







 本文详细解析了IR2104半桥驱动芯片的工作原理,包括引脚定义、内部结构、半桥与全桥驱动机制,以及自举电容与二极管的选型计算。同时,探讨了MOS管发热原因与解决方案,为电路设计者提供了实用的指导。
本文详细解析了IR2104半桥驱动芯片的工作原理,包括引脚定义、内部结构、半桥与全桥驱动机制,以及自举电容与二极管的选型计算。同时,探讨了MOS管发热原因与解决方案,为电路设计者提供了实用的指导。
目录
一、IR2104的引脚定义:
 芯片引脚意义(DataSheet)
芯片引脚意义(DataSheet)
SD信号为使能信号,高电平有效,芯片工作。
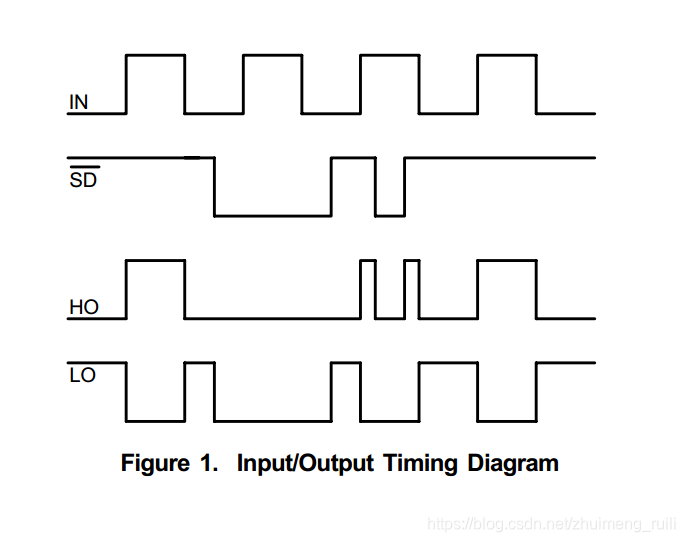
IN为高电平时HO为高,LO为低;IN为低电平时,HO为低,LO为高电平。我们的PWM信号就是在这里输入(因为片内自带了CMOS和LSTTL电平兼容器,可以直接输入而不用考虑电平转换)。
Vb是高侧浮动电源输入脚,HO是高侧门极驱动输出,Vs是高侧浮动电源回流。这三个控制上半桥的MOS导通。
Vcc是低侧浮动及参考电源输入脚,LO是低侧门极驱动输出,COM是低侧回流。这三个控制下半桥的MOS导通。
二、IR2104的内部原理:
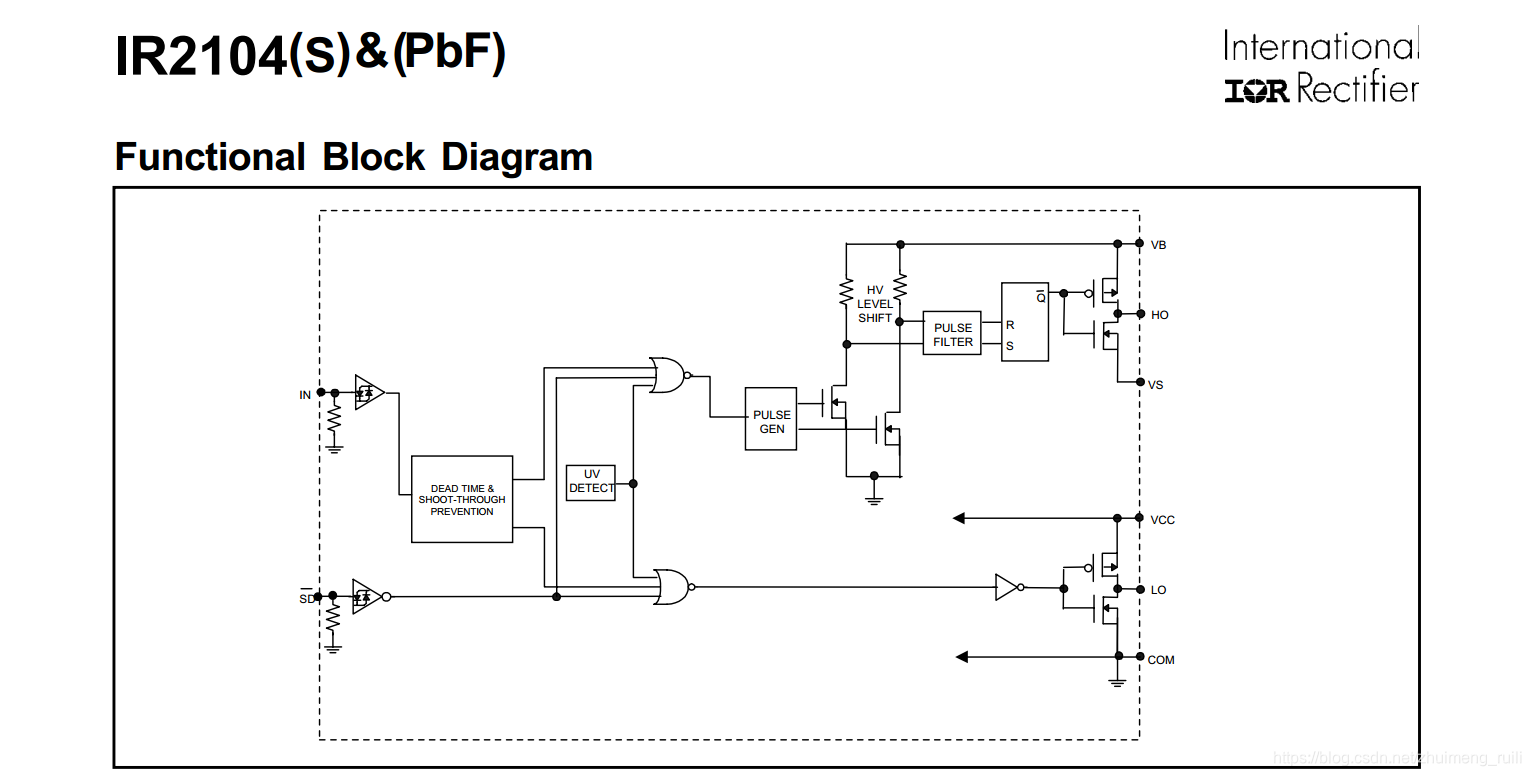
这个驱动设计单从信号逻辑上分析比较容易理解,但要深入的理解和更好的应用,就需要对电路做较深入的分析,对一些外围元件的参数确定做理论分析计算。现在对内部结构进行简单的分析:
