







为什么要写这篇博客、因为我在调我的51单片机wifi小车的双舵机摄像头的时候。从一开始对PWM很陌生到完全理解PWM调节并调好了两个舵机加起来花费了整整一天的时间。也看了很多的资料。这里综合一下,希望能帮助到像我一样需要使用PWM调舵机的人。
我用的舵机是———-盛辉SG90舵机(标准版)

对就是上面这个东东
下面来简单的看一下它的工作原理:
三根线:
橙色—————————–信号线
红色—————————–VCC
棕色—————————–GND
首先、在这个舵机的内部有一个基准电压。如果我们想要控制这个舵机的转动。那么我们就要通过一定信号线给它一个一定周期的直流偏置电压。
最终舵机内部会根据直流偏置电压与内部基准电压进行比较,获得电压差输出。最后电压差的正负输出到电机驱动芯片决定电机的正反转。
经过这样一个简单的叙述我们大概知道了该怎么控制舵机的正反转。
下面我们了解一下该给它什么样周期的直流偏置电压呢?
下看一下占空比的概念(图示):
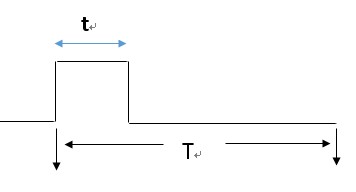
如上图:占空比 = t / T;
想要控制舵机,那么我们就需要一个周期T = 20ms。高电平小t等于0.5ms-2.5ms之间的这样一个方波。
为什么是这个参数呢?
因为 t (高电平在一个周期内持续时间)
t = 0.5ms——————-舵机会转动 0 °
t = 1.0ms——————-舵机会转动 45°
t = 1.5ms——————-舵机会转动 90°
t = 2.0ms——————-舵机会转动 135°
t = 2.5ms——————-舵机会转动180°
不要问我为什么,哈哈哈,因为这和舵机内部的基准电压有关,我们只要知道它到底如何用就可以了,里面的电路实现可以不用深究!
通过上面的一下基础概念性的知识我们已经大概了解了舵机的工作原理。接下来让我们来看一下如果用C51单片机PWM来调节控制它
对于T = 20ms 。我们可以定时器0(方式1)来计数。每次0.1ms。如果计数达到200则说明一个周期到了,计数清0
补充:
11.0592MHz晶振——0.1ms TH0 = 0xff,TL0 = 0xa3
12.0000MHz晶振——0.1ms TH0 = 0xff,TL0 = 0x9c
对于t = 0.5ms—–2.5ms我们可以采用全局变量。让全局变量等于5—25之间,因为我的舵机的一个计数周期是0.1ms,这样全局变量的5—25正好就是0.5ms—2.5ms
有了这个对应关系,那么程序变的简单起来
一起来看
/* 因为我是使用Android APP通过串口给单片机发送指令来控制两个舵机的转动
所以下列程序的参数在这里做个解释:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 1758
1758

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











