









完整源码下载地址
点击下载源码
YOLOv3目标检测网络
YOLO算法简介
-
相关算法
-
滑动窗口
采用滑动窗口的目标检测算法将检测问题转化为了图像分类问题。其基本原理就是采用不同大小和比例(宽高比)的窗口在整张图片上以一定的步长进行滑动,然后对这些窗口对应的区域做图像分类,这样就可以实现对整张图片的检测了。
-
非极大值抑制
首先从所有的检测框中找到置信度最大的那个框,然后挨个计算其与剩余框的交并比(IOU),如果其值大于一定阈值(重合度过高),那么就将该框剔除;然后对剩余的检测框重复上述过程,直到处理完所有的检测框。
-
-
YOLO算法
YOLO将对象检测重新定义为一个回归问题。它将单个卷积神经网络(CNN)应用于整个图像,将图像分成网格,并预测每个网格的类概率和边界框。对于每个网格,网络都会预测一个边界框和与每个类别(汽车,行人,交通信号灯等)相对应的概率。每个边界框可以使用四个描述符进行描述:
- 边界框的中心
- 高度
- 宽度
- 值映射到对象所属的类
此外,该算法还可以预测边界框中存在对象的概率。如果一个对象的中心落在一个网格单元中,则该网格单元负责检测该对象。每个网格中将有多个边界框。在训练时,我们希望每个对象只有一个边界框。因此,我们根据哪个Box与ground truth box的重叠度最高,从而分配一个Box来负责预测对象。
最后,对每个类的对象应用非最大值抑制的方法来过滤出“置信度”小于阈值的边界框。这为我们提供了图像预测。

