









 该研究提出了一种动态时空图卷积神经网络(Dynamic GCNN)以适应交通数据中空间依赖关系的变化。通过动态发现拉普拉斯矩阵的变化,结合张量分解,模型能够实时学习并预测交通流量。实验显示,该方法在交通预测任务中提高了25%的准确性,且在面对数据异常时表现出较高的容错性。
该研究提出了一种动态时空图卷积神经网络(Dynamic GCNN)以适应交通数据中空间依赖关系的变化。通过动态发现拉普拉斯矩阵的变化,结合张量分解,模型能够实时学习并预测交通流量。实验显示,该方法在交通预测任务中提高了25%的准确性,且在面对数据异常时表现出较高的容错性。
图卷积神经网络(GCNN)已经成为一个日益活跃的研究领域。通过预定义的基于节点距离的Laplacian矩阵对图中节点的空间依赖关系进行建模。然而,在许多应用场景中,空间依赖关系会随着时间的推移而变化,使用固定的拉普拉斯矩阵无法捕捉这种变化。
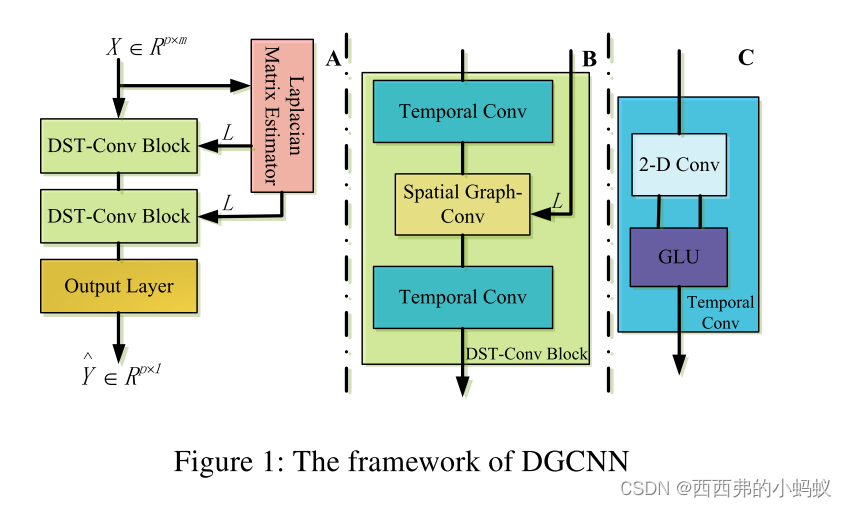
为了跟踪交通数据之间的空间依赖关系,提出了一种动态时空GCNN来进行准确的交通预测。我们的深度学习框架的核心是动态发现拉普拉斯矩阵的变化。拉普拉斯算子矩阵的估计量。为了以较低的复杂度实现实时学习,创造性地将张量分解融入深度学习框架,将实时交通数据分解为稳定且依赖于长期时空交通关系的全局分量和捕捉交通波动的局部分量。本文提出一种新的设计来估计动态
基于以上两个分量的图的拉普拉斯矩阵的理论推导,并介绍了我们的设计依据。利用两个实时交通数据集对预测性能进行了评估。实验结果表明,该网络可以提高25%的准确率。
阅读者总结:这篇论文学习动态的拉普拉斯矩阵值得学习。这篇论文在一些点上的说法值得考虑,比如减去长期交通流量 就剩余短期交通流量,这个说法本身不对。其次张量用来模拟不同时间槽下的交通流量,这类划分时间段的办法也值得怀疑,虽然很多时空数据挖掘中也采用这类方法,但是交通流量的长期或者短期的依赖关系,不同时间粒度的划分,很难模拟依赖关系。
