






1、五次多项式路径规划:
采用五次多项式进行换道路径规划,只需明确车辆的起始 和 最 终 位 置 , 即在主车的初始状态 ![]() 和主车的目标状态
和主车的目标状态![]() 之间计算出一条能避免碰撞的平滑曲线作为换道路径。其函数模型表达式为
之间计算出一条能避免碰撞的平滑曲线作为换道路径。其函数模型表达式为![]()
![]() (公式1)
(公式1)
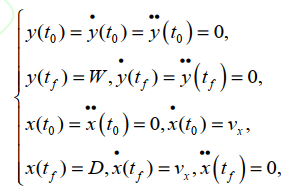
式中: 𝑎𝑖和𝑏𝑖为待定系数; 𝑡为时间; 𝑥(𝑡)为纵向状态; 𝑦(𝑡)为侧向状态。在车辆换道的初始状态,其侧向位移、侧向速度、侧向加速度均为零。经过纵向距离𝐷车辆完成换道,其目标状态的侧向位移为𝑊, 侧向速度和侧向加速度均为零。路径应满足如下约束:
 (公式2)
(公式2)
其中x、y表示纵向与横向的位移,一个点表示车速、两个点表示加速度。式中: 𝑡0为换道开始时刻为 0; 𝑡𝑓为换道结束时长; 𝑊为车辆换道的侧向位移,取 3.75 m,; 𝐷为车辆换道过程的纵向位移,换道过程中假设车辆纵向速度保持不变,则𝐷 = 𝑣𝑥 ∙ 𝑡𝑓。
将(公式2)代入(公式1),即可求解
 (公式3)
(公式3)
则路径规划方程为:
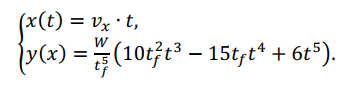 (公式4)
(公式4)
式中,tf是规划的换道时间,t为真实时间。
如果整个过程的纵向车速都维持初始车速匀速行驶,即Vx已知,且规划时间设置好,比如规划5s,即tf已知,则车辆行驶路径就规划好了。
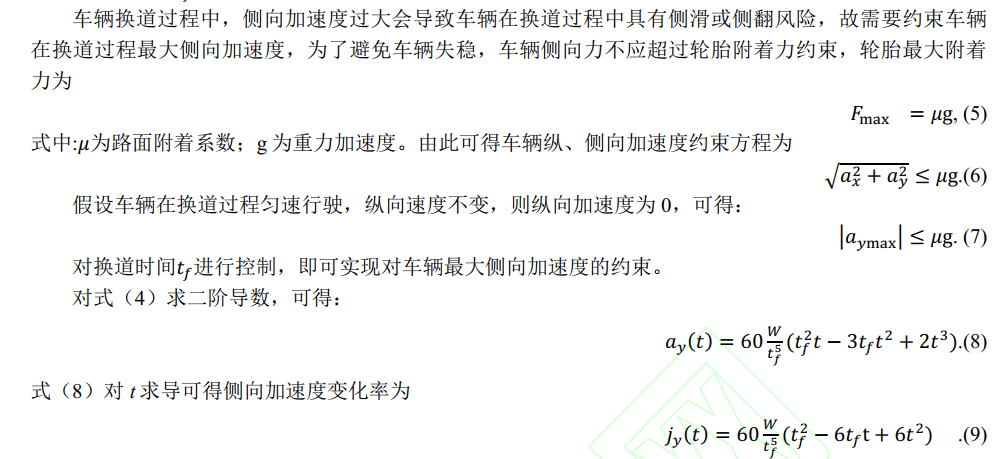
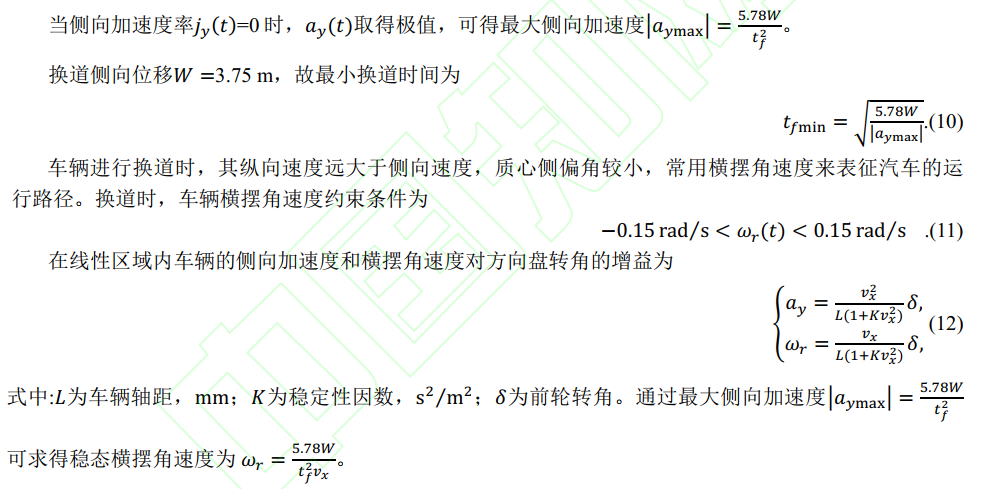
2、路径规划中的约束:
论文里还提及了两次换道,即存在换道中转点,如果有兴趣可以研读,由于很多读者找不到论文资源,本人在这给出,如有侵权请联系我计时删除。
| 基于双五次多项式的智能汽车换道路径规划研究 |















 4万+
4万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









