






从零学自动驾驶lattice规划(上)--参考线,frenet标架,多项式拟合
算法详细文档说明。
2种代码实现:matlab和c++
ID:6999692698493308
autorobot

从零学自动驾驶lattice规划(上)–参考线,frenet标架,多项式拟合
自动驾驶技术作为当今科技领域的热点之一,正逐渐引领着未来出行的发展趋势。而自动驾驶中的规划算法,作为实现车辆运动控制的核心环节之一,扮演着重要角色。本文将从零开始,详细介绍了一种常用的自动驾驶规划算法——lattice规划算法,并结合参考线、frenet标架以及多项式拟合等关键概念进行了深入剖析。
在自动驾驶过程中,规划算法旨在为车辆规划一条安全、高效的行驶路径。而lattice规划算法则是一种常用的离散化路径规划算法,能够将连续的路径规划问题转化为离散的决策问题,极大地简化了计算复杂度。
首先,我们需要了解参考线的概念。参考线是指一条用于指导车辆运动的基准线,可以是车道中心线、车辆前方的参考路径或者是预先规划的路径。在lattice规划算法中,参考线起到了非常重要的作用。通过提前规划好的参考线,车辆可以根据实际情况进行路径修正,从而实现安全、高效的行驶。
接着,我们来介绍frenet标架。frenet标架是一种常用的路径参数化方法,可以将路径上的点用一对参数(s, d)进行描述,其中s表示车辆沿参考路径行驶的距离,d表示车辆距离参考路径的横向偏移。通过将路径上的点进行参数化,我们可以更加方便地进行路径规划和车辆控制。
