










这段时间把项目的剩余部分全部完成了,包括角点检测改进和恢复追踪。这一节先继续讲利用OpenGL画AR物体。
上一节中我们利用SolvePnP得到了相机的姿态(rotation和translation),利用姿态信息我们可以通过加载model_view_matrix来控制opengl里的相机。
首先我试了用cmake重新编译with_opengl版的opencv,但是失败了(后来有了成功编译with_openni的经验后,回来再试with_opengl成功了,但是项目都写完了改起来太麻烦,以后有机会会改的),所以我使用了pthread库创建了另一个线程去跑之前tracking的程序,主线程跑opengl画图程序。双线程并行运行也是项目的核心思想,可以大大减少时间,提高系统运行速度。pthread的配置和使用方法网上有很多,这里就不提了。OpenGL的用法网上也有很多方法,这里也不提了。
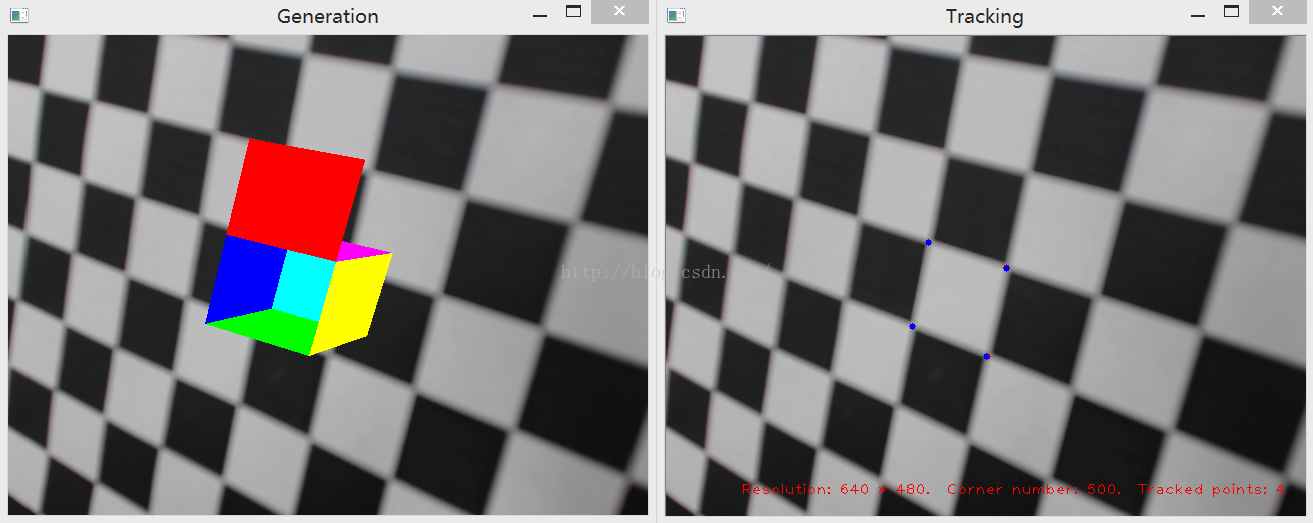
项目中我们的opengl窗口有两个功能,一个是draw_map()在真实场景上画AR物体,另一个是draw_camera()画三维坐标系,方便我们观察opengl中相机的位置。前者无法用鼠标控制,后者可以用鼠标调节显示角度。
void display(void)
{
glClear (GL_COLOR_BUFFER_BIT | GL_DEPTH_BUFFER_BIT);
glLoadIdentity(); //加载单位矩阵
if(drawmap)
{
gluLookAt(0,0,2,
0,0,0,
0,1,0);
draw_map();
}
else
{
CalEyePostion();
gluLookAt(eye[0], eye[1], eye[2],
center[0], center[1], center[2],
0, 1, 0);
draw_camera();
}
waitKey(15);
glutSwapBuffers();
}
void draw_map()
{