背景:
以往的研究表明,不同时间段的交通流模式存在较大差异。此外,每天都可能发生交通事故,这也会影响路网中路段之间的关系。这些因素会导致邻接矩阵的动态变化,从而导致拉普拉斯矩阵的变化。因此,图的精确拉普拉斯矩阵可能是时变的,通常难以处理。
框架:
Dynamic Laplacian Matrix Estimator
给定一个表示交通网络静态图结构的全局Laplacian矩阵,实时Laplacian矩阵将围绕它上下波动。扰动是图结构发生微小变化的结果,主要由短时交通模式和交通事故引起。因此,只需根据短时流量确定拉普拉斯矩阵的变化量即可。由于长期交通数据的空间和时间相关性,形成一个低秩张量。由于交通动态和异常在时间维度上很少出现,因此短时数据在时间维度上形成一个稀疏张量。
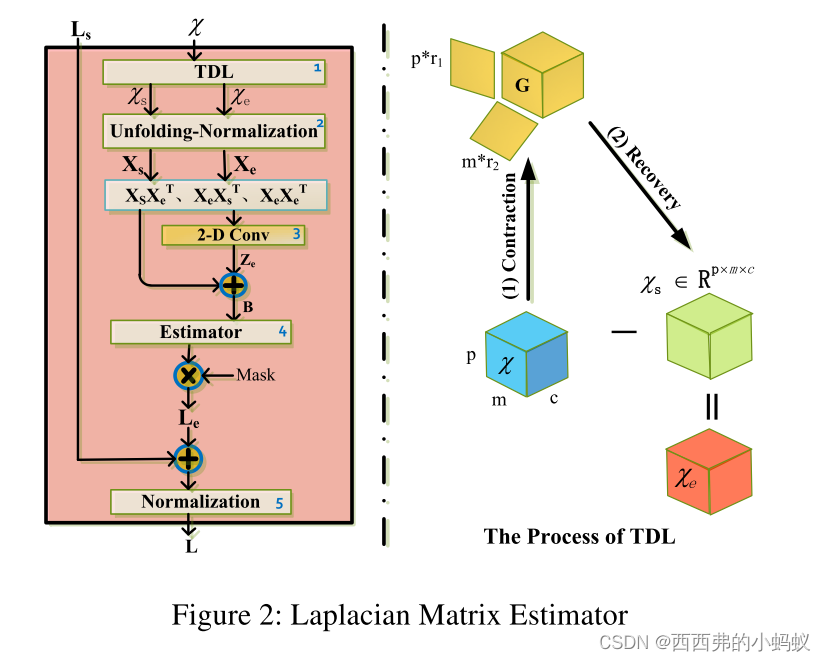
因此,我们将张量操作融入到神经网络中,并将交通张量分解为两个分量,一个是维持长期且高度相关的交通信息的低秩张量,一个是跟踪交通动态变化的稀疏张量。因此,我们的拉普拉斯矩阵估计器包括两个部分,一个张量分解层(TDL)和一个用于动态拉普拉斯矩阵学习的单位。
1)Tensor Decomposition Layer (这部分值得学习)
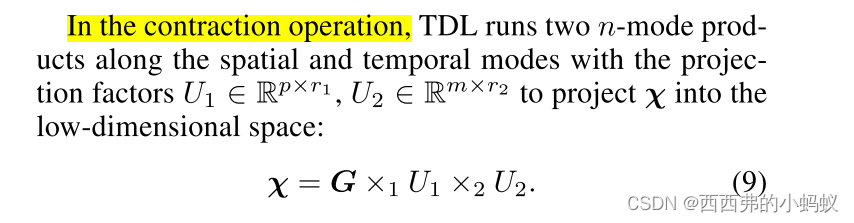
在我们的拉普拉斯矩阵估计器中,我们应用TDL提取交通数据的全局和局部分量,通过收缩和恢复两个操作。
我们展示了一个三阶流量张量χ与(p, m, c),对应于空间域的节点数,时间域要考虑的时隙数和信道状态监测的数量。本文将c设置为1,重点关注交通速度的监测。(r1, r2)对应于空间和时间模式的秩,由于空间和时间域上的流量相关性,通常会低于p和m。
