






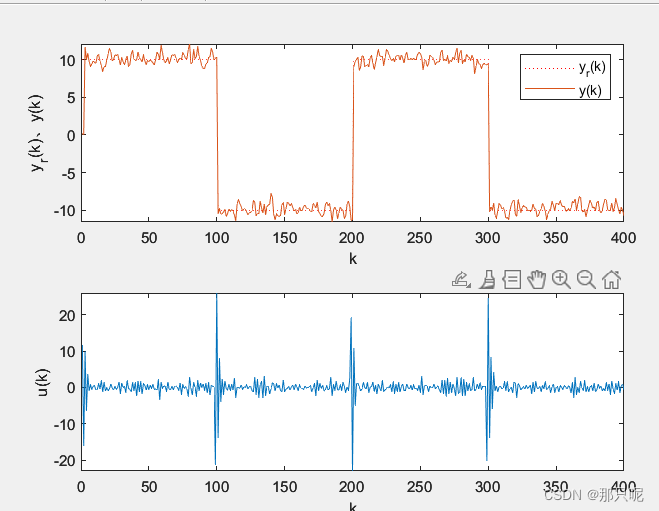
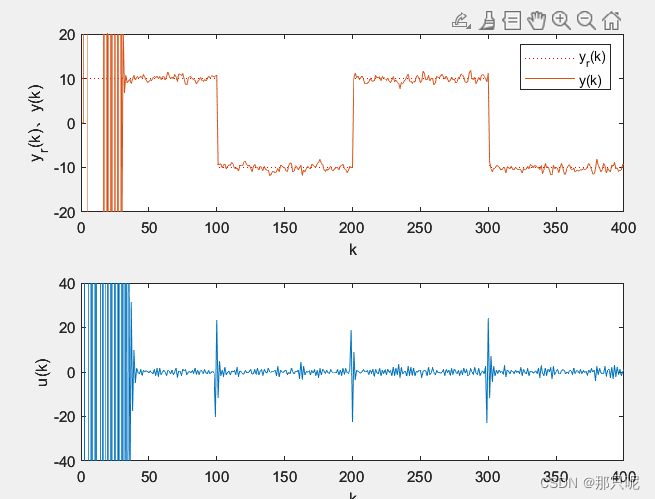
个人整理了[自适应控制] 最小方差控制(MVC)算法理论,并使用 Matlab代码 进行了实现,效果明显,配备了参考文献与书籍,适合新手学习使用。
模型代码获取: [自适应控制] 最小方差控制(MVC)算法理论,及其 Matlab代码 实现



个人整理了[自适应控制] 最小方差控制(MVC)算法理论,并使用 Matlab代码 进行了实现,效果明显,配备了参考文献与书籍,适合新手学习使用。
模型代码获取: [自适应控制] 最小方差控制(MVC)算法理论,及其 Matlab代码 实现
 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言
