芯片被选中后,输入的信号经过死区/击穿保护电路后分两路分别送入上下两组CMOS电路。下路是“0”控制导通,直接送入信号;上路是“1”导通,先通过高脉冲电流缓冲级(high pulse current buffer stage)控制完成信号缓冲以及电平的转换(个人理解,因为上半桥电压来受外部电源影响,需要转换),再送入信号。
初始写0时:下路CMOS上管导通,LO由浮空抬压至芯片电源电位,因此LO和COM之间产生导通电压VCC,下半桥MOS导通;上路CMOS下管导通,HO和Vs短路,上半桥MOS关断。
当写1时,上路CMOS上管导通,依靠电容自举,HO和Vs间产生导通电压VCC,上半桥MOS导通;下路CMOS下路导通,LO和COM短路,下班桥MOS关断。
所以可见,IR2104电源电压必须大于选择的MOS或者IGBT管的导通电压,比如我们智能车电路里2104用的12V就大于LR7843的导通4.5V。
所以,作为控制MOS导通的门极驱动器,它最大也只过200多MA的电流,就给20mil足以。
三、半桥驱动原理分析
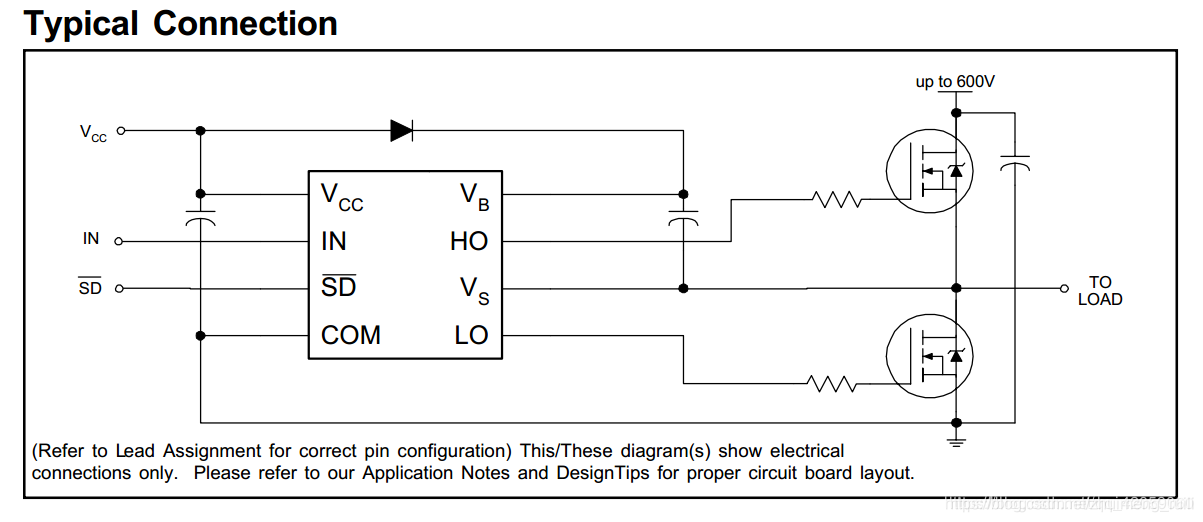
IR2104可以控制半桥的核心在于其Vb和Vs脚之间外接的“自举电容”。那么何谓自举呢?以典型电路为例:
此半桥电路的上下桥臂功率管是交替导通的。每当下桥臂开通,上桥臂Q1关断时Vs脚的电位为下桥臂Q2的饱和导通压降,基本上接近地电位。此时Vcc通过自举二极管对VB和VS间的自举电容C1充电使其接近Vcc电压。
