










From:http://blog.csdn.net/c602273091/article/details/52695924
SLAM is short for simutaneous localization and mapping, which plays an important part in perception of robotics like autonomous driving or VR/AR.(In robotics, there are three component. Perception, control, decision) SLAM can build map for robots in unfamiliar environments and estimate pose for robots. With this map and pose estimation, robots can have better performance in following steps.
Take the ORB-SLAM as an example.(ORB-SLAM is the best paper in IEEE. Transaction Robotics)
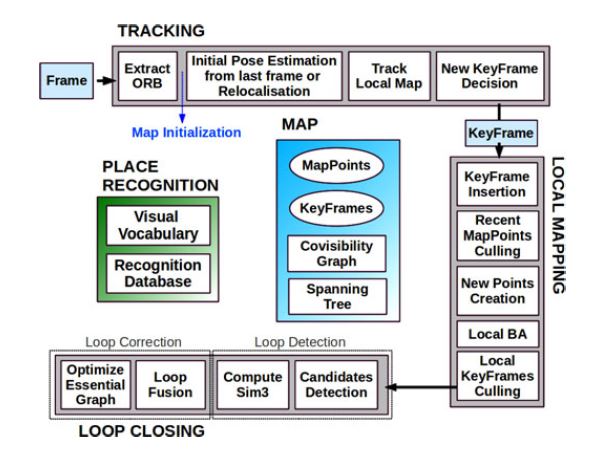
From the above image, we have system overview of ORB-SLAM. ORB-SLAM has three threads, which can speed up the implementation to achieve real time requirement.
The map is built firstly to extract ORB feature from frames. If the frame is satisfied with map initialization requirement, we will set the coordinate. Then we match the frames in between to localize and add new map points to the map. At the same time, we will overview the key frames to eliminate redundant information to save memory.
As for the map we have built, we will do loop closing to optimize the map and detect loop.
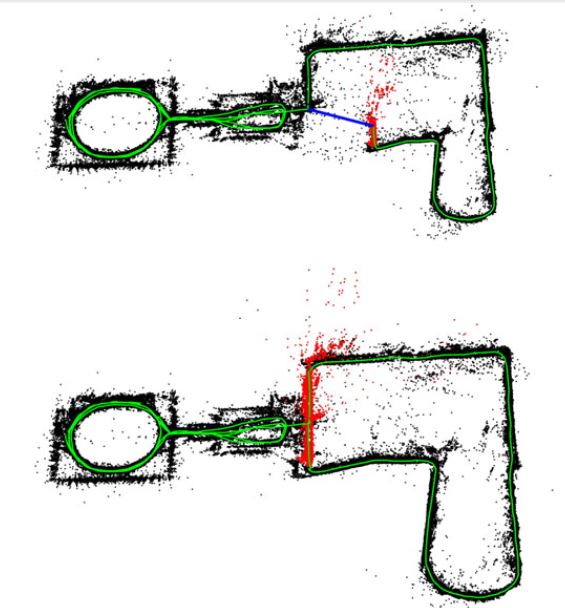
The following picture illustrates the performance of ORB-SLAM.
So what is SLAM? Pose estimation and map.















 2736
2736

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