网络结构
-
YOLOv3采用了称之为Darknet-53的网络结构(含有53个卷积层),它借鉴了残差网络的做法,在一些层之间设置了快捷链路。下图展示了其基本结构。
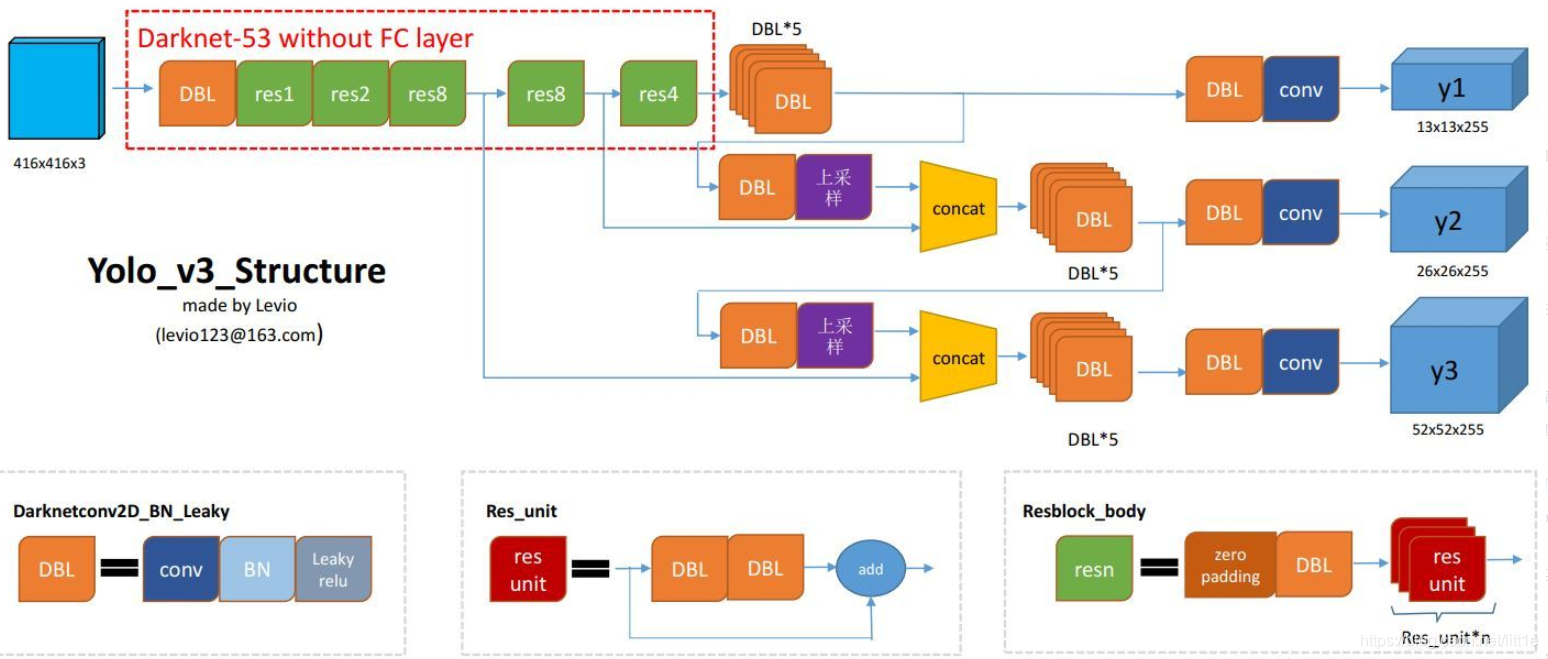
其中Darknet-53的具体结构如下,其采用4484483作为输入,左侧数字表示多重复的残差组件个数,每个残差组件有两个卷积层和一个快捷链路。
主要代码实现
主要参数
train_params = {
"data_dir": "data/data6045", # 数据目录
"train_list": "train.txt", # 训练集文件
"eval_list": "eval.txt",
"class_dim": -1,
"label_dict": {}, # 标签字典
"num_dict": {},
"image_count": -1,
"continue_train": True, # 是否加载前一次的训练参数,接着训练
"pretrained": False, # 是否预训练
"pretrained_model_dir": "./pretrained-model",
"save_model_dir": "./yolo-model", # 模型保存目录
"model_prefix": "yolo-v3", # 模型前缀
"freeze_dir": "freeze_model",
"use_tiny": False, # 是否使用 裁剪 tiny 模型
"max_box_num": 8, # 一幅图上最多有多少个目标
"num_epochs": 15, # 训练轮次
"train_batch_size": 12, # 对于完整yolov3,每一批的训练样本不能太多,内存会炸掉;如果使用tiny,可以适当大一些
"use_gpu": True, # 是否使用GPU
"yolo_cfg": { # YOLO模型参数
"input_size": [3, 448, 448], # 原版的边长大小为608,为了提高训练速度和预测速度,此处压缩为448
"anchors": [7, 10, 12, 22, 24, 17, 22, 45, 46, 33, 43, 88, 85, 66, 115, 146, 275, 240], # 锚点??
"anchor_mask": [[6, 7, 8], [3, 4, 5], [0, 1, 2]]
},
"yolo_tiny_cfg": { # YOLO tiny 模型参数
"input_size": [3, 256, 256],
"anchors": [6, 8, 13, 15, 22, 34, 48, 50, 81, 100, 205, 191],
"anchor_mask": [[3, 4, 5], [0, 1, 2]]
},
"ignore_thresh": 0.7,
"mean_rgb": [127.5, 127.5, 127.5],
"mode": "train",
"multi_data_reader_count": 4,
"apply_distort": True, # 是否做图像扭曲增强
"nms_top_k": 300,
"nms_pos_k": 300,
"valid_thresh": 0.01,
"nms_thresh": 0.40, # 非最大值抑制阈值
"image_distort_strategy": { # 图像扭曲策略
"expand_prob": 0.5, # 扩展比率
"expand_max_ratio": 4,
"hue_prob": 0.5, # 色调
"hue_delta": 18,
"contrast_prob": 0.5, # 对比度
"contrast_delta": 0.5,
"saturation_prob": 0.5, # 饱和度
"saturation_delta": 0.5,
"brightness_prob": 0.5, # 亮度
"brightness_delta": 0.125
},
"sgd_strategy": { # 梯度下降配置
"learning_rate": 0.002,
"lr_epochs": [30, 50, 65], # 学习率衰减分段(3个数字分为4段)
"lr_decay": [1, 0.5, 0.25, 0.1] # 每段采用的学习率,对应lr_epochs参数4段
},
"early_stop": {
"sample_frequency": 50,
"successive_limit": 3,
"min_loss": 2.5,
"min_curr_map": 0.84
}
}
模型建立
class YOLOv3(object):
def __init__(self, class_num, anchors, anchor_mask):
self.outputs = [] # 网络最终模型
self.downsample_ratio = 1 # 下采样率
self.anchor_mask = anchor_mask # 计算卷积核???
self.anchors = anchors # 锚点
self.class_num = class_num # 类别数量
self.yolo_anchors = []
self.yolo_classes = []
for mask_pair in self.anchor_mask:
mask_anchors = []
for mask in mask_pair:
mask_anchors.append(self.anchors[2 * mask])
mask_anchors.append(self.anchors[2 * mask + 1])
self.yolo_anchors.append(mask_anchors)