当Q2关断时,基于内部的CMOS结构(具体见下面内部图),HO和Vs之间断开,HO和Vb之间导通。同时,Vs端的电压会升高,由于C1电压不能突变为Vcc,Vcc与Vb间又有自举二极管,因此Vb点的电位接近于Vs点电位和C1上电压之和。所以此时Vb(HO)和Vs之间的压差就为Vcc电压,利用这个压差就可以打开上桥臂。
总结一下:当Q1开通时,自举电容C1作为一个浮动的电压源驱动Q1(上桥臂MOS),导通上桥臂;而Q2开通后,Q1关断,Vs处的浮动电源消失,C1在开通期间损失的电荷在又会得到补充。如此循环,即可控制Q1和Q2进行半桥驱动。这种自举供电方式就是利用Vs端的电平在高低电平之间不停地摆动来实现的,由于自举电路无需浮动电源,因此是最便宜的。
因为自举电容器上的电压基于高端输出晶体管源极电压上下浮动,所以图中的D(自举二极管)和C1(自举电容)是IR2104在脉宽调制(PWM)应用时最需要严格挑选和设计的元器件。只有根据一定的规则进行计算分析,并在电路实验时进行调整,才能使电路工作处于最佳状态。
D是一个重要的自举器件,应能阻断直流干线上的反向高压,其承受的电流是栅极电荷与开关频率之积。同时为了减少电荷损失,应选择反向漏电流小的快恢复或者肖特基二极管。
芯片内高压部分的供电都来自图中自举电容C1上的电荷,所以为了保证高压部分电路有足够的能量供给,应适当选取C1的大小。
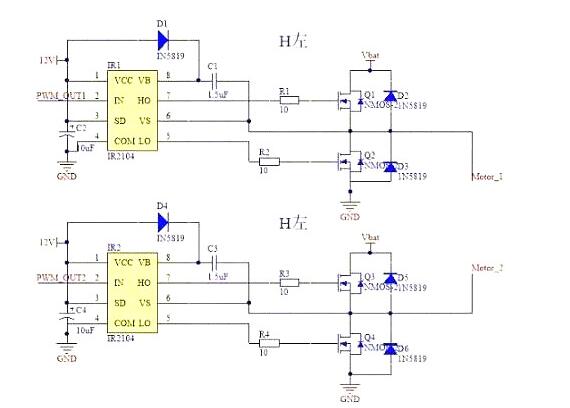
驱动原理图
四、全桥驱动原理分析
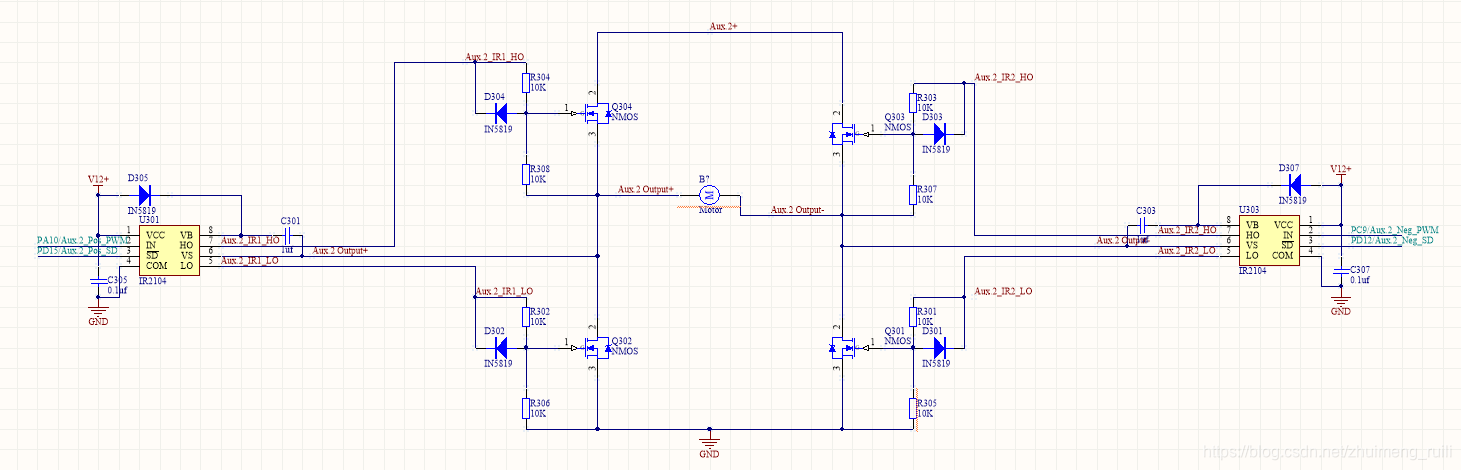
