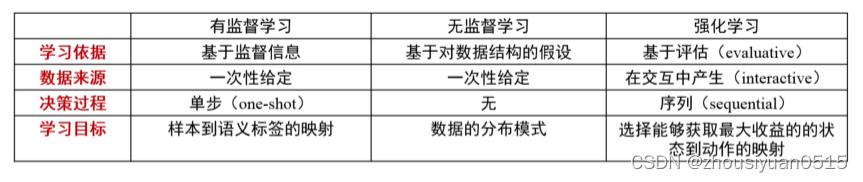
- 基于评估:强化学习利用环境评估当前策略,以此为依据进行优化;
- 交互性:强化学习的数据在环境的交互中产生;
- 序列决策过程:智能主体在与环境的交互中需要作出一系列的决策,这些决策往往是前后关联的;
离散马尔可夫过程:
- 一个随机过程实际上是一列随时间变化的随机变量,其中当时间是离散量时,一个随机过程剋有表示为{Xt}t = 0,1,2,...;
- 马尔科夫链:满足马尔可夫性的离散随机过程,也被称为离散马尔可夫过程;
为了在序列决策中对目标进行优化,在马尔可夫随机过程框架中加入了奖励机制,奖励过程:
- 奖励函数R : S × S → R,其中R(St,St+1)描述了从第t步状态转义导第t + 1步状态所获得奖励;
- 在一个序列决策过程中,不同状态之间的转移产生了一系列的奖励;
- 引入奖励机制,这样可以衡量任意序列的优劣,即对序列决策进行评价;
在强化学习问题中,智能主体与环境交互过程中可自主决定所采取的动作,不同动作会对环境产生不同影响,引入动作:
- 定义智能主体能够采取的动作集合为A;
- 由于不同的动作对环境造成的影响不同,因此状态转移概率定义为Pr;
- 奖励可能受动作的影响,因此修改奖励函数;
- 动作集合A可以是有限的,也可以是无限的;
- 状态转移可是确定的,也可以是随机概率性的;
- 确定状态转移相当于发生从St到St+1的转移概率为1;
决策过程:
- 马尔可夫决策过程MDP = {S, A, Pr, R, γ}是刻画强化学习中环境的标准模式;
- 马尔可夫决策过程可用如下序列来表示:
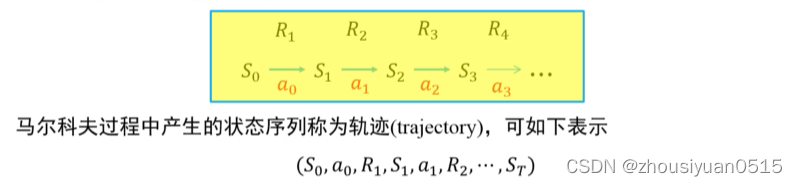