本文将c设为1,重点关注交通速度的监测。(r1, r2)对应的是空间和时间模态的秩,由于空间和时间域上的交通相关性,一般会低于p和m。


2)Learning of Dynamic Laplacian Matrix

对于图2左侧所示的整体动态Laplacian矩阵估计器,输入数据将经过5个子过程:
Experiments
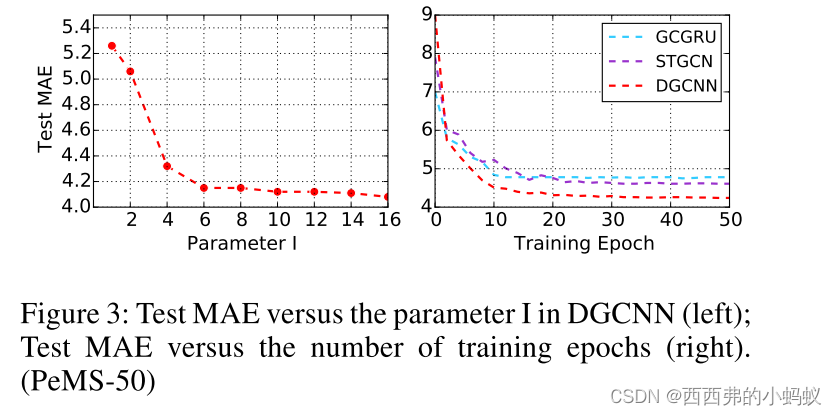
为了在Laplacian矩阵估计器中为Eq.(18)选择合适的参数I,我们在图3的左侧测试I的影响。正如预期的那样,测试MAE随着I的增加而减小,以便更好地估计拉普拉斯矩阵的变化。当参数I大于6时,下降速度趋于缓慢。因此,本文将参数I设置为6。
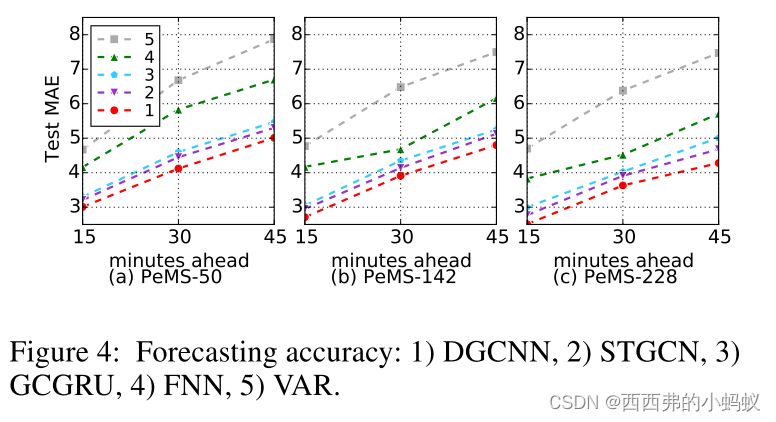
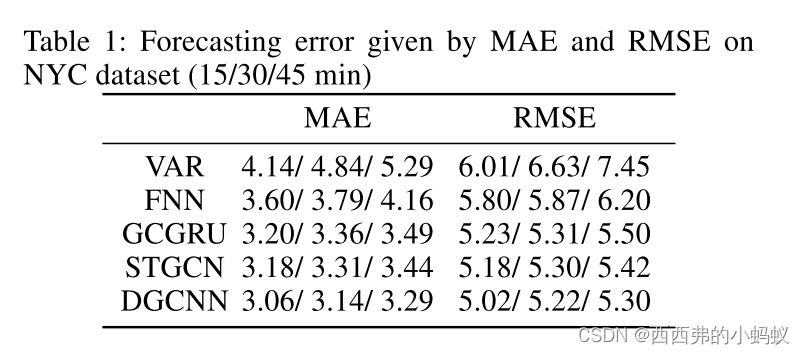
我们运行每个模型10次,并报告平均结果。从表1和图4中可以看出,所提出的DGCNN通过在两个数据集上实现最低的RMSE和MAE来进行流量预测,优于所有竞争基线。
总之,传统的线性预测方法VAR由于无法处理易变的流量数据而表现最差。与其他三种深度学习模型相比,DGCNN的性能也更好,平均精度提高了8% ~ 10%。路网上的交通模式和空间依赖关系是动态变化的。忽略路网空间依赖关系的动态变化,参考方案的预测误差较高。
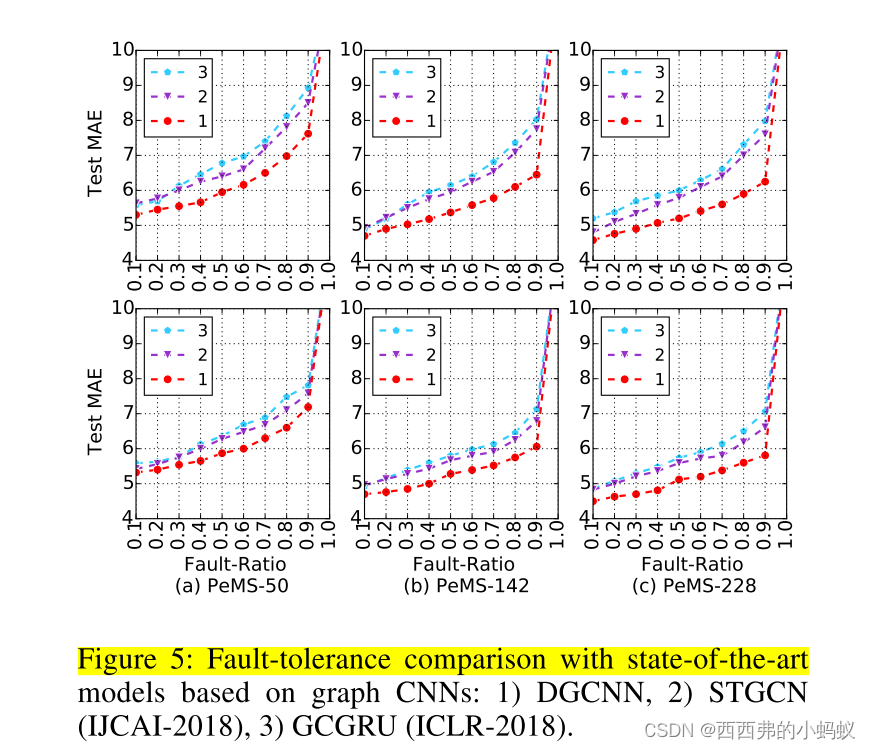 在某些路段,由于传感器故障或交通事故,实时交通样本可能出现局部异常。
在某些路段,由于传感器故障或交通事故,实时交通样本可能出现局部异常。