if(image.data!=NULL)
{
cvtColor(image, texttmp, CV_BGR2RGB);
flip(texttmp,texttmp,0);
glEnable(GL_TEXTURE_2D);
glTexImage2D(GL_TEXTURE_2D, 0, 3, 640, 480 , 0, GL_RGB, GL_UNSIGNED_BYTE, texttmp.data);
glPushMatrix();
glTranslated(0, 0, -30);
glScaled(1.0/640.0, 1.0/480.0, 1.0);
glScaled(31, 31, 1);
glTranslated(-320, -240, 0.0);
glBegin(GL_QUADS);
glTexCoord2i(0, 0); glVertex2i(0, 0);
glTexCoord2i(1, 0); glVertex2i(640, 0);
glTexCoord2i(1, 1); glVertex2i(640, 480);
glTexCoord2i(0, 1); glVertex2i(0, 480);
glEnd();
glPopMatrix();
}
glDisable(GL_TEXTURE_2D);
if(needtomap && trackingpoints == 4)
{
/* Use depth buffering for hidden surface elimination. */
glEnable(GL_DEPTH_TEST);
Mat rotM(3,3,CV_64FC1);
Rodrigues(rvec,rotM);
glPushMatrix();
double model_view_matrix[16]={
rotM.at<double>(0,0),-rotM.at<double>(1,0),-rotM.at<double>(2,0),0,
rotM.at<double>(0,1),-rotM.at<double>(1,1),-rotM.at<double>(2,1),0,