self.yolo_classes.append(class_num)
def name(self):
return 'YOLOv3'
# 获取anchors
def get_anchors(self):
return self.anchors
# 获取anchor_mask
def get_anchor_mask(self):
return self.anchor_mask
def get_class_num(self):
return self.class_num
def get_downsample_ratio(self):
return self.downsample_ratio
def get_yolo_anchors(self):
return self.yolo_anchors
def get_yolo_classes(self):
return self.yolo_classes
# 卷积正则化函数: 卷积、批量正则化处理、leakrelu
def conv_bn(self,
input, # 输入
num_filters, # 卷积核数量
filter_size, # 卷积核大小
stride, # 步幅
padding, # 填充
use_cudnn=True):
# 2d卷积操作
conv = fluid.layers.conv2d(input=input,
num_filters=num_filters,
filter_size=filter_size,
stride=stride,
padding=padding,
act=None,
use_cudnn=use_cudnn, # 是否使用cudnn,cudnn利用cuda进行了加速处理
param_attr=ParamAttr(initializer=fluid.initializer.Normal(0., 0.02)),
bias_attr=False)
# batch_norm中的参数不需要参与正则化,所以主动使用正则系数为0的正则项屏蔽掉
# 在batch_norm中使用leaky的话,只能使用默认的alpha=0.02;如果需要设值,必须提出去单独来
# 正则化的目的,是为了防止过拟合,较小的L2值能防止过拟合
param_attr = ParamAttr(initializer=fluid.initializer.Normal(0., 0.02),
regularizer=L2Decay(0.))
bias_attr = ParamAttr(initializer=fluid.initializer.Constant(0.0),
regularizer=L2Decay(0.))
out = fluid.layers.batch_norm(input=conv, act=None,
param_attr=param_attr,
bias_attr=bias_attr)
# leaky_relu: Leaky ReLU是给所有负值赋予一个非零斜率
out = fluid.layers.leaky_relu(out, 0.1)
return out
数据集基本信息
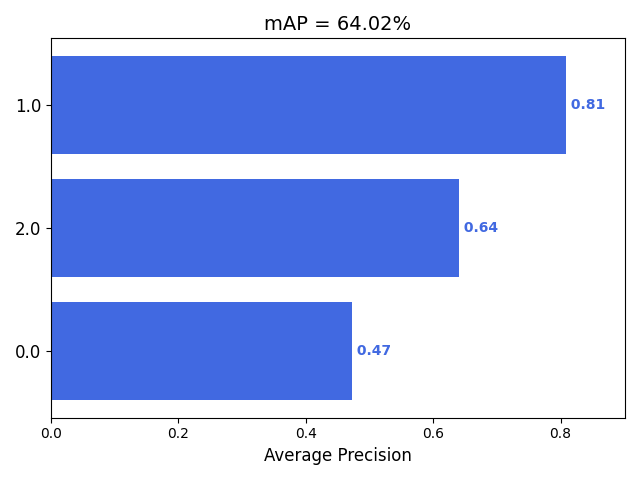
- 本组使用的数据集共有900张图片,其中500张来自校园拍摄实景,其余为下载的特定分类图片。
- 所有图片宽高比均为4:3,分辨率为800*600。数据集图片主要分四类,包括单独的行人、自行车与汽车与前三类混杂在一起的图片。
训练过程中的参数调整与模型优化
YOLO和YOLO-tiny对比
| 模型 | 训练30轮所用时长 |
|---|---|
| YOLO | 2h9m |
| YOLO-tiny | 1h41m |
参数调整
- max_box_num": 8
- nms_thresh": 0.40
- valid_thresh": 0.015
- 优化显存
- os.environ[“FLAGS_fraction_of_gpu_memory_to_use”] = ‘0.92’
- os.environ[“FLAGS_eager_delete_tensor_gb”] = ‘0’
- os.environ[“FLAGS_memory_fraction_of_eager_deletion”] = ‘1’
- os.environ[“FLAGS_fast_eager_deletion_mode”]=‘True’
模型优化
- 优化器更改:原优化器为SGD
optimizer=fluid.optimizer.SGDOptimizer(
learning_rate=fluid.layers.piecewise_decay(boundaries, values), regularization=fluid.regularizer.L2Decay(0.00005))
- 变更为Adam算法
optimizer=fluid.optimizer.AdamOptimizer(learning_rate=0.01,beta1=0.9,beta2=0.999,regularization=fluid.regularizer.L2Decay(0.00005))

项目备注
1、资源项目源码均已通过严格测试验证,保证能够正常运行;
2、项目问题、技术讨论,可以给博主私信或留言,博主看到后会第一时间与您进行沟通;
3、本项目比较适合计算机领域相关的毕业设计课题、课程作业等使用,尤其对于人工智能、计算机科学与技术等相关专业,更为适合;
4、下载使用后,可先查看README.md文件(如有),本项目仅用作交流学习参考,请切勿用于商业用途。
如有其他毕设方面的需求、咨询,也可联系博主
完整源码资源下载地址
















 467
467

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











