







更换一下课程的顺序,我觉得首先应该先理解的是,曲面参数化是什么?参数是指的什么?
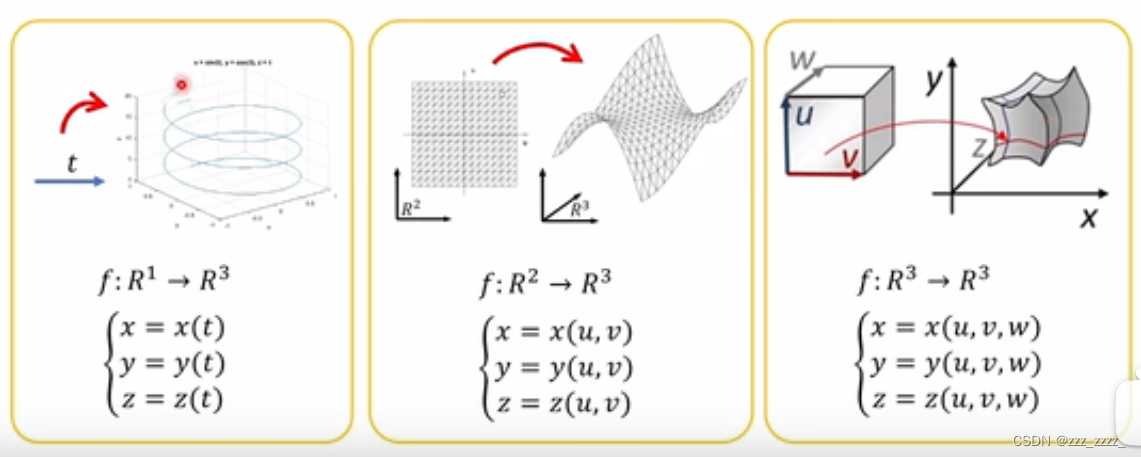
上图中,第1幅是一个螺旋线放在了三维空间中,但实际上用一维空间的线就可以将它表示出来,所以说,它的本质上是一维的;第2幅是一个曲面放在了三维空间上,但实际上用二维空间的平面就可以将它表示出来,所以说,它的本质上是二维的;第3幅的是三维空间中的一个看似不太规则的体,它的本质上是三维的。这些图形图像本质上所处的维度叫做“本征维度”。
参数化的问题就是要寻求数据的本征维度,然后进行低维嵌入。但寻求数据的本征维度并不容易,如果找到的维度过高,会造成数据冗余;如果找到的维度过低,则会造成数据的丢失。
这就是曲面参数化的工作内容。
再看曲面参数化的一些实例:
【例1】地图——地球表面展开(不同的展开方式,最后得到的地图也是不一样的)
【例2】橘子剥皮(艺术:动物形象)
【例3】多片展开
曲面参数化的几何直观:3D曲面展开成2D平面
曲面参数化的数学本质:3D曲面在2D平面的嵌入(embedding)/映射(mapping)
(这与上面提及的内容也相一致)
曲面参数化的应用(要根据不同的下游任务来选择不同的方法):
地图制作、曲面贴图、纹理地图、曲线/曲面拟合、曲面渲染
(把3D转为2D可以更加方便的存储和表达曲面上的各种信息)
参数化的基本方法(两种):主打“化繁为简”
第一,函数的简化:映射f 线性函数空间(基函数的线性组合)
第二,定义域的简化:简单区域(e.g.三角形)的拼接
参数化的度量:什么是最优的?
不同的最优准则(破坏一些什么,保留一些什么【根据目的】):度量曲面的几何性质(几何量)的变化
保持不同几何性质的映射:保角映射(共形)、保面积映射、等距映射(保角+保面积)
如何做好参数化?
没有面积的翻转
数学度量:涉及雅可比行列式的几何意义(度量了局部有向面积的伸缩比)
小于0:发生了翻转
大于0小于1:面积收缩
大于1:面积扩张
几何形变/扭曲 小
数学度量:涉及SUV分解的理论知识
简单介绍了曲面参数化的主要方法(后续会详细讲解)
广义参数化
球面参数化:构建封闭曲面与球面的映射
相容性网络:构建两个曲面之间的映射(一一对应) 采样点一一对应、三角面一一对应
体参数化:比如四面体之间的变换















 3958
3958











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









