






1.文章信息
《Contextualized Spatial–Temporal Network for Taxi Origin-Destination Demand Prediction》是2019年发表在IEEE上的一篇文章。
2.摘要
本文提出了一项具有挑战性和值得探索的任务——出租车OD需求预测,其目标是预测未来时间段内全区域对之间的出租车需求。它的主要挑战来自于如何有效地捕获不同的背景信息来了解需求模式。针对这一问题,本文提出了一种新的情境化时空网络(CSTN),该网络由局部空间环境(LSC)、时间演化环境(TEC)和全局相关环境(GCC)三个部分组成。首先,LSC模块利用两个卷积神经网络分别从原点视图和终点视图学习出租车和需求的局部空间依赖关系;其次,TEC模块将出租车需求的局部空间特征和气象信息整合到卷积长短期记忆网络(Convolutional Long -term -term Memory Network, ConvLSTM)中,用于分析出租车需求演变。
最后,应用GCC模块对所有区域之间的相关性进行建模,通过计算全局相关特征作为所有区域特征的加权和,权重计算为对应区域对之间的相似度。在大规模数据集上的大量实验和评价充分证明了CSTN在出租车OD需求预测方面优于其他比较方法。
3.介绍
本文提出了一个具有挑战性的出租车OD需求预测任务,该任务旨在预测任意两个区域之间的未来出租车需求。如果能很好地预测出租车的出发地需求和乘客的目的地,可以更有效地进行出租车的预调度,满足乘客的需求,同时避免上述问题。该任务的关键挑战在于如何获取多样化的时空背景信息来了解需求模式。例如,一些空间相邻的区域通常具有相似的需求模式(如出租车请求数和需求趋势),这在我们的工作中称为局部空间背景(local spatial context, LSC)。此外,即使两个区域在空间上相距遥远,如果它们共享相似的功能(例如,它们都是居民区),需求模式可能仍然有一些相关性。我们把两个相距很远的区域之间的这种关系称为全局相关背景(GCC)。最后,出租车需求是一个时变过程,其演化与多种因素有关,如其当前状态和不断变化的气象,这被表述为时间演化背景(TEC)。
近年来,深度神经网络促进了上下文建模[的巨大进展。受此启发,文章提出了一种全新的情景化时空网络(CSTN),将局部空间背景、时间演化背景和全局相关背景很好地集成到一个统一的框架中,以解决出租车始发目的地需求预测问题。具体而言,我们提出的网络由三个组件组成,分别包括LSC模块、TEC模块和GCC模块,用于三种类型的环境建模。首先,LSC模块利用两个卷积神经网络分别从原点视图和终点视图学习出租车需求的局部空间依赖性;将两个网络的输出结合起来,生成最终的局部空间特征,其中包含了不同视角下出租车需求模式的混合信息。其次,TEC模块结合了将出租车需求的局部空间特征与气象信息结合到CNN-LSTM网络中进行出租车需求演化分析。第三,为了获取距离较远的区域之间的相关性,GCC模块计算任意两个区域之间的相似度,并将所有区域的特征与相似度权重相加,生成每个区域的全局相关性特征。这样,每个区域都包含了所有区域的信息,它主要与与它相似度高的区域相关。最后,结合TEC模块生成的局部时空特征和GCC模块生成的全局相关特征,对未来出租车始发地需求进行预测。
本工作的主要贡献有三个方面:
•将现有的出租车需求预测扩展到出租车OD需求预测任务,这对于智能交通系统来说更值得探索。据我们所知,我们是第一个研究跨区域出租车需求预测的。
•我们提出了一种全新的上下文化时空网络,将局部空间背景、时间演化背景和全局关联背景很好地整合到一个统一的框架中。
•在出租车原目的地需求预测的大规模基准上进行的大量实验表明,我们的方法比现有的最先进的方法要好一些。
4.模型
在本研究中,我们关注的是区域间出租车的始发目的地需求预测,而不是具体的位置。
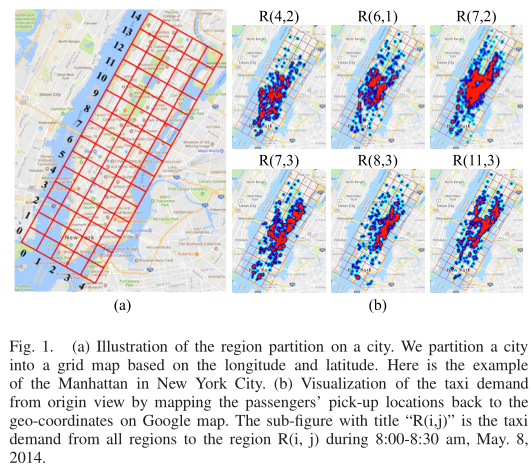
我们根据经纬度将一个城市划分为H ×W不重叠网格图。每个矩形网格代表城市中不同的地理区域。在网格图的第i行和第j列上的区域在下文中记为R(i, j)。
图1(a)显示了纽约市曼哈顿的分区。通过这种简单的划分方法,可以将原始的出租车请求记录直接转换为矩阵或张量,这是深度神经网络最常用的输入数据格式。
在我们的工作中,出租车的OD需求定义为每个时间间隔内从出发地到目的地的出租车请求总数。
我们用三维矩阵Xt∈R(N×H×W)表示时间区间t内的出租车出发地需求,H和W分别为城市网格图的高度和宽度。N是地区城市和它的总数等于H·W .具体来说,Xt (d, i0,j0),在目的地指数d = W·id + jd,需求从起源地区(i0,j0)到目的地区域R (id,jd), Xt (d, i0,j0)可以通过在时间间隔t内出租车请求记录测量。特别是,Xt的第d层通道,指示为Xt (d)∈R(H×W),是区域R的出租车来自所有地区的需求(id,jd)。图1(b)通过将乘客的接送地点映射回谷歌地图上的地理坐标,显示了Xt的一些通道。出租车原点需求,记为Ot∈R(H×W),可以很容易地用Xt(d)的累加(d=0,N-1)来计算。
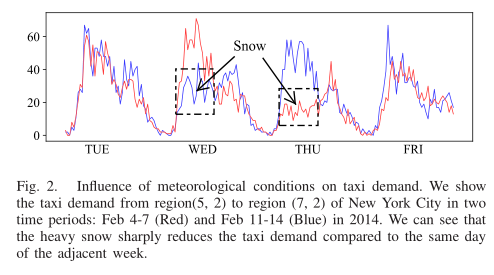
如图2所示,出租车需求受气象条件影响较大,因此我们也结合历史气象数据来处理此任务,将i时间区间的气象数据记为Mi。
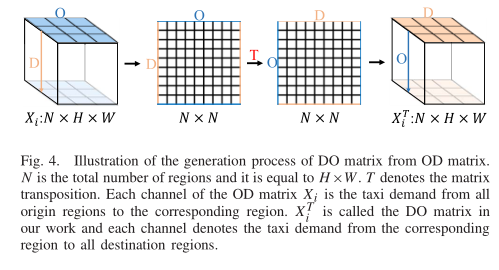
在这项工作中,我们提出的LSC模块同时从起点视图和目的地视图捕捉出租车需求的局部空间背景。,OD矩阵Xi的每个通道都是从所有始发区域到相应区域的出租车需求,因此我们将Xi上的卷积运算定义为始发视图建模。为了从目标视图建模局部空间环境,我们使用图4中描述的转换过程从Xi生成DO矩阵XTi。具体来说,我们首先将Xi重塑为2D矩阵,然后执行常见的转置操作。最后,将转置矩阵重组为三维张量XTi。XTi的每个通道是从相应区域到所有目的地区域的出租车需求。
1.局部空间背景建模
一般而言,出租车需求通常与当地的空间位置有关,空间相邻区域可能具有相似的需求模式。在这项工作中,LSC模块同时从出发地视图和目的地视图捕捉出租车需求的本地空间背景。
如图3底部所示,我们的LSC模块由一个双视图ConvNet实现,该网络采用Xi和XiT输入,分别从不同视图捕获局部空间背景。LSC模块的整个过程可以表示为:
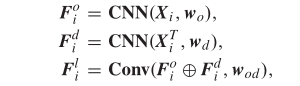
其中wo和wd分别是源视图CNN和目的视图CNN的参数。wod表示融合卷积层的参数⊕ 表示特征连接操作。Fl i是最终的局部空间特征,它包含了出租车需求的局部空间背景,包括起点视图和终点视图。