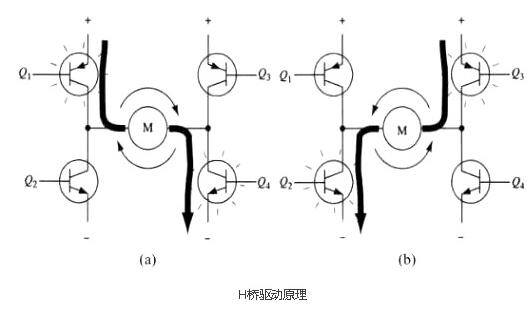
H桥是一个典型的直流电机控制电路,因为它的电路形状酷似字母H,故得名与“H桥”。4个mos管组成H的4条垂直腿,而电机就是H中的横杠。
1)电机驱动
电路首先,单片机能够输出直流信号,但是它的驱动才能也是有限的,所以单片机普通做驱动信号,驱动大的功率管如Mos管,来产生大电流从而驱动电机,且占空比大小能够经过驱动芯片控制加在电机上的均匀电压到达转速调理的目的。电机驱动主要采用N沟道MOSFET构建H桥驱动电路,H 桥是一个典型的直流电机控制电路,由于它的电路外形酷似字母 H,故得名曰“H 桥”。4个开关组成H的4条垂直腿,而电机就是H中的横杠。要使电机运转,必需使对角线上的一对开关导通,经过不同的电流方向来控制电机正反转,其连通电路如图所示。
2)H桥驱动原理
实践驱动电路中通常要用硬件电路便当地控制开关,电机驱动板主要采用两种驱动芯片,一种是全桥驱动HIP4082,一种是半桥驱动IR2104,半桥电路是两个MOS管组成的振荡,全桥电路是四个MOS管组成的振荡。其中,IR2104型半桥驱动芯片能够驱动高端和低端两个N沟道MOSFET,能提供较大的栅极驱动电流,并具有硬件死区、硬件防同臂导通等功用。运用两片IR2104型半桥驱动芯片能够组成完好的直流电机H桥式驱动电路,而且IR2104价钱低廉,功用完善,输出功率相对HIP4082较低,此计划采用较多。
