







 本文探讨了3D图形学中的齐次空间概念,详细解释了2D齐次空间如何投影到3D,并介绍了齐次矩阵在实现仿射变换中的作用。通过透视投影和平截头体的概念,阐述了投影矩阵的构建过程,特别是缩放系数与视场角的关系,以及如何影响最终的x、y、z方向的缩放和平移。这为理解GPU shader中的投影变换提供了关键的数学基础。
本文探讨了3D图形学中的齐次空间概念,详细解释了2D齐次空间如何投影到3D,并介绍了齐次矩阵在实现仿射变换中的作用。通过透视投影和平截头体的概念,阐述了投影矩阵的构建过程,特别是缩放系数与视场角的关系,以及如何影响最终的x、y、z方向的缩放和平移。这为理解GPU shader中的投影变换提供了关键的数学基础。
- 齐次空间
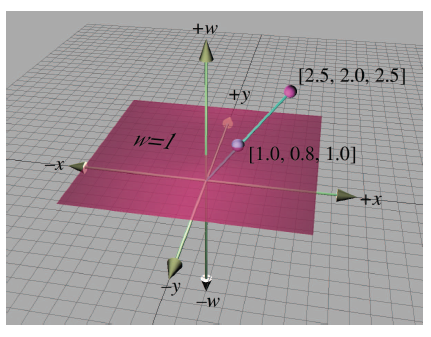
要理解3d的齐次空间,我们先理解2d的齐次空间。
2d的齐次空间可以理解为三维空间上的向量在(x, y, 1)平面上的投影. 投影结果是(x/z, y/z, 1)
- 齐次矩阵
- 齐次矩阵能够对向量做仿射变换,也就是能够将平移加入到矩阵中,这是3*3矩阵做不到的。
- 而4*3矩阵虽然也能做仿射变换,但是不能求逆矩阵,因为不是方阵。

-齐次矩阵的透视投影
空间坐标与其投影到投影平面上的坐标的关系:
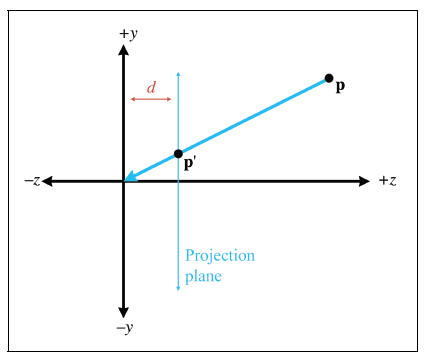

我们构造齐次矩阵来实现这样的计算

- 平截头体
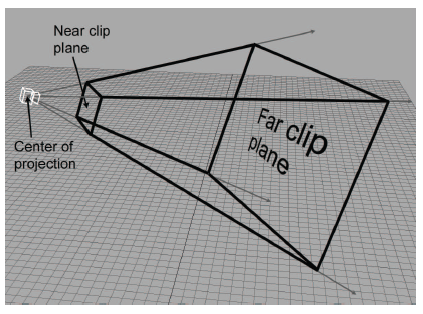
这样构造矩阵,得到齐次向量,然后用x,y,z分量除以w分量就得到真实的(x,y,z).
真正的投影也是在这一步发生的。这个在sha
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 476
476

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