2.时空演化背景建模
出租车需求是一个随时间变化的过程,通常受到多种复杂因素的影响。除了自身的内部状态,气象条件也会影响未来的需求。因此,我们结合历史需求特征和不断变化的气象条件,把握出租车需求在时间维度上的演变趋势。
我们的目标是利用历史需求和前n个时间间隔的气象条件预测出租车需求Xt。对于气象数据Mi,我们使用多层感知器(MLP)对其进行编码,该感知器由三个堆叠的全连接层实现,分别具有64、16和8个神经元。然后我们复制MLP H·W时间的输出特征,并构建3D气象特征Fm i∈ R(8×H×W)。我们将Fl i和Fm i与卷积层相结合,其表示为:

wlm表示具有32个滤波器的卷积层的参数。Flmi是整合气象信息的局部空间特征。
n次迭代后,ConvLSTM的隐藏状态表示为hn。我们通过将hn馈入具有Clt滤波器的卷积层来生成局部时空特征Flt,其表示为:

其中wlt是卷积层的参数,Flt表示出租车需求的时间演变背景特征。
3.全局相关背景建模
在上述两个模块中,ConvNets和ConvLSTM仅捕获和维护出租车需求的本地环境。然而,出租车需求分布也与区域属性有关,例如,城市不同区域的大多数居民区在早高峰时段可能有较高的出租车需求。因此,即使这两个地区相距很远,只要两个地区的属性一致,它们仍可能有相似的出租车需求模式。我们将这种关联称为全局相关环境。
具体而言,我们将每个区域的全局相关特征生成为所有区域特征的加权和,权重计算为相应区域对之间的相似度。这样,每个区域都包含所有区域的信息,并且主要与与其高度相似的区域相关。我们详细介绍了GCC模块的每个步骤,如下所示。首先,我们将Flt馈入具有Cs滤波器的卷积层,以生成嵌入特征Fs,然后将其重塑为2D矩阵,其可以表示为:
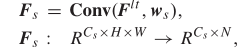
其中N等于H·W,ws是卷积参数。每一列Fs代表一个区域的特征。我们进一步计算了相似度矩阵S∈ R(N×N):Fs之间的点积运算Fs∈ R(Cs×N)及其转置矩阵FTs∈ RN×Cs,并对S的每一列执行Softmax运算,表示为:

Si,j是具有索引i和索引j的两个区域之间的归一化相似性权重。
在获得相似度矩阵S之后,我们通过将所有区域的特征与计算出的相似度权重相加来计算每个区域的全局相关特征。我们用点积运算来实现这个过程。我们将Flt重塑为尺寸Clt×N,然后将Flt和S点积以计算全局特征Fg,再将其重塑为尺寸Clt×H×W。整个过程可以表示为:
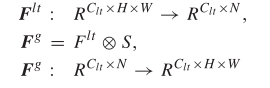
特征Fg∈ R(Clt×H×W)编码全局相关环境,但缺乏结构局部性,这会导致性能下降。因此,我们通过连接Flt和Fg来生成新的特征Fltg。因此,特征Fltg与局部空间环境、时间演化环境和全局相关环境的混合信息相结合。
最后,我们预测了时间间隔t内出租车始发地-目的地需求,表示ˆXt+1∈ R(N×H×W),通过将Fltg输入线性回归,可公式化为:

其中T是由具有N个滤波器的卷积层实现的线性回归,双曲正切tan确保输出值介于−1和1。
5.案例分析