另外,由于驱动电路可能会产生较大的回灌电流,为避免对单片机产生影响,最好用隔离芯片隔离,隔离芯片选取有很多方式,如2801等,这些芯片常做控制总线驱动器,作用是进步驱动才能,满足一定条件后,输出与输入相同,可停止数据单向传输,即单片机信号能够到驱动芯片,反过来不行。
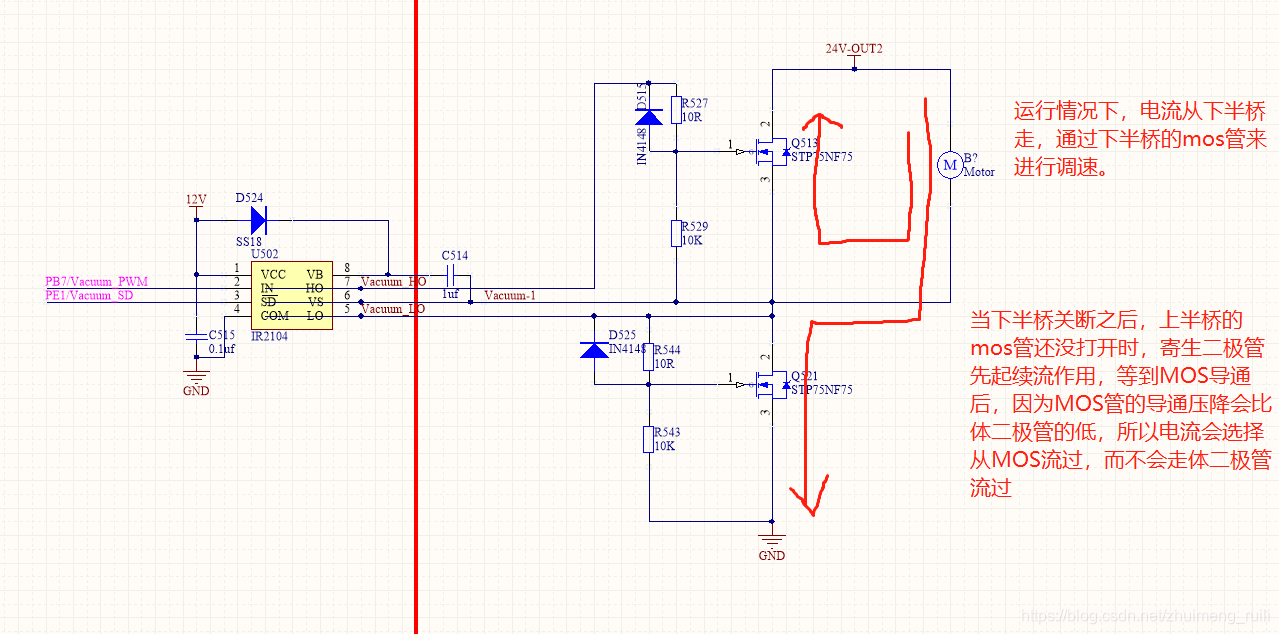
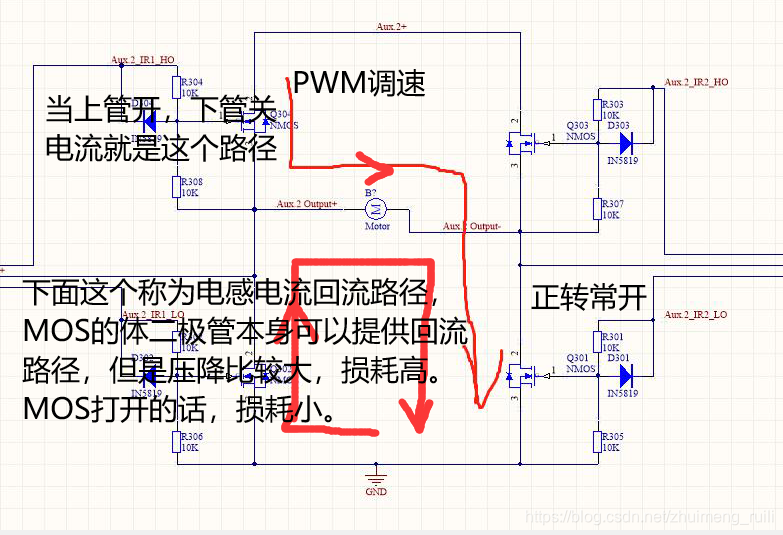
五、电感电流回流路径的建立
在电机在关闭之后,电机作为感性负载会产生反电动势,这个时候如果让h桥的两个下桥都导通,就会产生一个回路,将反电动势消耗掉
六、自举电容容值的计算与自举二极管选型:
自举二极管D必须使用与功率开关管相同耐压等级的快恢复二极管;
自举电容设计也至关重要,C1的耐压比功率器件充分导通时所需的驱动电压(典型值为10 V)高。若在C1的充电路径上有1.5 V的压降,且假定有一半的栅压因泄露而降低,则自举电容C1可按式(4)来选取:

式中:Qg为MOSFET的门极电荷。
工程应用上一般取C1>2*Qg/(VCC-10-1.5),且应选取容量稳定,耐脉冲电流的无感电容。
七:mos管发热可能的问题
1、电源振铃引起发热
之前设计的有刷直流电机驱动电路,采用的是IR2104半桥驱动器去驱动H桥功率电路,电路使用的都是经典的芯片厂商提供的设计方案,可是出现了一个糟糕的问题,电路就算不带载,功率管也发烫的厉害,要是带载则夸张的发热,能达到100℃以上,太恐怖了。为了这个问题,排查了整整一天多时间,百思不得其解,最后通过各个点的波形测试,发现问题出在电源受到功率管开关的影响,产生了极大的波动,导致电源产生振铃现象,峰值电压超过电源电压的3倍。从而导致了功率管DS,GS间的电压时常超过耐压值,和影响了IR2104S的驱动波形,导致上下臂直通现象的出现。
解决方法:在功率电路H桥电源处加一个合适的滤波电容,一般10uF以上,去除电源干扰问题,从而彻底解决驱动电路问题。注意选择的不同的MOS管,需要的滤波电容容值也会相应的改变,必须做出调整。
2、死区时间异常引起发热
IR2104死区时间异常,引起mos管空载发热 https://blog.csdn.net/zhuimeng_ruili/article/details/110354269
八: 推荐阅读
MOS管防护电路实测:https://blog.csdn.net/zhuimeng_ruili/article/details/108979413
IR2104死区时间异常,引起mos管空载发热 https://blog.csdn.net/zhuimeng_ruili/article/details/110354269
吐槽一小下:
调试mos管真的是一个又费时间又费钱的活啊,慢慢的磨掉你的耐心,啊。。。。下图是这个项目中烧掉的mos,还只是其中的一小半,前面的都没有收集,粗略估计目前为止大概烧了三四百颗mos,一颗三块。。。。啊,继续烧板子吧。。。。


















 9827
9827

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