轨迹长度可以是无限的,也可以有终止状态。有终止状态的问题叫做分段的,否则叫做持续的;分段问题中,一个从初始状态到终止状态的完整轨迹称为一个片段。
在机器人移动问题中:状态、行为、衰退系数、起始/终止状态、反馈、状态转移概率矩阵。
策略学习:一个好的策略是在当前状态下采取一个行动,该行动能够在未来收到最大化的反馈
- 价值函数:在第t步状态为s是,按照策略Π行动后未来所获得反馈值的期望;
- 动作-价值函数:在第t步状态为s时,按照策略Π采取动作a后,在未来所获得反馈值的期望;
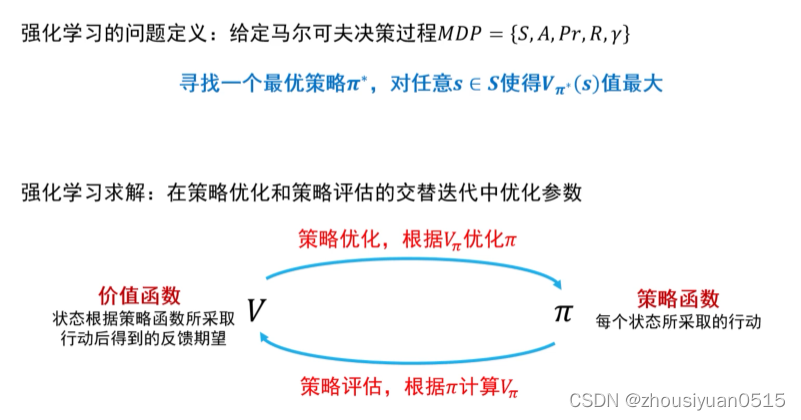
策略优化与策略评估
强化学习的问题与求解
基于价值的求解方法
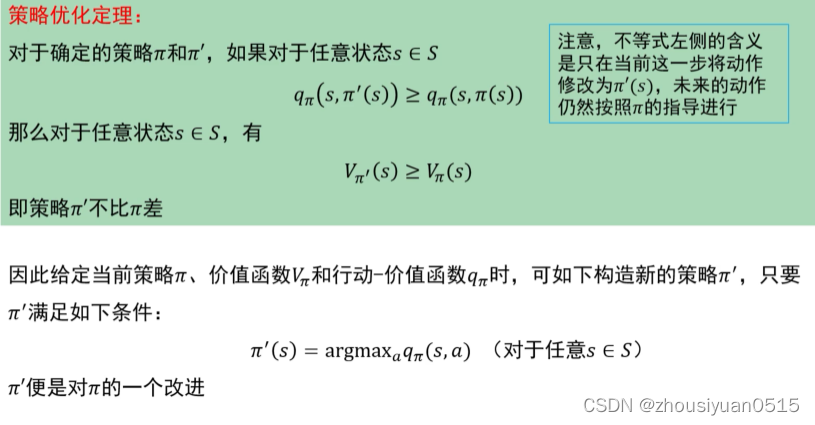
策略优化:
策略评估:
通过迭代计算贝尔曼方程进行评估:
- 动态规划;
- 蒙特卡洛采样;
- 时序差分
动态规划的缺点:
- 智能主体需要事先知道状态转移概率;
- 无法处理状态集合大小无限的情况;
蒙特卡洛采样法的优点:
- 智能主体不必知道状态转移概率;
- 容易扩展到无限状态集合的问题中;
缺点:
- 状态集合比较大时,一个状态在轨迹可能非常稀疏,不利于估计期望;
- 在实际问题中,最终反馈需要在终止状态才能知晓,导致反馈周期较长;
强化学习求解
基于价值的求解方法
策略优化与策略评估结合:
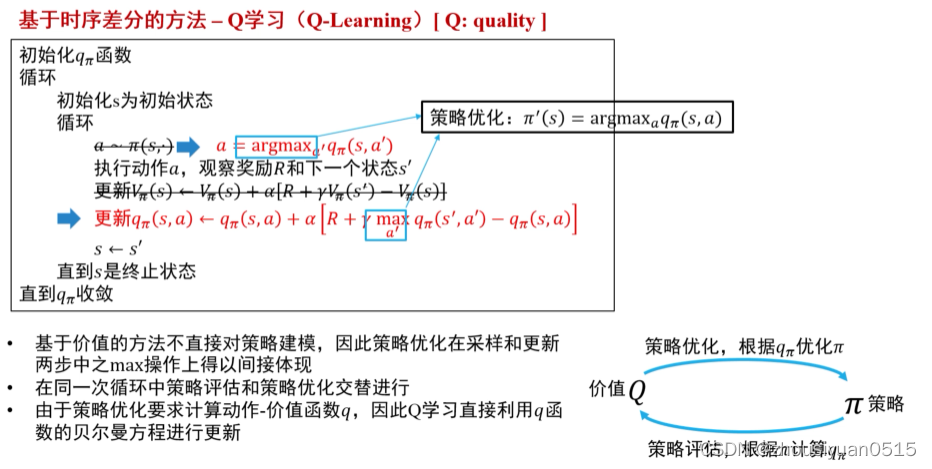
Q学习中只有利用没有探索,所以收敛到非最优策略。
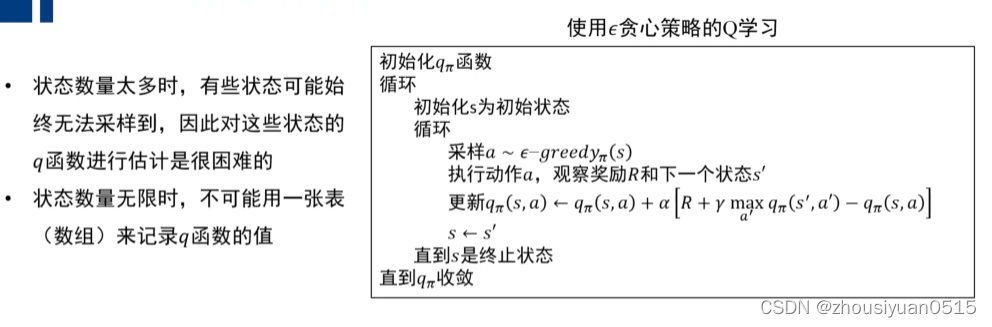
思路:
- 将q函数参数化,用一个非线性回归模型来拟合q函数;
- 用有限的参数刻画无限的状态;
- 由于回归函数的连续性,没有探索过的状态也可通过周围的状态来估计;
深度强化学习
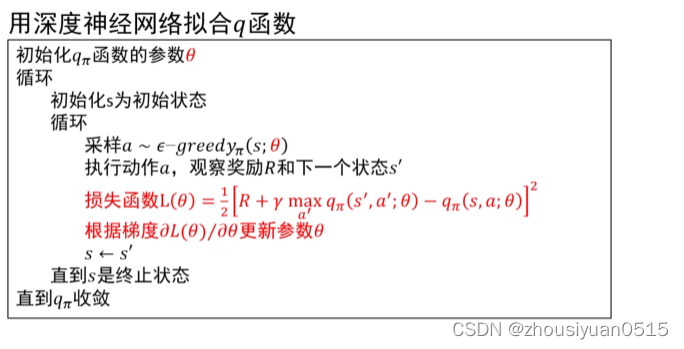
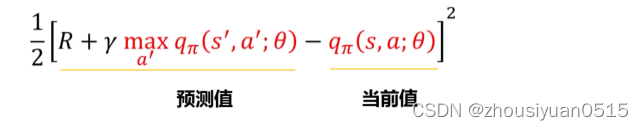
- 损失函数刻画了q的估计值与当前值的平方误差;
- 利用梯度下降法优化参数θ;
- 如果用深度神经网络来拟合q函数,则算法称为深度Q学习;
深度Q学习的两个不稳定因素;
- 相邻的样本来自同一条轨迹,样本之间相关性太强,集中优化相关性强的样本可能导致神经网络在其他样本上效果下降;
- 在损失函数中,q函数的值既用来估计目标值,又用来计算当前值。现在这两处的q函数通过θ有所关联,可能导致优化时不稳定;

经验重现:
- 相邻的样本来自同一条轨迹,样本之间相关性太强,集中优化相关性强的样本可能导致神经网络在其他样本上效果下降。
- 将过去的经验存储下来,每次将新的样本加入到存储中去,并从存储中采样一批样本进行优化:解决了样本相关性强的问题,重用经验,提高了信息利用的效率。
目标网络在损失函数中,q函数的值既用来估计目标值,又用来计算当前值。两处q通过参数θ关联,可能导致优化时不稳定。
损失函数的两个q函数用不同的参数计算:
- 用于计算估计值的q使用参数θ-计算,这个网络叫做目标网络;
- 用于计算当前值的q使用参数θ计算;
- 保持θ-的值相对稳定,更新多次后才同步两者的值;















 7421
7421

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