rotM.at<double>(0,2),-rotM.at<double>(1,2),-rotM.at<double>(2,2),0,
tv[0],-tv[1],-tv[2],1
};
glLoadMatrixd(model_view_matrix);
glRotated(180.0,1.0,0.0,0.0);
draw_object();
/* Use depth buffering for hidden surface elimination. */
glDisable(GL_DEPTH_TEST);
glPopMatrix();
}
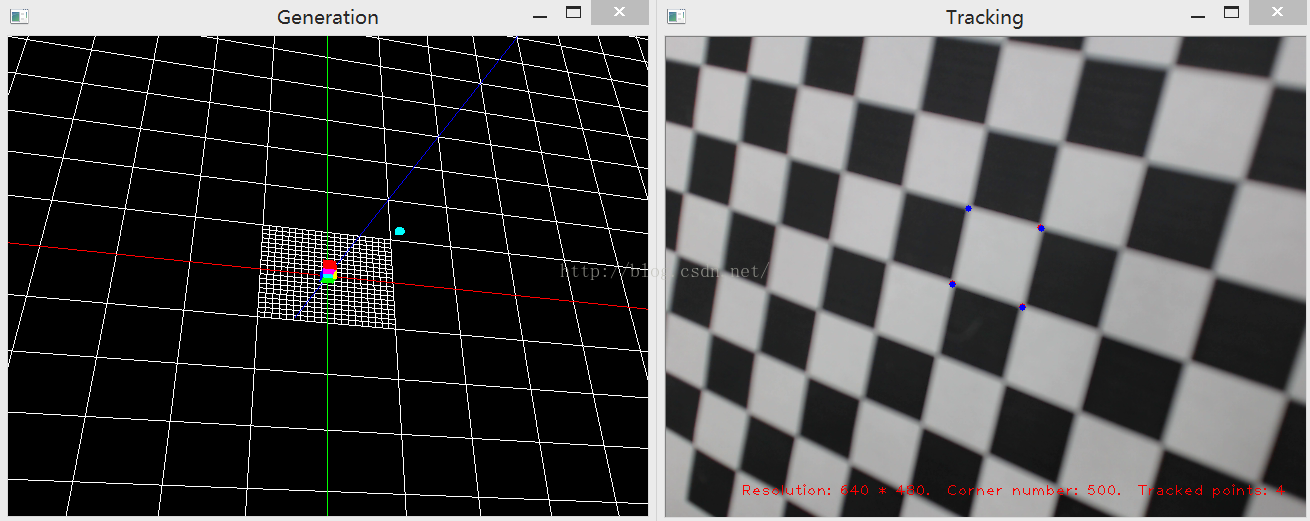
}draw_camera()部分,画了网格,坐标轴以及物体,接着根据opencv中的相机姿态计算opengl中相机对于坐标原点的位置(先求旋转矩阵的转置矩阵,然后乘以平移矩阵),最后把opengl中的相机画出来。代码如下:
void draw_camera()
{
glColor3f(1.0,1.0,1.0);
glPushMatrix();
glScalef(0.25,0.25,0.25);
glBegin(GL_LINES);
for(float i = -5;i<5.1;i+=0.5)
{
glVertex3f(-5,i,0);
glVertex3f(5,i,0);
glVertex3f(i,-5,0);
glVertex3f(i,5,0);
}
glEnd();
glBegin(GL_LINES);
for(int i = -50;i<51;i+=5)
{
glVertex3i(-50,i,0);
glVertex3i(50,i,0);
glVertex3i(i,-50,0);
glVertex3i(i,50,0);
}
glEnd();
glColor3f(1.0,0.0,0.0);
glBegin(GL_LINES);
glVertex3i(-50,0,0);
glVertex3i(100,0,0);
glEnd();
