










使用Vector AUTOSAR XML Editor打开,总览图如下
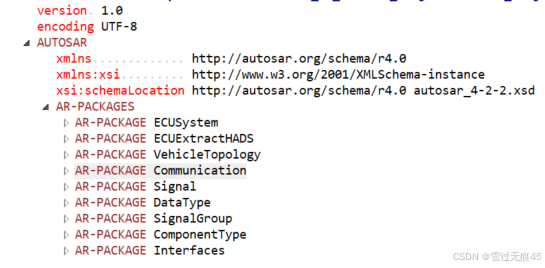
1、ECUSystem中主要描述了controller的采样点范围、每个bit的tq数量、同步跳转宽度范围;接收、发送周期;接收、发送Frame/Pdu/Signal port。
2、ECUExtractHADS中主要描述sifnal mapping、sw mapping信息。
3、VehicleTopolog描述CAN报文波特率,报文类型、报文地址类型、报文ID,Frame、Pdu、Signal之间的映射关系。
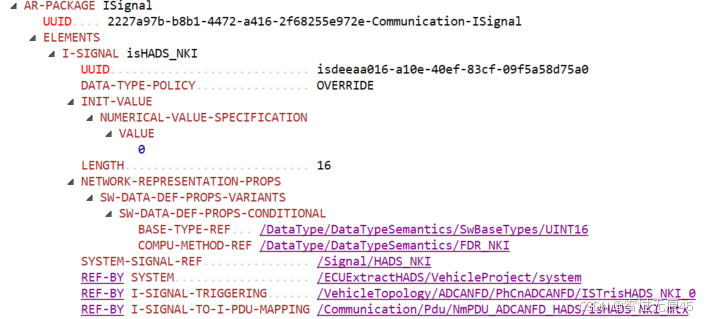
4、Communication描述了Frame、Pdu、PduGroup、Signal、SignalGroup、NmConfig、TpConfig。其中,Frame中包括Length、ByteOrder、关联的PDU、start position等信息;Pdu中包括Length、关联的Signal,Signal的ByteOrder、StartPosition、Transfer Property等信息;
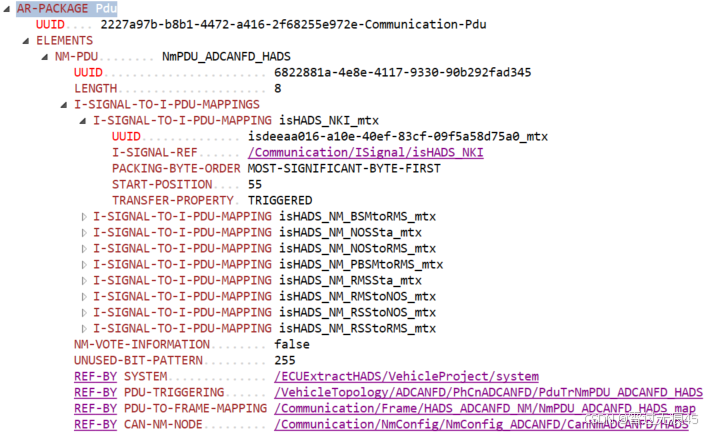
Signal中包含Init value、Length、datatype等信息;
NmConfig包含了Nm报文的各种配置,包括接收报文ID的范围、NM各状态基之间跳转的超时时间等,这里不详细展开描述。
TpConfig包含Tp报文的各种配置,包括STmin、BR、BS、CR、CS等各种时间参数,以及交互的各个节点等。
5、Signal中列出了所有Signal,每个Signal包括对其功能的描述及是否支持动态Length。
6、DataType中列出了所有数据类型和Compu-Method,以及其定义。
7、SignalGroup列出了所有SignalGroup及其中包含的Signal。
8、ComponentType列出了所有SW-Component。


















评论

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言
查看更多评论
添加红包