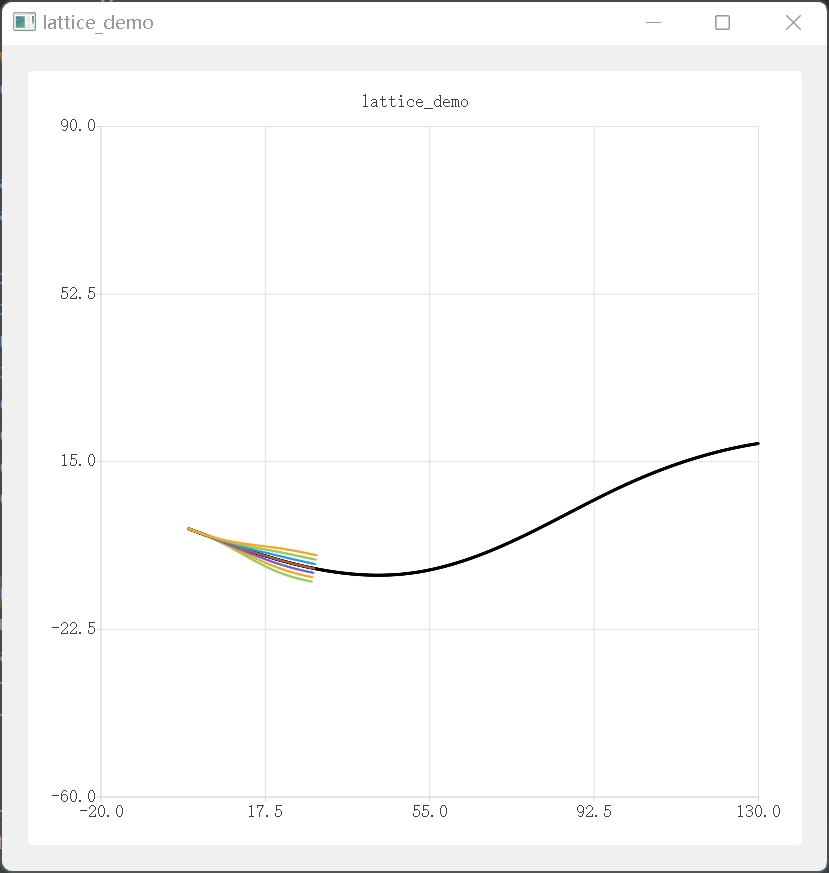
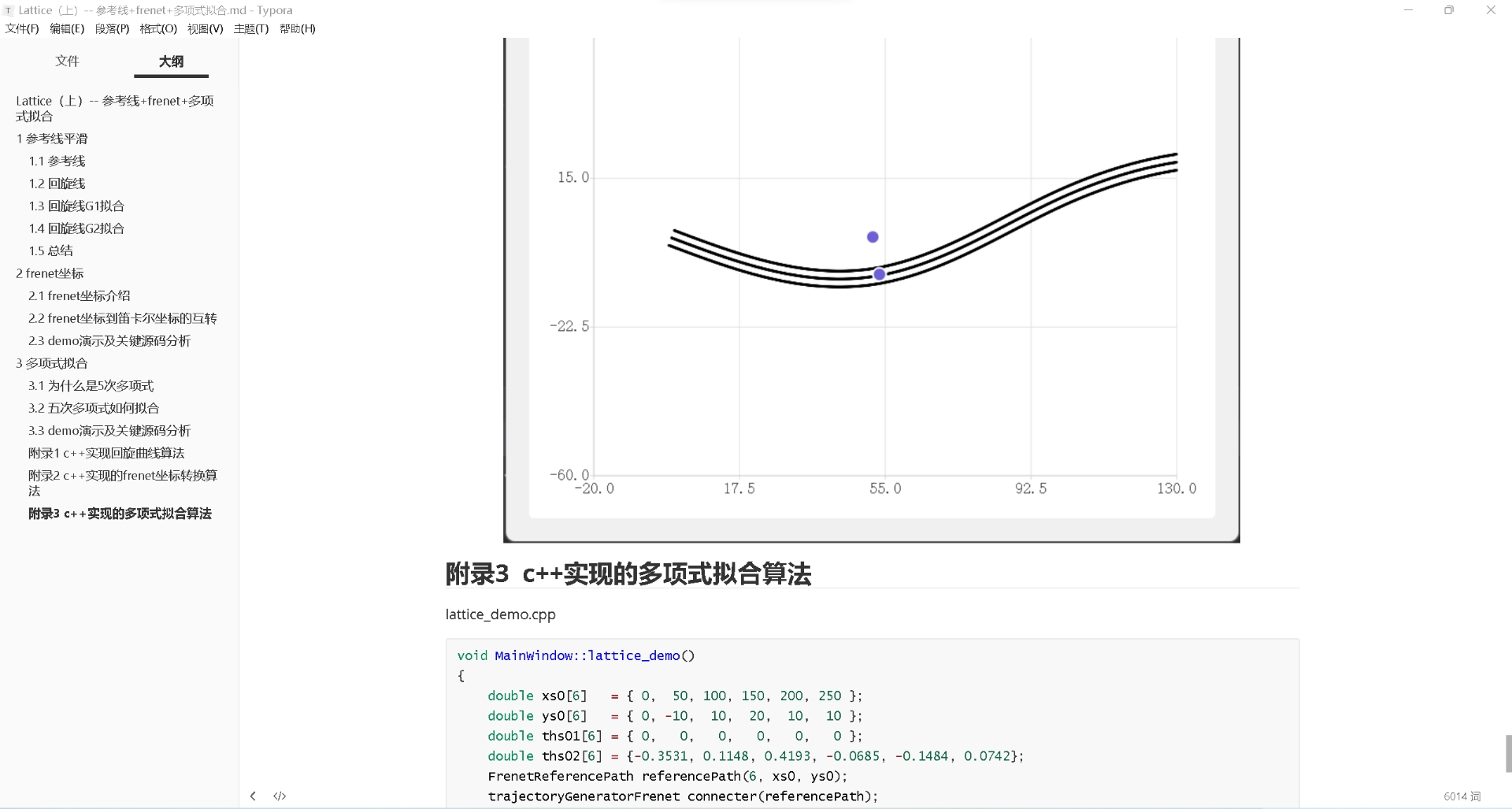
在lattice规划算法中,多项式拟合是一个重要的技术手段。它可以将一条曲线用一个多项式函数进行拟合,从而实现路径规划的离散化。通过多项式拟合,我们可以将连续的参考路径离散化为一组离散的路径点,为路径规划提供了基础。
在实现lattice规划算法的过程中,我们可以选择使用不同的编程语言,如Matlab和C++等。这两种编程语言各有优势,前者可以提供较为方便的数学计算和图形化界面,后者则更适合于高性能计算和实时控制。根据实际需要,选择合适的编程语言进行算法实现。
综上所述,本文详细介绍了自动驾驶中的lattice规划算法,并结合参考线、frenet标架以及多项式拟合等关键概念进行了深入探讨。通过学习本文,读者可以深入了解lattice规划算法的原理和实现方法,并结合具体应用场景进行相应的算法实现。同时,本文还提供了两种常用的代码实现方式,分别是Matlab和C++。无论是对于初学者还是对于已经有一定经验的开发者而言,本文都能为其提供一份全面且实用的技术参考。让我们一起进入自动驾驶的世界,共同推动科技的发展。
相关的代码,程序地址如下:http://fansik.cn/692698493308.html
















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