为了评估所有比较方法的性能并进一步促进相关研究,我们还为此任务创建了第一个基准,称为NYC-TOD。它由两个数据类别组成,包括出租车始发地需求数据和2014年纽约市的气象数据。我们选择最近60天的数据作为测试集,之前的所有数据作为训练集。
1)出租车OD需求数据:我们在工作中选择曼哈顿作为研究区域。我们首先将曼哈顿划分为经纬度为15×5 网格图。每个网格代表一个大小约为0.75km×0.75km的地理区域。曼哈顿的详细分区如图1所示。
排除始发地或目的地不在曼哈顿区的出行后,我们得到了1.32亿次出租车出行记录。最后,我们可以通过根据出租车出行记录的时间戳和地理坐标计算所有区域之间的出租车出行次数,生成每个时间间隔内的出租车始发地-目的地需求矩阵。在此数据集中,每个时间间隔设置为半小时。
图5总结了每天的出租车需求总数,显示纽约市每月有超过1000万辆出租车需求。出租车需求的空间分布如图1(b)所示,我们可以观察到大多数出租车需求聚集在市中心和交通枢纽。
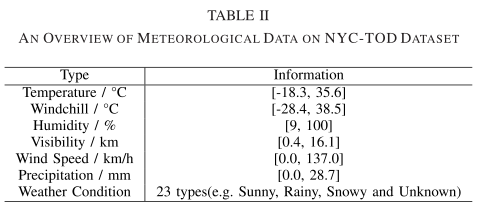
2)气象数据:由于所有地区的气象条件在同一时间间隔内非常相似,我们将中央公园站观测到的气象数据视为整个曼哈顿区的气象数据。我们在研究中考虑了温度、风寒、湿度、能见度、风速、降水和天气条件的影响。天气状况类别和其他六个气象指标的范围如表II所示。此外,天气状况通过一热编码[50]进行数字化,而其他六个数字指示器通过MinMax线性归一化缩放到[0,1]范围内。最后,时间间隔t中的气象数据可以表示为向量Mt∈ R^29。
评估指标:我们采用平均百分比误差(MAPE)和均方根误差(RMSE)作为衡量所有方法性能的指标,在评估时,我们遵循前面的工作,在每个时间间隔内过滤地面真实度小于5的OD对或起点区域,因为在实际应用中,这种低滑行需求总是可以忽略的。
1)整个测试集的性能:我们首先在整个NYC-TOD测试集上对我们提出的方法与其他方法进行了比较。表III总结了所有方法的结果,可以观察到,我们的方法比其他竞争方法有一定的优势。
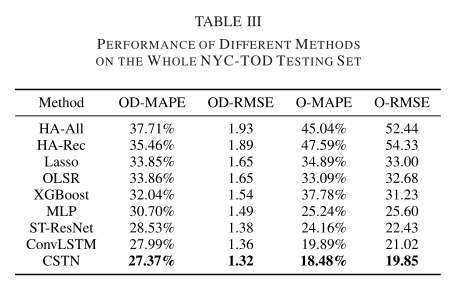
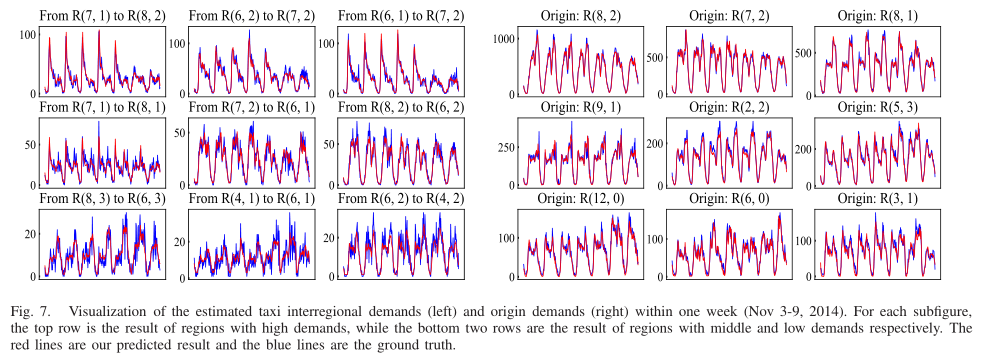
图7显示了CSTN预测的计程车始发地需求和计程车目的地需求。我们可以观察到,我们的方法对于预测不同规模的出租车需求是稳健的。
6.结论
我们使用情景化化时空网络(CSTN)来解决这个问题,该网络将局部空间环境、时间演化环境和全局相关环境集成在一个统一的框架中。通过从历史数据中学习出租车需求模式,提出的CSTN可以对所有区域对进行出租车需求预测。纽约市1.32亿次出租车出行记录用于培训和评估我们的模型。实验结果表明,我们的模型实现了24.93%的OD-MAPE和12.92%的O-MAPE,在出租车OD需求预测和始发地需求预测两个任务上都优于其他最先进的方法。此外,我们扩展了CSTN来预测长期出租车需求,我们的方法实现了非常实用的性能。
Attention
欢迎关注微信公众号《当交通遇上机器学习》!如果你和我一样是轨道交通、道路交通、城市规划相关领域的,也可以加微信:Dr_JinleiZhang,备注“进群”,加入交通大数据交流群!希望我们共同进步!



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











