









/****************************************************************************/
*
* (c) 光明工作室 2017-2037 COPYRIGHT
*
* 光明工作室团队成员大部分来自全国著名985、211工程院校。具有丰富的工程实践经验,
*本工作室热忱欢迎大家的光临。工作室长期承接嵌入式开发、PCB设计、算法仿真等软硬件设计。
*
*
*1)基于C8051、AVR、MSP430单片机开发。
*2)基于STM32F103、STM32F407等ARM处理器开发。(IIC、SPI、485、WIFI等相关设计)
*3)基于C6678、DM388等DSP处理器开发。(视频、网络、通信协议相关设计)
*4)基于QT、C#软件开发。
*5)基于OPENCV、OPENGL图像处理算法开发。(基于LINUX、WINDOWS、MATLAB等)
*6)无人机飞控、地面站程序开发。(大疆、PIX、 qgroundcontrol、missionplanner、MAVLINK)
*7) ROS机器人操作系统下相关开发。
*8)LINUX、UCOSII、VXWORKS操作系统开发。
*
*
* 联系方式:
* QQ:2468851091 call:18163325140
* Email:2468851091@qq.com
*
/ ****************************************************************************/
无人机通过图传将航拍到的图像存储并实时传送回地面站几乎已经是标配。如果想来点高级的——在无人机上直接处理拍摄的图像并实现自动控制要怎么实现呢?其实视觉跟踪已经在一些高端的消费级无人机上有了应用,不过玩现成的永远没有自己动手来劲;)。前段时间DIY了一个无人机三轴云台的视觉跟踪系统,除去云台花了¥370,本文将设计思路与实验效果分享出来。
一、基本配置
1.1 硬件
- 计算平台:树莓派3 (¥219.00)
- 摄像头:USB网络摄像头(¥108.00)
- 云台:参考上一篇博文FY650的组装
- JoyStick摇杆:用于测试和干预云台(¥8.00)
- Arduino UNO开发板:用于JoyStick输出信号的采集与AD转换并与树莓派串口通信(¥35.00)
1.2 软件
- 编程语言:Python
- 集成开发环境1:Eclipse,在windows平台上的视觉算法编程调试
- 集成开发环境2:Geany,在Linux平台上的算法与云台联调
1.3 准备知识
前面的几篇博文分别介绍了这个系统用到的基本知识:
二、设计步骤
2.1 云台调试
(1) 搭建一个用JoyStick控制云台转动的系统
因为树莓派GPIO没有模拟输入口,因此JoyStick接Arduino完成输入模拟信号的AD转换,并将转换后的信号通过串口发送给树莓派。通过这个系统结合示波器,搞清楚了所用云台转动控制的原理和控制信号特征。云台调试阶段系统连接图如下所示。最终通过树莓派的GPIO控制云台俯仰和水平转动。一开始想用Gopro作为视频采集设备,但查了很多资料也尝试了各种方法发现暂时没法实现(如果有的话请留言告诉我:),因此换了个便宜的网络摄像头。
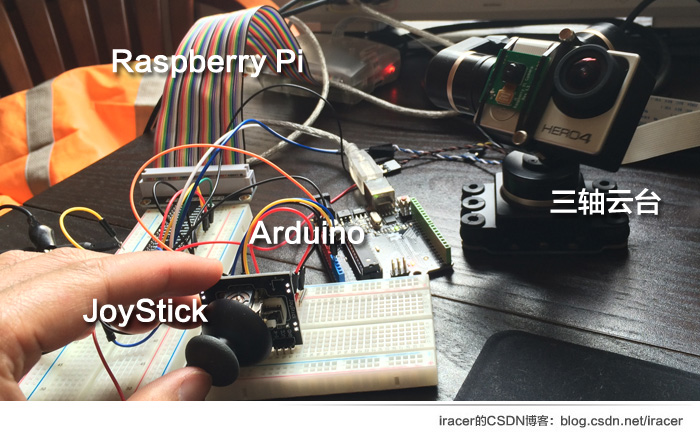

Gopro可以通过wifi将图像实时传给手机或pad,就是不能传给树莓派。
(2) 编写云台控制算法
根据上一步得到的云台控制信号特征,编写云台控制算法。输入是目标中心与图像中心的偏移量△x,△y,输出为云台俯仰、水平的控制变量dx,dy。
是的,摄像头外壳是纸糊的-_-。
2.2 算法调试
(1) 在windows平台上写跟踪算法
USB摄像头接上电脑用Eclipse写跟踪算法,输出偏差量等参数调试。
(2) 拷贝算法到树莓派调试
因为树莓派有多个GPIO可连云台,因此云台跟踪控制必须要在树莓派上调试。Python多平台部署的优点在这就体现出来了,直接将算法拷贝到树莓派即可运行调试。调试过程稍有点复杂,一开始的效果不好,耐心调,耐心改算法,效果也就慢慢出来了。

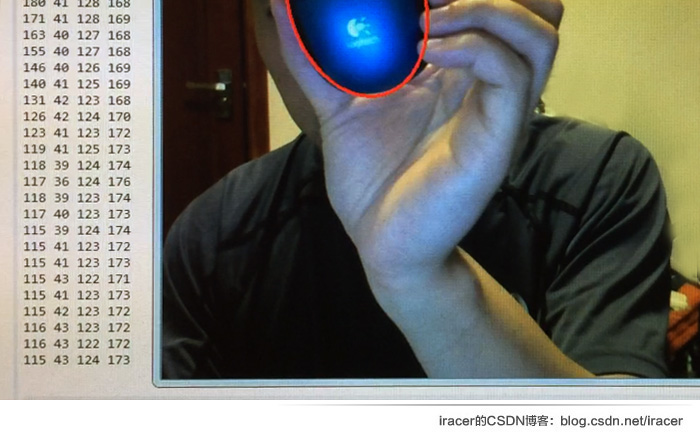
三、跟踪演示
跟踪效果截图:



目前云台和摄像头已经装上650无人机,航拍时的效果还有待实验。欢迎留言或邮件iracer@163.com讨论:)

转载请注明出处(本文更新链接):http://blog.csdn.net/iracer/article/details/54837636















 1353
1353

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