glColor3f(0.0,1.0,0.0);
glBegin(GL_LINES);
glVertex3i(0,-50,0);
glVertex3i(0,100,0);
glEnd();
glColor3f(0.0,0.0,1.0);
glBegin(GL_LINES);
glVertex3i(0,0,-10);
glVertex3i(0,0,50);
glEnd();
glEnable(GL_DEPTH_TEST);
draw_object();
glDisable(GL_DEPTH_TEST);
if(needtomap && trackingpoints == num_track)
{
glPushMatrix();
Mat tempR;
Mat rotM(3,3,CV_64FC1);
Rodrigues(rvecm,rotM);
rotM.copyTo(tempR);
tempR = tempR.t();
vector<double> tempv(3);
Mat tempT(tempv);
tvecm.copyTo(tempT);
tempT = tempR * tempT;
glTranslated(-tempv[0],tempv[1],tempv[2]);
glutSolidCube(0.5);
glPopMatrix();
}
glPopMatrix();
}结果如下(不同角度):
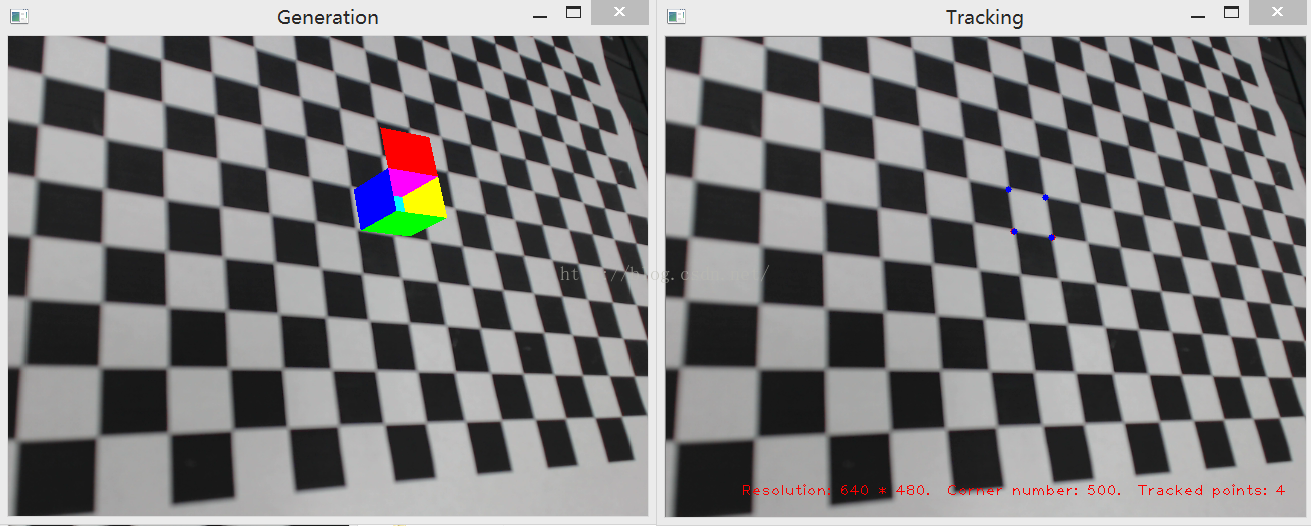
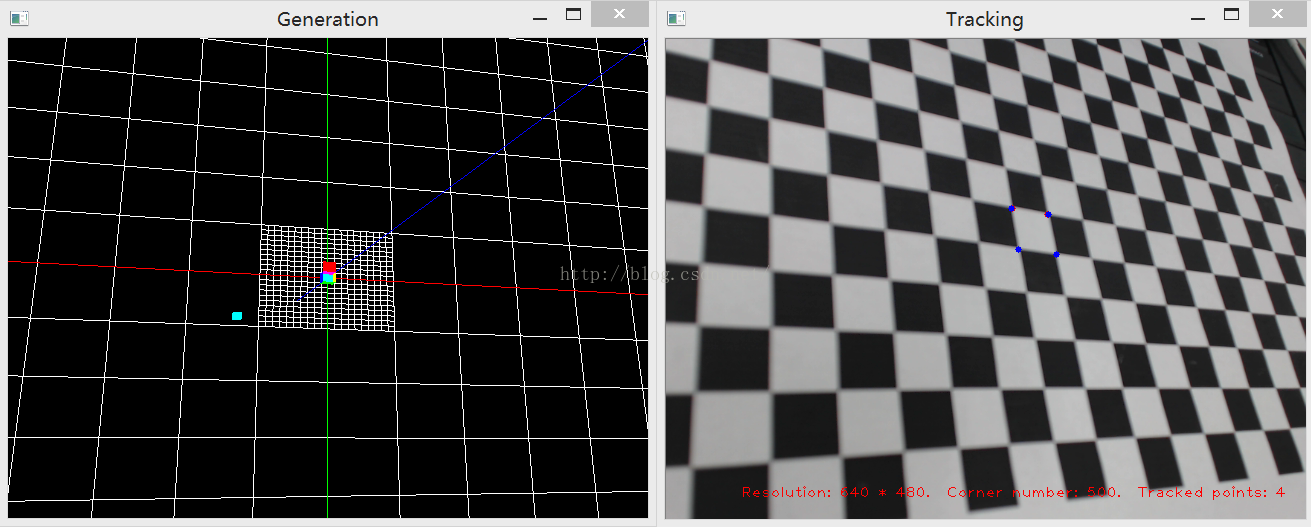
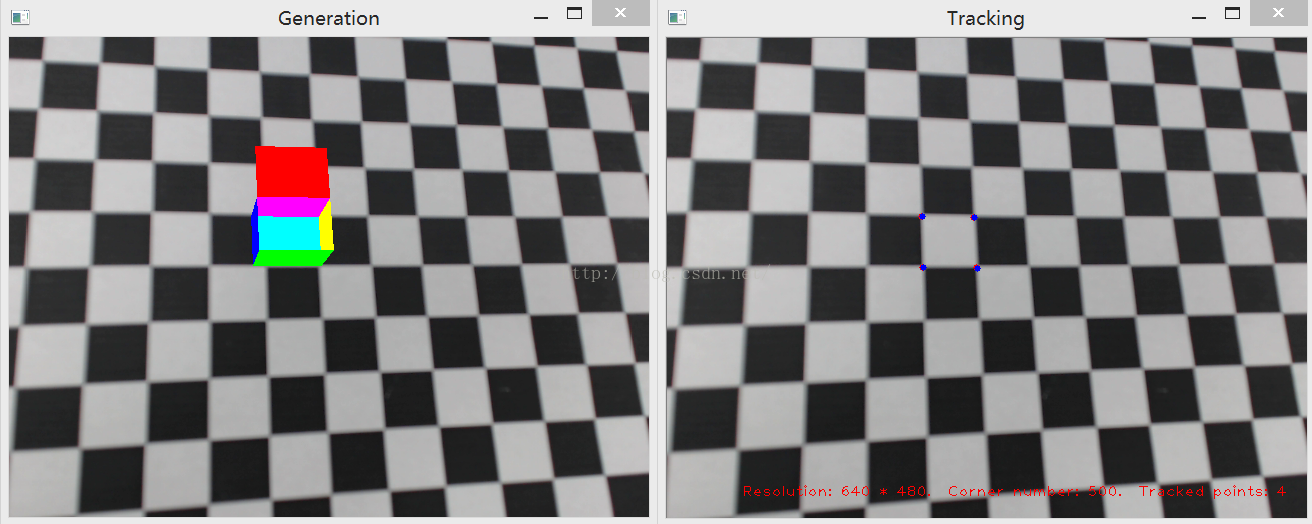
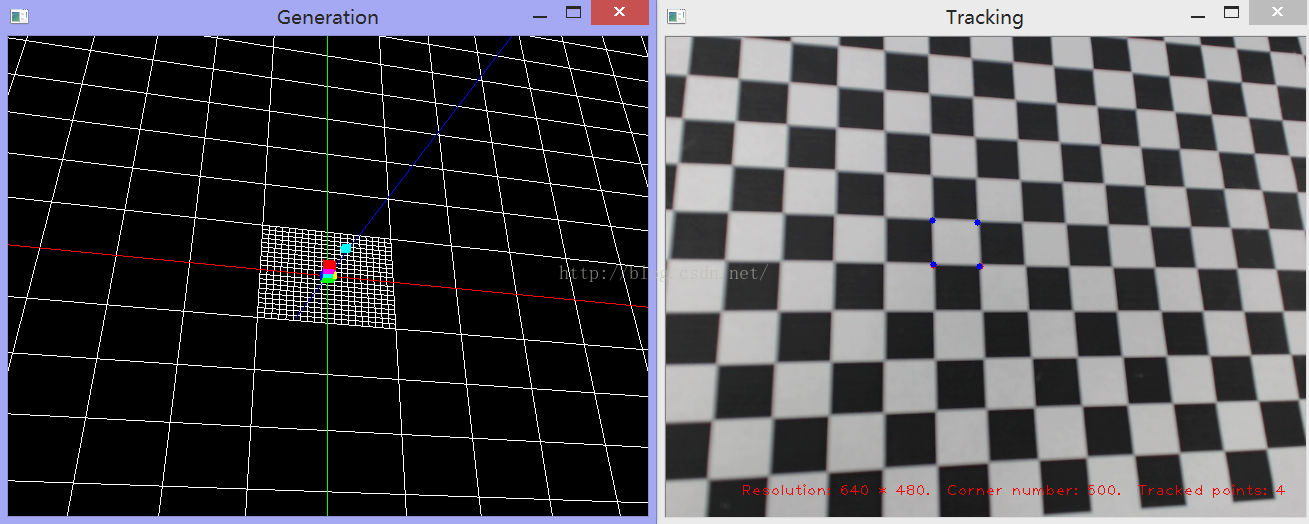
到此项目基本结束。下一节将改进orb算法,还将尝试特征点跟踪失败后的跟踪恢复。














 3952
3952











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