在图5的最上面一行,所选节点的受损观测值被替换为零均值的高斯白噪声(方差为1.0)。在最底层,零用来替换“损坏”的观测值。
将时空信息与动态拉普拉斯矩阵相融合,与两种最先进的基于图cnn的模型相比,该模型具有更高的容错性,平均精度提高10% ~ 25%。即使在故障率达到0.9时,DGCNN仍具有较强的预测能力。在相同的噪声污染量下,其他模型的性能无一例外地急剧下降。在3个PeMS数据集上的实验结果表明,该模型的性能增益会随着路网规模的增大而增大。DGCNN模型可以检测隐藏在"污染"交通样本中的空间依赖变化,并调整图卷积操作的感受野。图3的右侧是三个模型在参数数量大致相同的情况下的学习曲线。随着训练步数的增加,与GCNN和STGCN相比,DGCNN取得了最低的验证误差,表明了其训练有效性。直观地说,动态Laplacian矩阵估计器使模型具有捕捉路网中各种因素影响的能力和灵活性
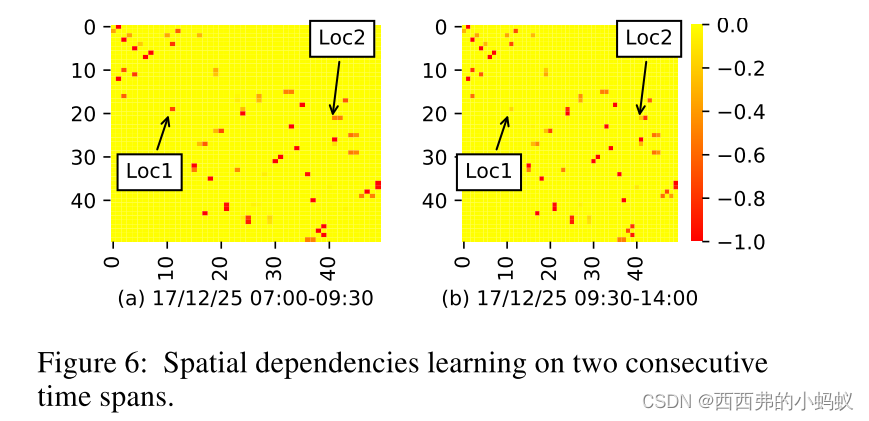
为了确定新模型在学习交通网络空间依赖关系方面的能力,在两个数据集上进行了许多模拟。本文首先测量了输入数据的空间顺序对空间依赖学习的影响,如Cui、Ke和Wang 2018年所做的那样。我们随机地重新安排输入数据的空间维度并重新训练我们的模型。学习到的拉普拉斯矩阵和模型的预测精度没有明显变化,证明了该模型的有效性。测量了一天的不同时间跨度对空间依赖关系学习的影响。如图6所示,学习到的Laplacian矩阵在任意两个连续时间跨度上的热图非常接近,这意味着我们的新模型能够学习Laplacian矩阵的长期结构。标记为" LOC1 "和" LOC2 "的两个位置也表明,该模型可以学习拉普拉斯矩阵的局部变化

















 862
862

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









